АВТОМАТИЗАЦИЯ АППАРАТОВ ИВЛ БЕЗ ИСПОЛЬЗОВАНИЯ БИОЛОГИЧЕСКОЙ ИНФОРМАЦИИ
В предыдущих главах подчеркивалось, что, с одной стороны, аппараты ИВЛ работают в условиях значительных изменений нагрузки, вызванных как широким разбросом характеристик пациента (растяжимость легких, сопротивление дыхательных путей, степень герметичности присоединения к аппарату), так и их изменением в процессе применения ИВЛ у одного пациента. С другой стороны, уже было показано, что стабильность поддержания в этих условиях установленного режима вентиляции является важным потребительским качеством аппарата ИВЛ. Недостаточная стабильность приводит к необходимости постоянного контроля за взаимодействием системы аппарат — пациент, частей коррекции установленных параметров ИВЛ по клиническим показателям или показателям многочисленных контрольно-измерительных приборов и т.п. Другими словами, анестезиолог или реаниматолог значительное время тратит на аппаратуру, а не на слежение за пациентом. Наилучшим решением этой задачи было бы автоматическое поддержание заданного газового состава крови. Однако, как уже указывалось выше, создание таких аппаратов ИВЛ чрезвычайно сложно. В связи с этим находят все большее применение «местные» системы автоматического управления, главное назначение которых — компенсация упомянутых выше и других дестабилизирующих факторов. Технические решения, стабилизирующие режим работы аппарата ИВЛ, достаточно многообразны. Например, в отечественных аппаратах «Фаза», «Вдох» и «Спирон» в канале регулирования минутной вентиляции используется стабилизатор перепада давления на регулирующем дросселе, что позволяет получить заданную величину вентиляции (на выходе аппарата) при колебаниях нагрузки или производительности генератора вдоха. Другой пример использования пневматических автоматических устройств — стабилизаторы давления питания, получившие широкое распространение в аппаратах ИВЛ с пневмоприводом.
Успехи электронной, в том числе микропроцессорной, техники расширили возможности автоматических систем, стабилизирующих режим работы. Здесь можно отметить применение в аппарате «Пневмотрон-80» переключение на выдох после подачи в линии вдоха заданного объема газа, поддержание заданной минутной вентиляции при сочетании самостоятельной и искусственной вентиляции в аппарате «Энгстрем-Эрика», а также стабилизацию заданной величины минутной вентиляции с помощью измерения ее действительного значения в линии выдоха [Гальперин Ю.С., Кантор П.С., 1983]. Электронная элементная база позволяет также применять системы автоматического регулирования и для контроля других характеристик аппаратов ИВЛ. Так, в аппарате «Сервовептилятор-900» обеспечивается управление формой кривой вдувания газа, а также величиной максимальной скорости выдыхаемого газа. О необходимости таких систем можно спорить, однако несомненно, что такого рода аппараты представляют особый класс аппаратуры ИВЛ, важнейшей особенностью которых является слияние собственно аппаратов с различными измерительными средствами, наличие других блоков, характерных для замкнутых систем автоматического регулирования — задающе-сравнивающего устройства, регулятора, исполнительного механизма и обратной связи.
К автоматическим устройствам другого плана можно отнести, например, устройства, обеспечивающие переключение аппарата с вспомогательной на управляемую вентиляцию в случае прекращения дыхательных усилий пациента, автоматический переход на вспомогательную вентиляцию с управляемой вследствие появления дыхательных усилий и т.п. Здесь же, пожалуй, следует упомянуть и многообразные средства сигнализации тех или иных аварийных ситуаций в системе аппарат — пациент.
Качественное изменение автоматизации аппаратов связано с внедрением в них микропроцессорных систем управления. Основным преимуществом аппаратов этого класса является их функциональная гибкость. Еще одной важной функцией является совмещение внутренних систем управления аппаратом с осуществлением слежения за состоянием пациента, сигнализацией опасных ситуаций или отклоняющихся от установленных врачом граничных условий ИВЛ, представление этой информации в алфавитно-цифровой и графической форме, запоминание с возможностью последующего воспроизведения на дисплее информации, существовавшей некоторое время до начала нежелательной ситуации в системе аппарат — пациент. Микропроцессорное управление аппаратами ИВЛ наряду с некоторыми конструктивными особенностями аппаратов позволяет быстро реализовать в аппаратах этого класса новые функциональные возможности, необходимость в существовании которых появляется с приобретением медицинского опыта ИВЛ в результате интенсивно ведущихся в этом направлении научных исследований, и, таким образом, существенно сократится период, необходимый на внедрение новых медицинских методик в клиническую практику.
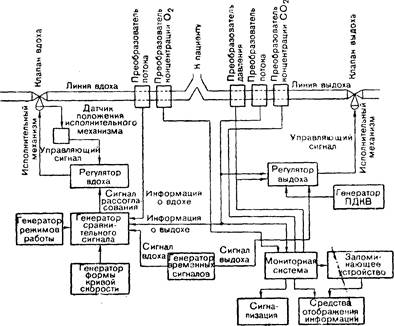
28. Функциональная блок-схема аппарата ИВЛ с автоматическим управлением без использования биологической информации. Объяснение в тексте.
Существует большое количество различных аппаратов ИВЛ с реализацией такой системы управления «Энгстрем-Эрика» (Швеция), «Дрегер-Ева» (ФРГ), «Система» (Испания), аппарат для детей фирмы «СЛЕ» (Великобритания) и др. Ведутся разработки подобных систем и в СССР. Рассмотрим их обобщенную функциональную схему (рис. 28) с тем, чтобы продемонстрировать возможности и задачи, выполняемые в аппаратах такого типа. Схема относится к аппарату ИВЛ с генератором постоянного потока и демонстрирует основные особенности применения систем автоматического управления.
Регулятор вдоха, получая через генератор сравнительного сигнала информацию о заданном и действительном значениях минутной вентиляции, измеренных в линии выдоха, поддерживает при помощи клапана вдоха такой поток газа на вдохе, чтобы установленная минутная вентиляция не отличалась от измеренной, несмотря на изменение нагрузки на аппарат и негерметичностн соединения аппарата с пациентом. Задаваемый (генератором формы кривой скорости) сигнал сравнивается с действительной формой скорости, измеренной в линии вдоха, передается через регулятор вдоха, получающий также информацию о положении исполнительного механизма клапана вдоха, в результате чего регулятор вдоха управляет клапаном вдоха так, чтобы обеспечивалась заданная форма кривой скорости вдувания. Регулятор выдоха, аналогично регулятору вдоха, управляет клапаном выдоха, получая для своей работы информацию о значении минутной вентиляции, требуемой величине давления конца выдоха от генератора ПДКВ, действительном значении давления и временных характеристиках выдоха.
Информация от преобразователей потока, давления, концентрации Рсо2 и O2 поступает в мониторную систему, которая вырабатывает сигналы для системы сигнализации в случае, если параметры вышли за пределы установленных значений, передает эту информацию в запоминающее устройство и на средство отображения информации.
Возможности микропроцессорного управления далеко не исчерпываются данной схемой. Актуальной задачей является обоснование необходимой адекватности технических возможностей использования аппарата ИВЛ в конкретной области применения.
Дата добавления: 2015-03-09; просмотров: 3191;