Механические характеристики ДПТ с параллельным возбуждением в различных режимах торможения
Для двигателя постоянного тока с параллельным возбуждением возможны следующие тормозные режимы работы:
1) генераторное торможение с отдачей энергии в сеть (рекуперативное торможение);
2) динамическое торможение;
3) торможение противовключением.
Режимом рекуперативного торможения называют такой режим, когда электродвигатель при определенных режимах работы привода, в силу своей обратимости, становится генератором, преобразуя кинетическую энергию движущихся масс механизма в электрическую с отдачей ее в питающую сеть.
Переход электродвигателя в генераторный режим с отдачей энергии в сеть возможен при скорости привода, превышающей скорость соответствующего идеального холостого хода. При этом ЭДС двигателя, направленная противоположно напряжению сети, становится больше его, и ток в якоре электродвигателя меняет направление на обратное. Практически режим рекуперативного торможения может быть осуществлен:
1) при наличии отрицательного статического момента нагрузки, когда электродвигатель под его действием в сторону вращения, получив ускорение, достигает скорости, превышающей скорость идеального холостого хода;
2) при переходе электродвигателя с большей скорости, полученной ослаблением потока двигателя, на меньшую за счет резкого увеличения магнитного потока.
Так как М = - МТ, то уравнение механической характеристики для данного режима будет следующим:
 (3.1)
(3.1)
Из уравнения (3.1) следует, что механические характеристики в данном режиме при различных значениях сопротивлений в якорной цепи электродвигателя являются продолжением характеристик двигательного режима в области второго квадранта (рис. 3.1). С увеличением скорости w при неизменном R величина тормозного момента возрастает. Увеличение внешнего сопротивления в цепи якоря при неизменном отрицательном статическом моменте на валу электродвигателя приводит к увеличению скорости привода.
 Рис. 3.1 Рис. 3.2
Рис. 3.1 Рис. 3.2
|
Переход из двигательного режима в режим рекуперации при резком увеличении потока возбуждения двигателя приведен на рис. 3.2.
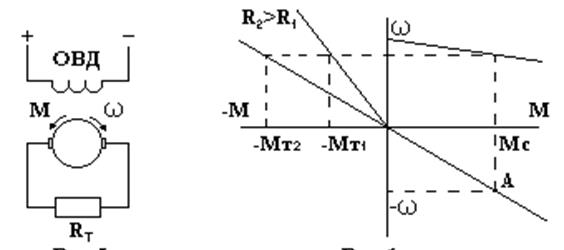
Режимом электродинамического торможения называют такой режим работы электродвигателя, при котором его якорь отключается от питающей сети и замыкается на внешнее сопротивление, а обмотка возбуждения остается подключенной к сети. В этом режиме двигатель работает в режиме генератора с независимым возбуждением (рис. 3.3), преобразуя кинетическую энергию движущихся инерционных масс привода в электрическую, которая расходуется на нагрев сопротивлений в якорной цепи.
Уравнение механической характеристики в режиме динамического торможения можно получить из (3.1), полагая в нем напряжение сети равным нулю, U=0 :
 , (3.2)
, (3.2)
где R=RЯ+RT.
Из уравнения (1.7) видно, что механические характеристики в режиме динамического торможения расположены во втором квадранте и представляют прямые линии, проходящие через начало координат.
|
Рис. 3.3 Рис. 3.4
Тормозной момент возрастает с уменьшением тормозного сопротивления и наоборот (рис. 3.4). Наибольшего тормозного эффекта можно достигнуть при замыкании якоря двигателя накоротко.
По условиям ограничения тормозного тока замыкание якоря накоротко применяется только для двигателей малой мощности, обладающих сравнительно большим сопротивлением якоря, а также для всех остальных электродвигателей при торможении на малых скоростях.
Динамическое торможение может быть использовано при тормозном спуске груза. В этом случае установившийся режим спуска будет иметь место при скорости, определяемой точкой А (рис. 3.4).
Режимом противовключения называется такой режим работы, когда при вращении электродвигателя под действием инерционных масс привода в электродвигатель из сети поступает ток такого направления, которое соответствует вращению его в противоположную сторону.
Переход из двигательного режима в режим противовключения осуществляется изменением полярности напряжения на зажимах якоря.
При изменении полярности напряжения (рис. 3.5) необходимо в цепь якоря двигателя ввести внешнее тормозное сопротивление, с тем, чтобы ток в нем, обусловленный суммой напряжения в сети и ЭДС электродвигателя, не превысил допустимого значения.
Уравнение механической характеристики для данного режима получается из (3.1) при смене знака перед напряжением:
 . (3.3)
. (3.3)
Анализ уравнения (3.3) показывает, что механические характеристики в режиме противовключения линейны и расположены во втором квадранте (рис. 3.6). С уменьшением тормозного сопротивления тормозной момент возрастает и наоборот.
  Рис. 3.5 Рис. 3.6
Рис. 3.5 Рис. 3.6
|
Режим противовключения может быть получен без изменения полярности напряжения на якоре двигателя при наличии активного момента сопротивления на его валу за счет введения в цепь якоря достаточно большого сопротивления. Установившаяся скорость вращения при этом находится в четвертом квадранте (точка А, рис. 3.6)
Пример 3
Двигатель П11. Паспортные данные двигателя: Рн=0,7кВт=700Вт; Iн=4,3А; hн=0,735; Uн=220В; nн=3000 об/мин. Рассчитать и построить естественную механическую характеристику (ЕМХ).
Определить сопротивление реостата, который нужно ввести в цепь якоря, чтобы при работе в режиме рекуперативного торможения при номинальном моменте получить n1=4200 об/мин; в режиме динамического торможения при номинальном моменте получить n2=1500 об/мин; при торможении противовключением при номинальном моменте получить n3=100 об/мин. Построить на одном графике механические характеристики для каждого режима торможения и подписать величины добавочных сопротивлений в цепи якоря.
Решение
Строим естественную механическую характеристику ДПТ параллельного возбуждения (см пример 1), по двум точкам:
1. w=wн; М=Мн;
2. w=wо; М=0.



