Автомат водіння КС- 6Б
Модернізований автомат водіння складається з двох основних частин (рис.4.) кінетичної системи орієнтації (тонкі лінії) і гідравлічні системи управління (товсті лінії).
Кінетична система призначена для отримання сигналу орієнтації машин вздовж збираємих рядків, а гідравлічна система являється виконавчою - забезпечує керування передніми колесами машини в відповідності до отриманих сигналів орієнтації.
Основні вузли кінематичної системи: копіюючий пристрій, передаточний механізм, механізм переводу, рама.
Основні вузли гідравлічної системи золотник, спарені гідроциліндри-насос-дозатор, насосна установка, трубопроводи.
Копіюючий пристрій призначений для відслідковування збираємих рядків в процесі руху машини. Копіюючий пристрій складається з 3-х датчиків полоскового типу або типу копір – зрихлювач. Встановлених за допомогою кронштейнів на паралелограмних відрізках датчики жорстко з’єднані між собою регульованою тягою і підвішені до попереднього бруса рами на поворотних кронштейнах .
Передаточний механізм служить для передачі сигналу від копіюючого пристрою на плунжер золотника. Цей процес здійснюється наступним чином: повернення датчика через перестановочний важіль повздовжню тягу, двохплечий важіль і поперечну тягу передається на плунжер золотника і зміщує його в нейтральне положення у відповідну сторону. Відбувається спрацювання золотника.
Механізм переводу здійснює переведення копіюючого пристрою в робоче або транспортне положення. Механізм переводу складається з вала, встановленого в двох опорах рами автомата водіння, двох фіксуючих пружин з важелями, блок – уловлювачів і вилок. Поворот вала в верхнє або нижнє положення здійснюється гідроциліндром. Пружини в нижнім положенні прижимають датчики до ґрунту.
Рама складається з двох поздовжніх і одної поперечної труб. Кріпиться рама до двох кронштейнів балки моста керуючих коліс. На рамі розміщені вузли автомата водіння .
Золотник призначений для розподілення потоку масла із насосної установки: на злив при нейтральному положенні; або в одну з порожнин гідро циліндра управління з одночасним перепусканням масла з другої порожнини при поступленні вхідного масла від копіюючого пристрою. Плунжер-золотник переміщується в повздовжньому напрямку у втулці під дією шарикового пальця. На плунжері розміщені 4 пояска , які щільно входять у втулку утворюючи 3- пальцеві порожнини: центральну порожнину нагнітання і дві порожнини зливу з’єднаних між собою центральним осьовим й роздільними клапанами. Спарені гідро циліндри призначені для керування передніми колесами машини силовий гідроциліндр керування спарено з’єднані між собою торцями з протилежних кінців виходять штоки. Шток силового гідро циліндра приєднаний до кронштейна поворота керуючих коліс, а шток гідроциліндра приєднаний до кронштейна закріпленого на балці переднього моста.
Силовий гідроциліндр з’єднаний насосом дозатором рульового керування , а гідроциліндр керування – з золотниками-трубопроводами.
Принцип роботи автомата водіння КС-6Б
Проведення автомата водіння в робоче положення здійснюється одночасно з опусканням робочих органів (копачів) загальними важелями управління з кабіни машини. При цьому гідроциліндр 12 (мал.2) підключена до гідросистеми машини паралельно з гідро циліндром підйому робочих органів через вал 13 повертає вниз балки уловлювачі 16.які звільнюють нижні штанги паралелограмної підвіски 15 датчиків 18. Датчики опускаються в міжряддя і одночасно важелі вилок – уловлювачів натягують приєднані до них пружини, які притискають датчики до поверхні грунту.
В робочому положенні масло з гідронасоса 34 через насос-дозатор 71 трубопроводи 3 підводиться до золотника 31. В нейтральному положенні золотника масло по трубопроводу 33 поступає на злив. Якщо в процесі руху машина відхиляється , наприклад, вправо від осі рядка, датчики під дією рядків повернуться вліво.
Одночасно з поворотом керованих коліс через кронштейн 30 жорстко зв’язаних з корпусом гідроциліндра керування, зміщує корпус золотника в тому ж напрямі, в якому раніше перемістився плунжер. Золотник повертається в нейтральне положення і поворот коліс припиняється .
При відхиленні машини вліво від рядків автомат водіння забезпечує поворот коліс в протилежну сторону. Тобто в сторону направлення траєкторії руху, тим на більший кут відхиляються датчики копіювального пристрою і відповідно на більший кут повертаються керовані колеса. Пропорційність кута повороту направляючих коліс куту відхилення датчиків забезпечується передаточним відношенням, утворений прямим і зворотним зв’язком. Коефіцієнт пропорційності знаходиться відношенням плечей важелів 14 і 20 прямого зв’язку, здійснюється через важіль 22, силовий циліндр 29 до кронштейна золотника 30 зворотнього зв’язку.
