Операції факторизації та сепарації.
Вхідний сигнал Х(t) динамічної системи має вигляд:
Х(t) = Λ(t) + N(t). (3.1)
Потрiбний вихiдний сигнал У(t), який виражається як деяке відоме (бажане) перетворення вектору корисного сигналу Λ(t), має вигляд:
У(t) = Н{Λ(t)}, (3.2)
де: Н{Λ(t)} - матричний оператор.
На основі узагальненого рівняння Вiнера-Хопфа фізично реалiзуємi керованi багатовимiрнi системи в областi зображення мають вид:
 , (3.3)
, (3.3)
де: Wj(p) – вектор передаточних функцiй системи;
Sj(p) – вектор взаємних спектральних щiльностей вхiдних та ідеальних вихiдних сигналiв;
 – довiльний вектор спектральних щiльностей.
– довiльний вектор спектральних щiльностей.
У формулi (3.3) аргумент (р) випущений. Вектор  , досi невiдомий, може мати особливостi тiльки у правiй на півплощині параметру р.
, досi невiдомий, може мати особливостi тiльки у правiй на півплощині параметру р.
Матриця включає спектральнi щiльностi вхiдних сигналiв, якi представляють собою парнi функцiї. Парну функцiю, як і матрицю S, можна представити в виглядi добутку двох матриць, одна з яких  включає функцiї, що мають всi полюси та нулi в лiвiй напiвплощинi, а друга матриця
включає функцiї, що мають всi полюси та нулi в лiвiй напiвплощинi, а друга матриця  - в правiй, тобто S =S+ S – .
- в правiй, тобто S =S+ S – .
З врахуванням операції факторизації рiвняння (3.3) має вид:
 =
=  . (3.4)
. (3.4)
Лiва частина рiвняння (3.4) представляє собою матрицю, функцiї якої мають всi полюси в лiвiй напiвплощинi, оскiльки обидвi матрицi та володiють цiєю властивiстю за визначенням. Другий доданок (3.4) має функцiї, якi мiстять всi полюси в правiй напiвплощинi, оскiльки матриця  володiє цiєю властивiстю за визначенням, а S– має нулi та полюси в правiй напiвплощинi. Перший доданок правої частини рiвняння (3.4) включає матрицю
володiє цiєю властивiстю за визначенням, а S– має нулi та полюси в правiй напiвплощинi. Перший доданок правої частини рiвняння (3.4) включає матрицю  , яка мiстить функцiї, що мають полюси як в лiвiй, так i в правiй пiвплощинi.
, яка мiстить функцiї, що мають полюси як в лiвiй, так i в правiй пiвплощинi.
Пiсля операцiї сепарацiї маємо:
 , (3.5)
, (3.5)
де: [S–]-1 – обернена матриця факторизованiй матрицi спектральних
щiльностей входу Х;
Sj – матриця взаємних спектральних щiльностей мiж iдеальним
сигналом входу Λ та виходу У;
{Sj[S–]-1}+ – сепарована матриця.
Рiвняння (3.4) з врахуванням (3.5):
 . (3.6)
. (3.6)
Обидва члени лiвої частини (3.6) мають функцiї, якi мiстять всi полюси в лiвiй напiвплощинi, а обидва доданки правої частини складенi з матриць, якi влючають функцiї, що мiстять всi полюси в правiй напiвплощинi. З врахуванням вимог аналiтичностi та обмеженостi матриць S та Sj можна показати, що права частина рівняння (3.6) обертається в нуль. Тому в кiнцевому видi вихiдне рiвняння для статистичного синтезу має вигляд:
 . (3.7)
. (3.7)
Схема синтезу багатовимiрної системи керування мiстить наступнi операцiї: факторизацiю рацiональної матрицi спектральних щiльностей, знаходження обернених матриць, обчислення матриці {Sj[S–]-1} та виконання операцiї сепарацiї, знаходження результуючої матрицi передаточних функцiй.
Факторизацiя рацiональної матрицi без врахування умов фiзичної реалiзовностi фiльтру виконується достатньо просто. В протилежному випадку рiшення задачi достатньо складне та громiздке, потребує великої спостерегливостi.
В рядi задач пiдвищення точностi розмiрiв матрицю S можна привести до дiагональної форми, дякуючи чому багатовимiрну систему можна представити у виглядi суми h одновимiрних пiдсистем.
Спектральна матриця h - вимiрного вхiдного процесу є симетрична матриця:
 .
.
Використовуючи ортогональне перетворення, одержимо дiагональну матрицю V у виглядi (ω – випущений):
V =  ST, (3.8)
ST, (3.8)
де  – транспонована матриця ортогональної матрицi Т.
– транспонована матриця ортогональної матрицi Т.