Определим величину добавочного сопротивления R1 в цепи якоря для осуществления режима рекуперации с условием, чтобы при М=МН , n1=4200 об/мин(w1=441с-1).
 Þ
Þ 
Определим величину Е1 исходя из следующих рассуждений:
E1=Ce× Ф× w1; EН=Ce× Ф× wН;
EН=UH -IH× Ra ,следовательно
 Þ
Þ  Þ
Þ
 ;
;
 .
.
Координаты точек механической характеристики при рекуперативном торможении:

Определим величину добавочного сопротивления R2 в цепи якоря для осуществления режима динамического торможения при условии, что М=МН , n2=1500 об/мин(w2=157,5с-1).

При динамическом торможении якорь отключен от сети, следовательно, подводимое к якорю напряжение UH=0 , поэтому
 Þ
Þ 
Величину Е2 находим, рассуждая аналогично предыдущему случаю:


Координаты точек механической характеристики при динамическом торможении:

 .
.
Определим величину добавочного сопротивления R3 в цепи якоря для осуществления режима противовключения при условии, что М=МН , n3=100 об/мин(w3=10,5с-1).
В режиме противовключения UH и I меняют своё направление, поэтому
 Þ
Þ 


Координаты точек механической характеристики при противовключении:

Механические характеристики ДПТ марки П11 для различных режимов торможения, построенные по результатам расчетов, представлены на рисунке 1.10.
1 – естественная механическая характеристика (ЕМХ); 2 - механическая характеристика при рекуперативном торможении (R1=4,19Ом); 3 - механическая характеристика при динамическом торможении (R2=15,41Ом); 4 - механическая характеристика в режиме противовключения со сменой полярности (R3=45,86Ом).
Рис. 3.7 – Механические характеристики ДПТ марки П11 для различных режимов электрического торможения
Дата добавления: 2015-02-25; просмотров: 4789;