В прямому зв’язку здійснюється передаточним механізмом , передбачена можливість зміни прередаточного коефіцієнта внаслідок довжини плеча ричага 14. Для цього в важелі 14 є два отвори які може переставлятися регульована тяга 19. Так, якщо зменшити довжину плеча ричага переставте тягу 19 на ближчий отвір ричага 14 то відхилення датчиків буде відповідати меншому зміщенню плунжера золотника. А значить і менший поворот керованих коліс, тобто коефіцієнт пропорційності зменшиться.
Необхідність зміни коефіцієнта зв’язана з тим, що в залежності польових умов швидкості коренезбиральної машини може змінюватися, але так як час обробітку автоматом керування вхідного сигналу залишається постійним, при підвищенні швидкості керування колеса необхідно повернути на великий кут, щоб машина встигла захоплювати збирємі рядки, тобто необхідно коефіцієнт пропорційності збільшити.
При русі коренезбиральної машини вздовж гонів можуть виникати великі відхилення датчиків, в зв’язку з утриманням різких поворотів.
В даному випадку втулка являється фільтруючим елементом, який пропускає вхідні сигнали тільки в робочому діапазоні. В процесі роботи коренезбиральної машини можлива ситуація одночасної роботи автомата водіння і рульового управління. Наприклад, для утримання поїзда коли несподівано появилася перешкода перед машиною. В тому випадку водій різко повертає рульове колесо в необхідну сторону, вмикається насос – дозатор 7, який направляється в необхідну порожнину гідроциліндра 29 потік масла. Так як кут повороту рульового колеса обмежений, при обмеженому відхиленні датчиків орієнтації, верхніми сумішами вилок-вловлювачів поршень силового гідроциліндра може зменшитися на достатню величину і відповідно повернути рульовим колесом. Таким чином машина керується рульовим колесом без включення автомата водіння. Точність руху коренезбиральної машини вздовж міжрядь залежить від багатьох факторів. Наприклад, поперечні схили поля або не одинакові по ширині заглиблення копачів можуть визвати зміщення машини вліво або вправо відповідно збираючих рядків. Тоді виникає необхідність використовувати роботу автомата водіння. Це здійснюється слідуючим чином: при необхідності коректування руху машин (в зв’язку її руху зі зміщенням) водій повертає рульове колесо 6, діє на насос – дозатор 7, який нагнітає масло в трубопроводи 4 і 5, зміщує вліво або вправо шнек силового гідроциліндра, тоді на відповідний кут в сторону розбіжності траєкторії руху, повертаються керовані колеса і машина повернеться в попереднє положення.
При переведенні робочих органів в транспортне положення одночасно шток гідроциліндра 12 через вал переключення 13 вилками-вловлювачами 16 піднімає датчики 18. При цьому верхні штанги крайніх паралелограм них підвісок 15 щільно заходять у вилки-фіксатори 17. В цьому положенні передавальний механізм (через важелі 14 і 20 тяги 19 і 21) фіксує в нейтральному положенні золотника 31 і відповідно поршень управління 27 стає в середньому положенні.
Таким чином, при переводі датчиків орієнтації в транспортне положення відключається вплив автомата водіння на керування машиною.
При транспортних переїздах шофер користується рульовим керуванням. Повороту рульового колеса вліво або вправо насосом-дозатором 7 і через трубопроводи 4 і 5 потік масла направляється від насосної установки вліво або вправо порожнину силового гідроциліндра 29. При цьому шток через ричав 32 повертається у відповідну сторону керуючи колесо машини. При ручному управління, коли спрацьовує гідроциліндр 27, який через кронштейн 30 передається на корпус золотника. При зміщенні корпуса вправо відносно закріпленого нерухомого золотника через трубопровід 23 включається подача масла в ліву порожнину гідроциліндра керування і його корпус повернеться знов в середнє положення. Так, як холостий хід золотника в нейтральному положенні менше 1 мм, то зміщення корпуса гідроциліндра керування не буде перевищувати 1мм.
Таке мале зміщення корпуса гідроциліндра незамінне при рульовому керуванні машини.
