Расчет и построение механических характеристик асинхронного двигателя
Асинхронные двигатели получили широкое распространение благодаря простоте своей конструкции и высокой надежности.
При подаче на обмотки статора напряжений, сдвинутых по фазе ни 120°, по обмоткам протекают токи, создается круговое вращающее магнитное поле, пересекающее обмотки ротора и наводящее в них ЭДС.
Так как обмотка ротора имеет замкнутую электрическую цепь, в ней под действием ЭДС возникает ток. При взаимодействии роторных токов с вращающимся магнитным полем статора создается вращающий электромагнитный момент на валу электродвигателя. Под действием этого момента ротор вращается и сторону вращающегося магнитного поля статора, причем частота вращения ротора двигателя всегда меньше частоты вращения магнитного поля статора.
Частота вращения магнитного поля находится в строгой зависимости и от частоты f1подводимого напряжения сети и числа пар полюсов pдвигателя:
 (4.1)
(4.1)
где f1 – частота питающей сети;
p - число пар полюсов.
Одним из показателей, характеризующих работу асинхронного двигателя, является скольжение ротора, под которым понимается отношение
 (4.2)
(4.2)
где n1 - частота вращения магнитного поля статора;
n2 - частота вращения ротора электродвигателя;
w1 – угловая скорость магнитного поля статора;
w2 - угловая скорость ротора электродвигателя.
При выводе уравнения механической характеристики асинхронного двигателя необходимо обратиться к упрощенной схеме замещения (см. рис. 4.1).
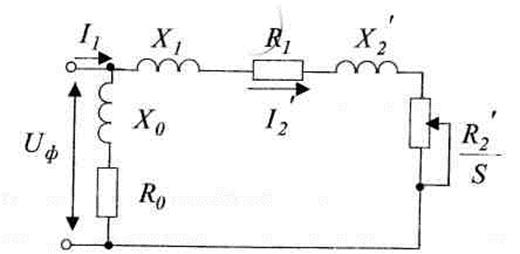
Рисунок 4.1 – Упрощенная схема замещения асинхронного электродвигателя
В соответствии с приведенной схемой находим выражение для приведенного вторичного тока:
 , (4.3)
, (4.3)
где R1, R2’ - соответственно первичное и вторичное приведенные активные сопротивления;
R0 , X0 - активное и реактивное сопротивление контура намагничивания;
X1, X2’ -первичное и вторичное приведенное сопротивление рассеяния;
S - скольжение двигателя.
Вращающий момент асинхронного двигателя может быть определен из выражения потерь:
 (4.4)
(4.4)
 (4.5)
(4.5)
Подставляя значение I2в (4.5), получаем уравнение механической характеристики асинхронного двигателя:
 (4.6)
(4.6)
Из выражения (4.6) видно, что угловую скорость вращения асинхронного двигателя можно регулировать изменением напряжения на зажимах двигателя, введением добавочного сопротивления в цепь статора или ротора, а если обратиться к выражению (4.1), то становятся очевидными еще два способа регулирования угловой скорости, а именно: изменением числа пар полюсов и изменением частоты питающей сети.
Использование уравнения (4.6) для практических расчетов весьма затруднительно, поэтому в практических расчетах пользуются формулой Клосса:
 (4.7)
(4.7)
или общей формулой
 (4.8)
(4.8)
где Мкр - максимальный (критический) момент двигателя, Н*м;
Sкр - скольжение, соответствующее максимальному моменту;
q - параметр, зависящий от конструктивных особенностей.
Максимальный (критический) момент двигателя Мкр определяется по номинальному моменту двигателя Мн и его перегрузочной способности mк:
 (4.9)
(4.9)
Значение критического скольжения Sкр с достаточной степенью точности может быть определено по соотношению
 , (4.10)
, (4.10)
где Sн - номинальное скольжение;
mк - кратность критического момента.
Параметр q рассчитывается по соотношению
 (4.11)
(4.11)
 (4.12)
(4.12)
где mп - кратность пускового момента.
Характерными точками механической характеристики асинхронного электродвигателя являются:
точка пуска с координатами w = 0; М = Мн;
точка провала на пусковой ветви, угловая скорость, в которой w соответствует скольжению S = 0,8, М = Ммин;
критическая точка с координатами wкр и М = Мкр;
номинальная точка w = wн, М = Мн;
точка холостого хода, в которой w = w1; М = 0 (см. рис. 4.2).
Участок механической характеристики в интервале угловых скоростей от w = w1 до w = wкр называется рабочей частью характеристики. В интервале угловых скоростей от w = wкр до w = 0 находится пусковой участок механической характеристики.
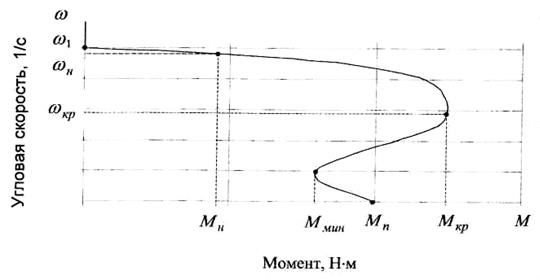
Рисунок 4.2 – Механическая характеристика асинхронного двигателя
 Пример 4
Пример 4
Рассчитать и построить механическую характеристику асинхронного двигателя типа АИР56А2. Паспортные данные: Рн=0,18кВт; nн=2730 об/мин; hн=0,68; cos j = 0,78;  ;
;  .
.
Решение
 об/мин;
об/мин;  ;
;
 ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;
Результаты расчетов механической характеристики по общей формуле Клосса сводим в таблицу 4.1. По полученным данным строим зависимости М=f(w) и М=f(S) (см. рис. 4.3).
Таблица 4.1 – Результаты расчетов механической характеристики асинхронного двигателя типа АИР56А2
| Характерные точки | Холостого хода | Номинальная | Критическая | Пусковая | ||||||
| S | 0,05 | 0,09 | 0,2 | 0,37 | 0,4 | 0,5 | 0,6 | 0,8 | 1,0 | |
| n, об/мин | ||||||||||
| w,с-1 | 299,25 | 286,65 | 198,45 | 157,5 | ||||||
| Мдв , Н×м | 0,366 | 0,628 | 1,154 | 1,38 | 1,376 | 1,319 | 1,233 | 1,051 | 0,898 |
|
|
|
|
Рис. 4.3 – Механические характеристики асинхронного двигателя
типа АИР56А2
Асинхронные электродвигатели с современными способами регулирования скорости вращения не уступают электродвигателям постоянного тока. Основными способами регулирования являются: включение сопротивления в цепь ротора (только для двигателей с фазным ротором); изменение числа пар полюсов или изменение частоты питающего тока, изменение величины подводимого напряжения. Применяют также электромагнитные муфты скольжения.
Регулирование переключением числа пар полюсов применяют для многоскоростных электродвигателей с короткозамкнутым ротором. Недостатком является ступенчатое регулирование скорости.
Дата добавления: 2015-02-25; просмотров: 5810;