Шаговые исполнительные двигатели.
В настоящее время в схемах автоматики наряду с автоматическими системами непрерывного действия, которые осуществляются с помощью исполнительных двигателей (см. гл. III и X) обычного исполнения, применяются системы дискретного (импульсного) действия. Такие системы осуществляются с помощью шаговых исполнительных двигателей.
Шаговые двигатели – устройства, которые преобразуют электрические импульсы напряжения управления в дискретные (скачкообразные) угловые или линейные перемещения ротора с возможной его фиксацией в нужных положениях.
Шаговые двигатели появились в 30-х годах прошлого столетия.
Первые шаговые двигатели выполнялись в виде электромагнита, приводящего во вращение храповое колесо (рис. 4.27).
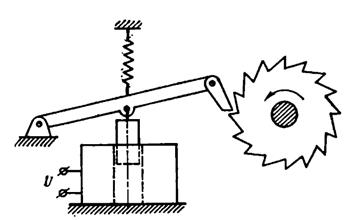
Рис. 4.27. Шаговый двигатель с электромагнитом и храповиком
За одно включение электромагнита (за один такт) храповое колесо перемещается на вполне определенный угол – шаг, величина которого определяется величиной зубцового шага храпового колеса. Для обеспечения реверса на валу двигателя устанавливалось два храповых колеса, повернутых на 180° относительно друг друга, и двигатель снабжался двумя электромагнитами. Несмотря на наличие целого ряда недостатков, храповые шаговые двигатели и в настоящее время находят еще довольно широкое применение.
Вслед за храповыми двигателями еще в прошлом веке появились шаговые двигатели, по устройству мало отличающиеся от синхронных реактивных двигателей с явно выраженными полюсами на роторе и статоре.
На рис. 4.28, а (справа) изображена схема одного из таких двигателей, имеющего три пары явно выраженных полюсов на статоре, снабженных согласно включенными обмотками (соответственно 1, 2, 3), и невозбужденный двухполюсный ротор. На том же рисунке (слева) изображен ключ – коллектор (коммутатор), с помощью которого осуществляется управление двигателем. Коммутатор выполнен в форме цилиндра с контактной пластиной КП, охватывающей дугу в 180°. Контактная пластина электрически соединена с контактным кольцом К, по которому скользит щетка Щ; на нее подается питание от сети постоянного тока (+). По внешней поверхности цилиндра коммутатора скользят щетки Щ1, Щ2, ЩЗ, сдвинутые в пространстве на 120° относительно друг друга. Каждая из щеток соединена с одним концом соответствующей обмотки двигателя. Другие концы обмоток соединены между собой, к их общему проводу подводится питание от источника постоянного тока (-).
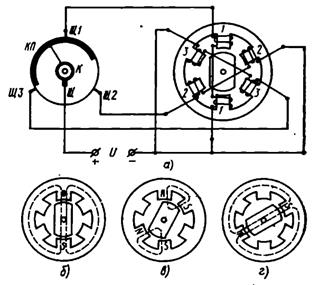
Рис. 4.28. Шаговый двигатель с контактным коммутатором
В положении, изображенном на рис. 4.28, а, включена обмотка 1, и ось полюсов ротора (при отсутствии момента сопротивления на валу) совпадает с осью обмотки 1 (рис. 4.28, б). При повороте цилиндра коммутатора на угол, примерно равный 60°, по часовой стрелке под напряжением оказываются две обмотки (1 и 2), при этом ротор двигателя повернется по часовой стрелке на угол 30° и займет положение, соответствующее рис. 4.28, в. При повороте цилиндра коммутатора далее на угол, несколько больший 60°, по часовой стрелке цепь обмотки 1 разорвется, обмотка 1 отключится, питаться будет только обмотка 2, и ротор двигателя повернется еще на 30°, заняв положение по оси обмотки 2 (рис. 4.28, г).
За полный цикл коммутации (поворот ротора коммутатора на 360°) ротор рассматриваемого двигателя занимает шесть различных положений, которые соответствуют определенной последовательности включения обмоток двигателя. Ротор двигателя при этом повернется на 180°, т. е. шаг двигателя равен 30°.
Частота вращения ротора двигателя зависит от частоты вращения цилиндра коммутатора, т. е. от частоты коммутации обмоток. Ротор любого шагового двигателя обладает моментом инерции; на валу ротора обычно имеется момент сопротивления. Для каждого шагового двигателя существует вполне определенная максимальная частота коммутации, при которой ротор двигателя еще следует за дискретно (скачкообразно) перемещающимся полем статора. Эту частоту называют частотой приемистости.
Для простоты анализа физических процессов здесь был рассмотрен простейший шаговый двигатель с контактным коммутатором. Аналогичные двигатели были предложены еще в 1892 г. В настоящее время из-за ряда недостатков контактные коммутаторы заменены более надежными электронными коммутаторами на полупроводниковых элементах, которые формируют импульсы вполне определенной формы и частоты, подаваемые на обмотки управления шаговых двигателей.