Якщо порушується фіксація плунжера золотника (наприклад через поломку копіювального пристрою, або передавального механізму), то хід корпуса гідроциліндра керування обмежується втулкою 23 в межах ±25 мм. В цьому випадку відповідно збільшується холостий хід рульового колеса, проте керування машиною буде забезпечуватися. При виході з ладу (вимиканні) двигуна або при відсутності подачі масла через несправності гідросистеми керування машиною можливо шляхом ручної перекачки масла насосом-дозатором (обертанням рульового колеса) з одної порожнини силового гідроциліндра 23 в другу по трубопроводам 4 і 5. Проте в цьому випадку ручне керування машиною ускладнюється, так як зусилля обертання рульового колеса зростає в 10 раз. Необхідно вирахувати, ще при будь - яких несправностях автомати керування рекомендується користуватися рульовим управлінням тільки для транспортних переїздів машини до місця ремонту, якщо автомат водіння не піддається ремонту, його необхідно демонтувати. Окрім насосної установки і спарених гідроциліндрів. При цьому штуцери гідроциліндра 27 необхідно заглушити заглушками. Як виходить з принципу роботи автомата водіння перевід в режим слідкування або транспортний режим здійснюється автоматично, одночасно з переводом робочих органів машини, а вмикання в роботу рульового управління не потребує додаткових операцій, що створює переваги в експлуатації автомата керування.
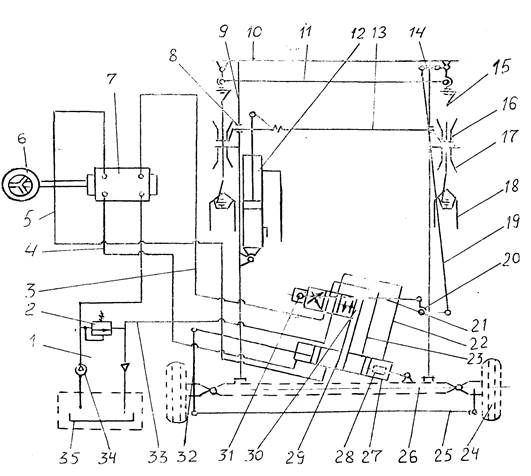
Рис.4.Гідрокінематична схема автомату водіння КС-6Б.
1, 3, 4, 5, 22, 23, 30, 33 – трубопроводи; 2-запобіжний клапан; 6-рульове колесо; 7-насос-дозатор; 8-опора вала; 9-поздовжній брус рами; 11-поперечна тяга; 12, 27, 29 – гідроциліндри; 13-вал переключення; 14-переставляючий важіль; 15-паралелограмна підвіска; 16-вилка уловлювач; 17-вилка фіксатор; 18-датсик; 19, 21, 25 – тяги; 20, 32 – ричаги; 24-керуюче колесо машини; 26-балка керуючого моста; 28-втулка обмеження; 30-кронштей золотника; 31-золотник; 34-гідронасос; 35-масляний резервуар.
Автомат водіння по рядках РКС-6.
Автомат водіння представляють собою гідромеханічний пристрій, призначений для автоматичного направлення викопуючих робочих органів машини по осі рядків цукрового буряка. Базовою лінією для копіюючих органів автомата є рядки коренів буряків з обрізною гичкою.
В автомат водіння входять слідуючи основні елементи: рама, датчики копіри, золотник керування коліс, важільна система, гідроциліндр підйому копірів і капот .
Автомат водіння комплектується двома типами датчиків: копіри – рихлячі і полозкові копіри .
Копіри - рихлячі приміняються на важких ґрунтах і в основному коли головки коренів знаходяться на рівні і нижче поверхні ґрунту.
Колоскові копіри застосовують при підвищеній вологості ґрунту і коли головки коренів виступають над поверхнею ґрунту на 15...20 мм.
Копіри кріпляться на паралелограмних підвісках , які через поперечну тягу і сумуючий важіль зв’язані з пальцями золотника керування коліс. Всі вузли автомата водіння змонтовані на рамі , яка при допомозі двох фланців кріпиться до основної рами машини. Зверху всі механізми закриті капотом .
Автомат водіння працює слідуючим чином. При русі машини в загонці датчики-копіри своїми перами торкаються головок коренів буряка. У випадках відхилення керуючих коліс від осі міжряддя, а також викопуючих вилок між рядками буряків, копіри зміщуються від середнього положення і через важільну систему переміщується золотник керування коліс. При цьому масло поступає в ту чи іншу порожнину гідроциліндра керуючих коліс, який повертає колеса машини в потрібну сторону.
В режимі автоматичного водіння, зазори повинні бути в межах 1...1,5 мм, а зазори А – не менше 30 мм при повністю витягнутому штокові гідроциліндра. Необхідний зазор збивається установкою стійки-датчика копіра в стійко тримачі паралелограмної підвіски на максимальну її довжину.
При роботі автомата водіння можливо коректування напрямку руху машини шляхом дії на кермо.
Переведення датчиків-копірів з транспортного положення в робоче і навпаки здійснюється гідроциліндром і валом піднімання з робочого місця тракториста-машиніста.
При далеких транспортних переїздах зазори „Б” необхідно ліквідувати рівномірне підтискування болтів зверху і знизу, а тягу зворотнього зв’язку переставити на внутрішній отвір важеля, при цьому датчики-копіри підняти в крайнє верхнє положення в тримання стояків паралелограмного механізму.
Дата добавления: 2015-03-26; просмотров: 1795;