Вращающий момент реактивного двигателя.
Вращение ротора реактивного двигателя осуществляется под действием реактивного момента, причина возникновения которого была рассмотрена ранее (см. § 13.3). Из выражения, определяющего величину реактивного момента, следует, что максимальное значение момента  наступает при нагрузке, соответствующей углу
наступает при нагрузке, соответствующей углу  ° (рис. 4.17, кривая 1).
° (рис. 4.17, кривая 1).
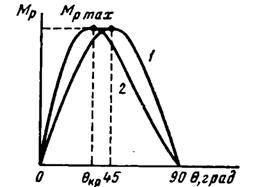
Рис. 4.17. Угловая характеристика реактивного двигателя
Однако выражение (4.6) не учитывает влияния активного сопротивления обмотки статора на зависимость  , которое в реактивных двигателях малой мощности довольно значительно. Под влиянием активного сопротивления обмотки статора максимальное значение реактивного момента наступает при
, которое в реактивных двигателях малой мощности довольно значительно. Под влиянием активного сопротивления обмотки статора максимальное значение реактивного момента наступает при  °
°  . Это увеличивает крутизну кривой в ее начальной части (рис. 4.17, кривая 2), а, следовательно, повышает величину удельного синхронизирующего момента МУД.
. Это увеличивает крутизну кривой в ее начальной части (рис. 4.17, кривая 2), а, следовательно, повышает величину удельного синхронизирующего момента МУД.
Удельный синхронизирующий момент – это момент, приходящийся на 1° угла  :
:  и определяющий устойчивость работы реактивного двигателя.
и определяющий устойчивость работы реактивного двигателя.
Максимальный момент реактивного двигателя принято называть моментом выхода из синхронизма. Дело в том, что если нагрузка на валу двигателя достигнет значения, при котором угол  , произойдет «выпадение» двигателя из синхронизма. В этом случае ротор двигателя либо останавливается, либо продолжает вращаться асинхронно под действием электромагнитного момента, создаваемого токами пусковой короткозамкнутой обмотки.
, произойдет «выпадение» двигателя из синхронизма. В этом случае ротор двигателя либо останавливается, либо продолжает вращаться асинхронно под действием электромагнитного момента, создаваемого токами пусковой короткозамкнутой обмотки.
Из выражения (4.6) видно, что величина реактивного момента пропорциональна квадрату подводимого к двигателю напряжения  . Следовательно, реактивные двигатели весьма чувствительны к колебаниям напряжения сети.
. Следовательно, реактивные двигатели весьма чувствительны к колебаниям напряжения сети.
Представим индуктивные сопротивления обмотки статора по продольной  и поперечной
и поперечной  осям в виде:
осям в виде:
 ;
;  (4.7)
(4.7)
где  и
и  – индуктивности обмотки статора по продольной и поперечной осям:
– индуктивности обмотки статора по продольной и поперечной осям:
 ;
;  (4.8)
(4.8)
Причем  и
и  – магнитные проводимости по продольной и поперечной осям машины.
– магнитные проводимости по продольной и поперечной осям машины.
Подставив выражения (4.7) и (4.8) в (4.6), получим формулу реактивного момента:
 , (4.9)
, (4.9)
где  и
и  – магнитные сопротивления по поперечной и продольной осям машины.
– магнитные сопротивления по поперечной и продольной осям машины.
Из формулы (4.9) следует, что реактивный момент пропорционален разности магнитных сопротивлений по поперечной  и продольной
и продольной  осям машины.
осям машины.
С углублением впадин на роторе (см. рис. 4.16, а) возрастает разность магнитных сопротивлений по поперечной и продольной осям и реактивный момент увеличивается, а, следовательно, увеличивается и момент выхода из синхронизма. Однако, углубление впадин на роторе целесообразно лишь до определенного предела, так как с увеличением глубины впадин возрастает средняя величина воздушного зазора. Это ведет к уменьшению вращающего момента в пусковом асинхронном режиме. Последнее приводит к снижению пускового момента и момента входа двигателя в синхронизм – наибольшего момента сопротивления, при котором ротор двигателя еще втягивается в синхронизм. Для втягивания в синхронизм необходима частота вращения ротора не менее  т. е. скольжение
т. е. скольжение  .
.
На рис. 4.18 показан ряд зависимостей электромагнитного момента от скольжения при разных значениях активного сопротивления пусковой клетки, причем  . Величина момента входа в синхронизм определяется скольжением s=0,05. Из сделанных на рисунке построений видно, что чем больше активное сопротивление пусковой клетки, тем меньше момент входа в синхронизм.
. Величина момента входа в синхронизм определяется скольжением s=0,05. Из сделанных на рисунке построений видно, что чем больше активное сопротивление пусковой клетки, тем меньше момент входа в синхронизм.
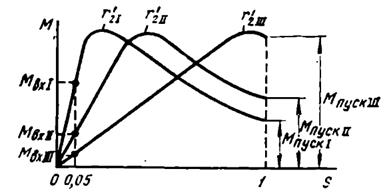
Рис. 4.18. Влияние  пусковой клетки реактивного двигателя на Мпуск и Мвх
пусковой клетки реактивного двигателя на Мпуск и Мвх
Установлено, что наилучшие соотношения между максимальным моментом (моментом выхода из синхронизма), начальным пусковым моментом и моментом входа в синхронизм получаются при следующих отношениях полюсной дуги bп к полюсному делению  и максимального воздушного зазора
и максимального воздушного зазора  к минимальному
к минимальному  (см. рис. 4.16, а):
(см. рис. 4.16, а):
 ;
; 
Существенный недостаток реактивных двигателей – низкий коэффициент мощности, что обусловлено значительной величиной намагничивающей составляющей тока статора.
Напомним, что в реактивном двигателе магнитный поток создается исключительно током статора; кроме того, среднее значение воздушного зазора из-за наличия впадин на роторе достаточно велико, что ведет к повышению сопротивления магнитной цепи машины. Указанные обстоятельства являются также причиною низкого к. п. д., который в двигателях мощностью в несколько десятков ватт обычно составляет  , а в двигателях мощностью до 10 Вт – не превышает 20%.
, а в двигателях мощностью до 10 Вт – не превышает 20%.
По габаритам реактивные двигатели больше синхронных и асинхронных двигателей обычного типа, что объясняется низким к. п. д., малым  , и небольшой величиной реактивного момента.
, и небольшой величиной реактивного момента.
В последнее время появились синхронные реактивные двигатели, у которых значительная разность магнитных сопротивлений по поперечной и продольной осям создается не за счет глубины межполюсных впадин, а за счет внутренних вырезов 1 в шихтованном сердечнике 2 ротора (рис. 4.19). Эти вырезы обычно заливаются алюминием. Такие двигатели обладают повышенными пусковыми и рабочими свойствами.
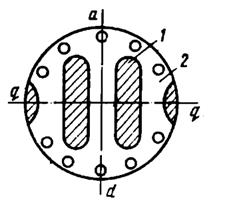
Рис. 4.19. Ротор реактивного двигателя с внутренними вырезами
Дата добавления: 2015-02-23; просмотров: 2740;