Тодi: V =  , (3.9)
, (3.9)
де  – власнi значення симетричної матрицi S,
– власнi значення симетричної матрицi S,
що визначаються з умови:
(S -  I)Х = 0, (3.10)
I)Х = 0, (3.10)
де Х – вектор вхiдних впливiв у виглядi матриці стовпця h×1;
I – одинична матриця.
Прирiвнявши нулю визначник |S- I|=0, знаходимо
 = 0. (3.11)
= 0. (3.11)
Наприклад у випадку двовимiрного об'єкту iз (3.10) та (3.11) виходить:
 = 0.
= 0.
Коренi характеристичного рівняння:
 = 0 (3.12)
= 0 (3.12)
являються елементами головної дiагоналi матриці:
 . (3.13)
. (3.13)
Таким чином, при виконаннi окремих умов матриця має достатньо простi елементи, якi визначаються комбiнацiями спектральних щiльностей корисного сигналу та перешкод.
Розглянемо одновимiрне рiвняння Вiнера-Хопфа в комплекснiй областi, яке має вигляд (аргумент р – випущений):
SxxW - Syl = f, (3.19)
де Sxx – спектральна щiльнiсть суми корисного сигналу Sl та перешкод SN;
Syl – взаємна спектральна щiльнiсть iдеального вхiдного сигналу та вихiдного.
Пiсля факторизацiї спектральної щільності:
 . (3.20)
. (3.20)
Доведено, що:
W =  . (3.21)
. (3.21)
І являє собою унiверсальний алгоритм визначення передаточних функцiй стацiонарних лiнiйних оптимальних систем. Однак слабкою ланкою є визначення взаємної спектральної щiльностi, яка вважається вiдомою. Тому її слiд визначити або експериментально, але тодi треба знати корисний сигнал на входi динамiчної системи, або аналiтично, наприклад, за теоремою Вiнера-Хiнчина, коли для некорельованих корисного сигналу та перешкод можна записати:
Syl =Н Sl. (3.22)
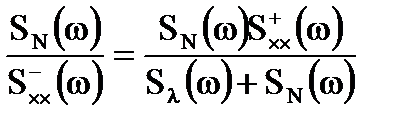
З врахуванням того, що Sl = Sxx - SN, де SN - спектральна щiльнiсть перешкод, з рiвняння (3.2) маємо:
 . (3.23)
. (3.23)
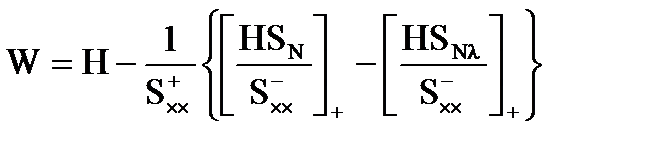
Права частина рiвняння (3.23) дорiвнює нулю, тому оптимальна передаточна функцiя динамiчної системи має вигляд:
 . (3.24)
. (3.24)
Якщо Syl =H( Sl + SNl ), де SNl – взаємна спектральна щiльнiсть перешкоди та корисного сигналу, то з рiвняння (3.20) виходить що:
 . (3.25)
. (3.25)
В випадку наявностi комплексно-спряжених коренiв вихiдний вираз для операцiї сепарацiї у вiдповiдностi з (3.24) має вигляд:
 . (3.26)
. (3.26)
У випадку iснування дiйсних коренiв у вiдповiдностi з виразом (3.2), коли Н = 1, визначили вихiдне рiвняння для виконання операцiї сепарації:
 , (3.27)
, (3.27)
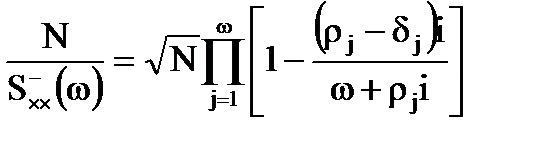
яке у вiдповiдностi з результатом роботи можна представити у виглядi:
 , (3.28)
, (3.28)
де смуги, якi входять в суму, знаходяться в нижнiй напiвплощинi. Значення параметру gi, наприклад, для полiнома другого порядку знаходимо шляхом вирiшення системи рiвнянь:
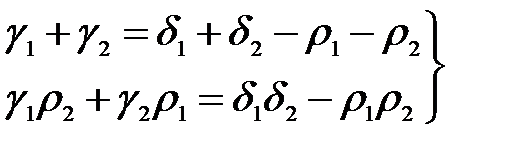 .
.
Виконавши операцiю сепарації:
 , (3.29)
, (3.29)
на основi рiвняння (3.24) отримаємо оптимальну передаточну функцiю замкнутої системи:
W(p) = 1 -  . (3.30)
. (3.30)
Другий член рiшення представляє передаточну функцiю вiдносної помилки та визначається вiдношенням квадратного кореня з спектральної щiльностi перешкоди до факторизованої спектральної щiльностi суми сигналу та перешкоди.
Дата добавления: 2015-03-03; просмотров: 933;