Применяемые в настоящее время шаговые двигатели в подавляющем большинстве являются многофазными и многополюсными синхронными электрическими машинами. В отличие от синхронных двигателей обычного исполнения их роторы не имеют пусковой короткозамкнутой обмотки, что обусловливается частотным (а не асинхронным) пуском шаговых двигателей. Роторы шаговых двигателей могут быть возбужденными – активными или невозбужденными – пассивными.
На рис. 4.29 изображена схема m-фазного шагового двигателя. Для упрощения анализа физических процессов рассмотрим работу этого двигателя с невозбужденным двухполюсным ротором.
Питание обмоток статора может быть однополярным либо двухполярным. При однополярной питании напряжение изменяется от 0 до +U: при двухполярном от +U до -U.
Современные электронные коммутаторы могут обеспечивать питание обмоток статора либо порознь, либо группами в различных сочетаниях. Каждому состоянию – такту коммутации, число которых зависит от способов включения обмоток, соответствуют вполне определенные величины и направления векторов результирующей м. д. с.  и потока двигателя Ф, а, следовательно, и вполне определенное положение ротора в пространстве.
и потока двигателя Ф, а, следовательно, и вполне определенное положение ротора в пространстве.
Так, если обмотки рассматриваемого двигателя питать поочередно (1-2-3-…-m) однополярными импульсами, то ротор двигателя будет иметь m устойчивых положений, которые совпадают с осями обмоток (рис. 4.29, а и в).
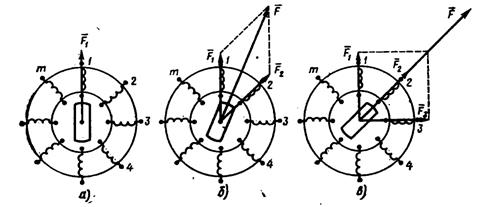
Рис. 4.29. К вопросу о принципе действия m – фазного шагового двигателя
На практике для увеличения результирующей м. д. с., магнитного потока и синхронизирующего момента обычно одновременно питаются две, три и большее количество обмоток. При этом ротор двигателя в режиме холостого хода занимает положения, в которых его ось совпадает с результирующим вектором м. д. с. В случае, когда питается четное число обмоток, положение результирующего вектора м. д. с. и ротора совпадает с линией, проходящей между двумя средними обмотками (рис. 4.29, б). В случае, когда питается нечетное число обмоток, устойчивые положения ротора совпадают с осью средней обмотки (рис. 4.29. а). Таким образом, в обоих случаях ротор двигателя будет иметь m устойчивых положений. Однако соседние положения при этом будут смещены на угол  .
.
Если поочередно включать то четное, то нечетное число обмоток, например 1-2, 2, 2-3, 3, … , m-1, то число устойчивых положений ротора n увеличится вдвое: n=2m.
На практике управление двигателя, при котором обмотки включаются поочередно равными группами по два, три и т. д., называют симметричным. Поочередное включение неравных групп обмоток называют несимметричным управлением.
Кроме однополярного и двухполярного, симметричного и несимметричного способов управления шаговыми двигателями различают еще потенциальный и импульсный способы управления.
При потенциальном управлении напряжения на обмотках изменяются только в моменты поступления управляющего сигнала – команды. При отсутствии последующего сигнала управления одна или группа обмоток, возбужденные предшествующим сигналом, остаются под напряжением, и ротор занимает вполне определенное фиксированное положение.
При импульсном управлении любая обмотка (или группа обмоток), возбужденная сигналом – импульсом управления, по истечении некоторого времени, определяемого длительностью импульса, автоматически отключается. Фиксация положения ротора в период паузы между импульсами обеспечивается либо внутренним реактивным моментом (если ротор активный), либо специальными магнитными или иными фиксирующими устройствами.
Кроме двухполюсных широко используются также многополюсные (2р>2) шаговые двигатели. Ротор ненагруженного моментом сопротивления многополюсного шагового двигателя при одном и том же питании обмоток может находиться в одном из р устойчивых положений. Таким образом, в m-фазном двигателе может быть либо рm устойчивых положений (при симметричном управлении), либо 2рm положений (при несимметричном управлении).
Современные электронные коммутаторы допускают переход от симметричного к несимметричному способам управления; от питания одной обмотки к питанию нескольких обмоток и т. п. Все это позволяет в довольно широких пределах менять величину шага у одного и того же двигателя, производить его реверс, торможение и т. д.
Характер движения ротора шагового двигателя определяется частотой и характером изменения управляющих импульсов. В зависимости от этого различают следующие режимы работы шаговых двигателей: 1) статический; 2) квазистатический; 3) установившийся; 4) переходный.
Статическим режимом шагового двигателя называется режим, при котором по обмоткам статора протекает постоянный ток; ток создает неподвижное в пространстве магнитное поле, и ротор двигателя не вращается. Под действием момента нагрузки ротор может лишь отклоняться на некоторый угол от положения устойчивого равновесия.
