ЛЕКЦИЯ 12
 |
При решении задач проектирования и управления промышленными роботами приходится определять как положения его звеньев относительно неподвижной системы координат (абсолютные положения звеньев), так и их относительные положения (например, обобщенные координаты). Соответственно эти задачи известны в робототехнике как прямая и обратная задачи о положениях.
|
 обычно связывается со стойкой, а с каждой кинематической парой связывается подвижная система координат, одна из осей которой связана с характерными признаками звена, например осевой линией. Для
обычно связывается со стойкой, а с каждой кинематической парой связывается подвижная система координат, одна из осей которой связана с характерными признаками звена, например осевой линией. Для
|
 , (или
, (или  ) четырехзвенной открытой кинематической цепи из звеньев 1, 2, 3, 4, моделирующей структуру руки человека (см. рис. 24.2, б). Ось
) четырехзвенной открытой кинематической цепи из звеньев 1, 2, 3, 4, моделирующей структуру руки человека (см. рис. 24.2, б). Ось  направляют вдоль оси кинематической пары, а ось
направляют вдоль оси кинематической пары, а ось  дополняет правую систему координат
дополняет правую систему координат 
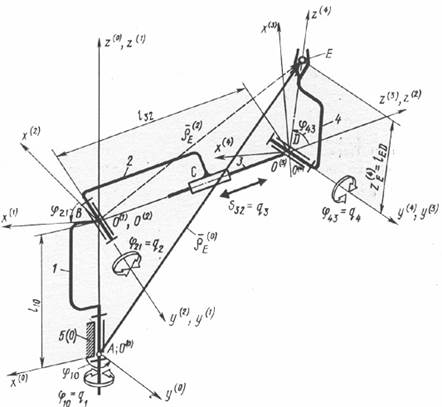
Применение метода преобразования координат для решения прямой задачи о положениях проиллюстрируем на примере кинематической схемы промышленного робота (рис. 25.1). Четыре подвижных звена 1, 2, 3 и 4 образуют четыре одноподвижные пары, из которых три вращательные и одна поступательная. Число степеней подвижности робота равно четырем:

Поэтому для решения прямой задачи о положениях должны быть заданы четыре обобщенные координаты: относительные углы поворота звеньев  и относительное перемещение вдоль оси звена 3
и относительное перемещение вдоль оси звена 3  (рис. 25.1).
(рис. 25.1).
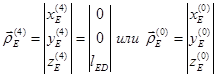
Требуется определить радиус-вектор  точки Е схвата относительно неподвижной системы координат
точки Е схвата относительно неподвижной системы координат  , связанной со стойкой 5 (или 0). Оси систем координат ориентированы относительно элементов кинематических пар следующим образом:
, связанной со стойкой 5 (или 0). Оси систем координат ориентированы относительно элементов кинематических пар следующим образом:
ось  неподвижной системы координат стоики направлена вдоль оси вращательной пары А;
неподвижной системы координат стоики направлена вдоль оси вращательной пары А;
со звеном 1 связана система  , имеющая смещение
, имеющая смещение  начала координат
начала координат  вдоль оси
вдоль оси  . Ось совпадает с осью , а ось
. Ось совпадает с осью , а ось  направлена по оси вращательной кинематической пары В;
направлена по оси вращательной кинематической пары В;
со звеном 2 связана система  , имеющая начало координат совпадающее с точкой
, имеющая начало координат совпадающее с точкой  . Ось
. Ось  совпадает с осью т. е. с осью вращательной кинематической пары В;
совпадает с осью т. е. с осью вращательной кинематической пары В;
начало координат системы  имеет смещение
имеет смещение  относительно точки вдоль оси
относительно точки вдоль оси  . Ось
. Ось  выбрана совпадающей с осью ;
выбрана совпадающей с осью ;
координата  точки Е схвата 4 задана в системе
точки Е схвата 4 задана в системе  , ось
, ось  которой направлена по оси вращательной кинематической пары D.
которой направлена по оси вращательной кинематической пары D.
Для определения радиуса-вектора  необходимо разрешить матричное уравнение перехода к системе координат :
необходимо разрешить матричное уравнение перехода к системе координат :
 (25.1)
(25.1)
Достоинство метода проявляется в случае специального выбора подвижных систем координат. Если координатные оси совмещать с осью вращательной пары или направлением поступательной пары, то матрицы перехода существенно упрощаются.
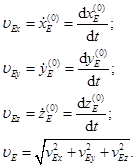
Координаты точки Е в трехмерном пространстве записываются в виде столбцевых матриц:
Здесь  - матрица перехода от системы к системе (элементарная матрица поворота вокруг оси z и перемещения вдоль оси z):
- матрица перехода от системы к системе (элементарная матрица поворота вокруг оси z и перемещения вдоль оси z):
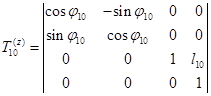 ;
;
 - матрица перехода от системы к системе (элементарная матрица поворота относительно оси y):
- матрица перехода от системы к системе (элементарная матрица поворота относительно оси y):
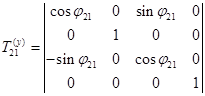 ;
;
 - матрица перехода от системы к системе (элементарная матрица перемезения вдоль оси x):
- матрица перехода от системы к системе (элементарная матрица перемезения вдоль оси x):
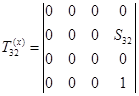 ;
;
 - матрица перехода от системы к системе (элементарная матрица поворота вокруг оси x):
- матрица перехода от системы к системе (элементарная матрица поворота вокруг оси x):
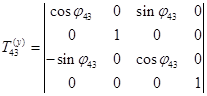 .
.
Подставив эти матрицы в формулу (25.1), получим координаты точки Е в системе . Развернутые формулы, определяющие положение точки Е схвата, ввиду громоздкости не приведены. При решении конкретных задач на ЭВМ целесообразно воспользоваться библиотекой стандартных подпрограмм для выполнения элементарных операций с матрицами.
Для определения скорости и ускорения точек звеньев пространственных механизмов манипуляторов при использовании метода преобразования координат имеют в виду, что радиус-вектор  , например, точки Е есть векторная функция обобщенных координат:
, например, точки Е есть векторная функция обобщенных координат:

поэтому скорость  точки Е определяется по соотношению
точки Е определяется по соотношению
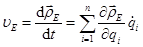 , (25.2)
, (25.2)
или
 (25.3)
(25.3)
Абсолютную угловую скорость j-го звена относительно стойки находят сложением угловых скоростей при относительном движении звеньев:
 (25.4)
(25.4)
индекс i(i - 1) указывает на порядковые номера звеньев, участвующих в относительном движении, например

Решения обратных задач о положениях манипуляторов в явном виде имеют важное значение как при проектировании, так и при управлении. При проектировании такие решения позволяют оценить влияние конструктивных параметров на процесс движения, при управлении - построить быстродействующие алгоритмы управления.
Контрольные вопросы к лекциям 24, 25
1. Что такое манипулятор, автооператор, промышленный робот?
2. Для чего предназначены промышленные роботы?
3. В чём заключаются особенности структуры кинематических цепей манипуляторов промышленных роботов?
4. От чего зависят двигательные возможности манипулятора промышленного робота?
5. Что такое подвижность манипулятора ? Как она определяется?
6. Дайте определение рабочего пространства, зоны обслуживания манипулятора и его маневренности (на любом примере)
ЛЕКЦИЯ 12
Дата добавления: 2015-03-14; просмотров: 925;