И РАСПОЗНАВАНИЕ ОБЪЕКТОВ В ОБЛАКАХ ТОЧЕК.
Значительно больший объем информации по сравнению с плоскими изображениями несет в себе описание объектов в 3D пространстве. Оно позволяет увеличить достоверность сцен, упростить процедуры распознавания и т. п.
Наиболее широко используется многоточечное структурное освещение, заключающееся в дискретном представлении светового сигнала в виде двухмерной матрицы гауссовых пучков, сформированной при помощи киноформных элементов, например, двух скрещенных решёток Даманна. Распределение светового потока J(x,h) в многоточечном структурном освещении описывается суперпозицией гауссовых пучков с равными интенсивностями:
 ,
,
где x, h – координаты в поперечном сечении энергетических центров гауссовых, в частности, лазерных пучков, N, М – число пучков вдоль осей x и h соответственно; ∆x , ∆h- расстояния между центрами пучков; σ - полуширина гауссовых пучков (σ<<∆x , σ<<∆h). При этом, во всем диапазоне DX ≈ N∆x, DY ≈ М∆h наблюдается "равномерное" освещение в выделенных точках, и, благодаря малой расходимости лазерных пучков, реализуется "глубокий" измерительный объем – DZ » DY » DX.
На объекте и на изображении, регистрируемом фотоприемной матрицей, параллельные световые пучки создают картину деформированных световых пятен. Для нахождения пространственных параметров объекта используется следующая последовательность действий. Сначала из анализа растрового изображения находятся энергетические центры световых пятен. Затем производится идентификация "световых пятен" по отношению к "световым пучкам", что означает поиск индексов смещения соответствующего пучка по двум ортогональным направлениям в матрице источника. При известных величинах ∆x, ∆h, индексы смещения однозначно задают пространственные уравнения лучей освещения. Одновременно, координаты центров световых пятен и параметры, найденные в процессе калибровки, определяют уравнения лучей наблюдения. Для двух лучей – освещения и наблюдения (ti и to) всегда можно определить параметры ЗD-отрезка, соответствующего минимальному расстоянию между ними. Середина найденного отрезка соответствует освещенной точке на поверхности объекта, а его длина определяется точностными характеристиками системы. Далее, полученный набор пространственных координат дискретных точек позволяет восстановить форму поверхности. Последовательность операций представлена ниже:
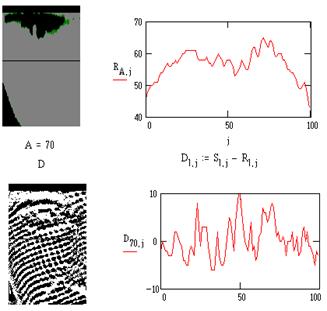
Рис.КСР.1. Оцифрованные изображения человеческого лица и их яркостные срезы
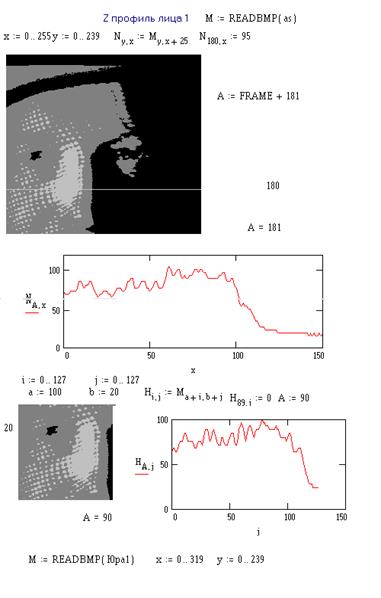
Рис.КСР.2. Предварительное препарирование изображения лица человека
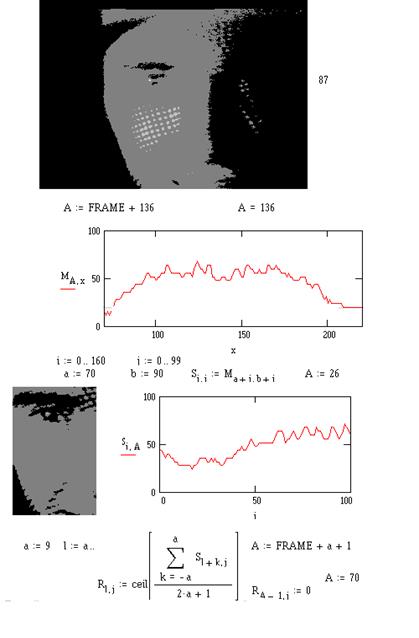
Рис.КСР.3. Предварительное сглаживание изображения лица человека
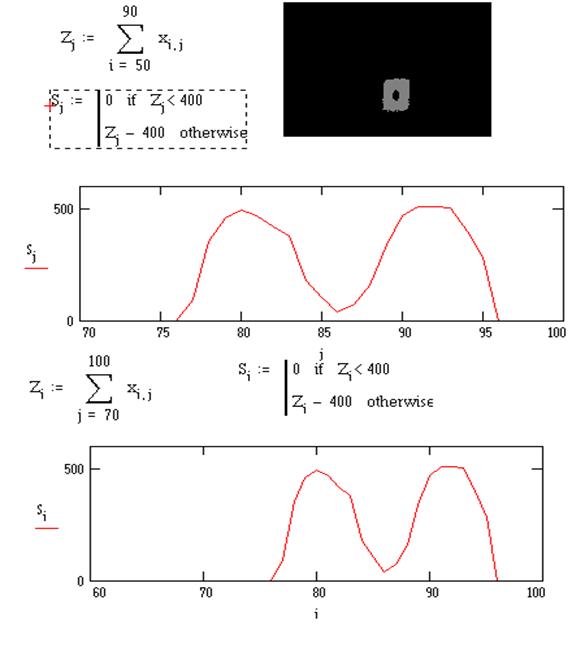
Рис.КСР.4. Операции по обработке сигналов

Рис.КСР.5. Определение пространственных координат отклика зонда
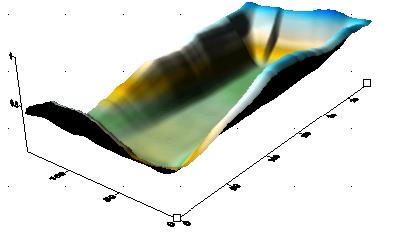
Рис.КСР.6. Вид поверхности полигона
Сегодня будущее инженерии ее идеологические принципы ориентируются на методы и использование возможностей 3-D проектирования. Компьютерная технология 3D проектирования - основной и единственный инструмент качественного и быстрого воплощения человеческих идей в реальную конструкцию. Освоение и развитие 3-D технологий, охватывающих все этапы жизненного цикла технических объектов, позволит достичь значительных результатов в сокращения сроков их создания.
Данные лазерного сканирования и работа с цифровыми моделями рельефа разных форматов предполагает знакомство с аэротриангуляцией, методами построение стереоизображений, моделирование рельефа. В приложении к КСР достаточно файлов описания точек облаков, как искусственных так и естественных, полученных со сканеров.
Дата добавления: 2015-03-23; просмотров: 1721;