Квазистатический режим работы – это режим отработки единичных шагов, при котором переходные процессы, сопровождающие отработку шага, к началу следующего шага полностью заканчиваются, и частота вращения ротора в начале каждого шага равна нулю. Предельная частота импульса, при которой еще обеспечивается квазистатический режим, определяется временем протекания электромагнитных переходных и особенно механических переходных процессов, т. е. временем колебаний (качаний) ротора. Для уменьшения или полного устранения качаний ротора в конце шага применяют различные демпфирующие устройства.
Наиболее радикальным методом устранения качаний ротора, а, следовательно, увеличения предельной частоты квазистатического режима является гашение кинетической энергии, запасенной ротором при отработке шага, которое достигается за счет принудительного или естественного торможения ротора (старт-стопное управление).
При принудительном торможении после перевода управляющего импульса с первой обмотки (или группы обмоток) на вторую через некоторый промежуток времени, за который ротор отрабатывает часть шага и запасает определенное количество кинетической энергии, управляющий импульс переводится снова на первую обмотку. На ротор начинает действовать тормозящий его движение момент. При правильном выборе времени и величины тормозящего момента ротор останавливается в конце шага. После чего управляющий импульс вновь переводится на вторую обмотку и ротор, отработав шаг, фиксируется практически без колебаний.
При естественном торможении отработка шага происходит в два этапа: на первом этапе движение ротора осуществляется за счет положительного синхронизирующего момента, возникающего в результате сдвига м. д. с. статора на часть полного шага; на втором этапе – за счет кинетической энергии, запасенной ротором при отрицательном (тормозном) моменте. При перемещении ротора на величину полного шага м. д. с. сдвигается на оставшуюся часть шага и фиксирует ротор в этом положении. Естественное торможение применимо лишь в тех двигателях, у которых полный шаг делится на несколько элементарных шагов.
Установившийся режим работы шаговых двигателей – режим, соответствующий постоянной частоте управляющих импульсов. Ротор двигателя в установившемся режиме, имея постоянную среднюю частоту вращения, может совершать как периодические, так и непериодические колебания.
Переходные режимы работы шаговых двигателей – пуск, ускорение, замедление, реверс – являются основными эксплуатационными режимами работы большинства шаговых двигателей. Физические процессы, происходящие в переходных режимах, определяются как параметрами двигателя и его нагрузки, так и начальными условиями, при которых начинается переходный процесс.
Основным требованием, которое предъявляется к шаговым двигателям в переходных режимах, является требование отсутствия потери шага, т. е. сохранения синхронизма при любом характере изменения частоты управляющих импульсов.
Основными параметрами, которые определяют качество работы шагового двигателя в переходных режимах, являются следующие:
1) частота собственных круговых колебаний, зависящая от числа пар полюсов р, амплитуды статического синхронизирующего момента ММАХ и момента инерции ротора J:
 ;
;
2) электромагнитная постоянная времени, зависящая от индуктивности обмоток L и их активного сопротивления r:
 ;
;
3) коэффициент внутреннего демпфирования, зависящий от амплитуды потокосцепления и активного сопротивления обмоток статора r:
 ;
;
Рабочие характеристики шаговых двигателей определяются как параметрами самих двигателей и характером их нагрузки, так и особенностями электронного коммутатора.
В связи с многообразием рабочих режимов рабочие характеристики шаговых двигателей весьма разнообразны. В качестве примера рассмотрим предельные динамические характеристики пуска двигателя типа ШД-2-5, представляющие собой зависимость частоты приемистости f от момента сопротивления нагрузки МC. Из представленных на рис. 4.30 двух динамических характеристик видно, что с увеличением момента сопротивления частота приемистости снижается. При этом характеристика 1 двигателя, соответствующая моменту инерции нагрузки  , располагается выше характеристики 2, соответствующей моменту инерции
, располагается выше характеристики 2, соответствующей моменту инерции  .
.
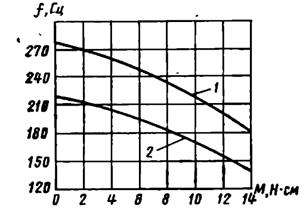
Рис. 4.30. Предельные динамические характеристики пуска шагового двигателя
В настоящее время разработано большое количество шаговых двигателей различных конструкций. На рис. 4.31 показано устройство шагового двигателя типа ШД-2. В расточке статора 1 расположен активный ротор – звездочка 2, представляющий постоянный магнит.
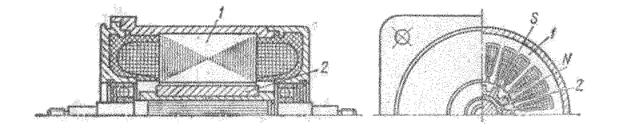
Рис. 4.31. Устройство шагового двигателя типа ШД-2
Дата добавления: 2015-02-23; просмотров: 2339;