Определение степени свободы и геометрической неизменяемости плоских систем
В строительной механике при решений задач расчета реальных сооружений на прочность, жесткость и устойчивость вместо самого сооружения рассматривается его упрощенное изображение, свободное от второстепенных, не играющих существенной роли в работе сооружения факторов, называемое расчетной схемой. В дальнейшем для краткости расчетную схему будем называть сооружением и ограничимся рассмотрением лишь сооружений в виде плоских систем, составленных из отдельных элементов, связанных между собой. Такие системы могут воспринимать нагрузку лишь в том случае, если они сохраняют заданную им при возведении внутреннюю структуру, т. е. геометрическую форму и положение. Изменяемые системы не в состоянии уравновесить внешние силы и под их действием приходят в движение, меняют свою форму. Естественно, что такие системы нельзя использовать в качестве сооружений. Другими словами, сооружение должно быть структурно, или геометрически неизменяемым (т.е.изменение его формы возможно лишь за счет деформации элементов) и неподвижным относительно основания. Для выяснения того, обладает ли данная система этой способностью, какими условиями она обеспечена, а также для уяснения роли, которую играют отдельные элементы в работе сооружения, служит кинематический анализ, который должен предшествовать расчету.
Изменяемость внутренней структуры и подвижность сооружения относительно основания характеризуются его степенью свободы – числом независимых геометрических параметров, определяющих положение всех элементов сооружения. Поэтому кинематический анализ сооружения начинается с определения его степени свободы.
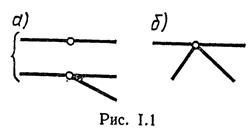 Каждый структурно (геометрически) неизменяемый элемент сооружения, называемый диском, имеет на плоскости три степени свободы, так как он может перемещаться поступательно в двух направлениях и поворачиваться вокруг любой точки. Простейшим диском является стержень. Для обеспечения неизменяемости структуры и неподвижности сооружения диски соединяют различными устройствами, ограничивающими степень свободы. Всякое устройство, отнимающее у тела одну степень свободы, называется кинематической связью. В качестве связей используют шарниры и опоры. Шарниры бывают простыми (рис.1.1,а) и кратными (рис.1.1,б). Простой шарнир соединяет два диска, кратный — более двух и эквивалентен (п — 1) простым шарнирам, где п - число соединяемых дисков. Каждый простой шарнир эквивалентен двум связям, так как препятствует любым двум взаимным линейным смещениям двух дисков, оставляя возможность взаимного их поворота. Различают следующие типы расчетных схем опор (рис. 1.2): а - цилиндрическая подвижная, или шарнирно подвижная, б - цилиндрическая неподвижная, или шарнирно неподвижная,
Каждый структурно (геометрически) неизменяемый элемент сооружения, называемый диском, имеет на плоскости три степени свободы, так как он может перемещаться поступательно в двух направлениях и поворачиваться вокруг любой точки. Простейшим диском является стержень. Для обеспечения неизменяемости структуры и неподвижности сооружения диски соединяют различными устройствами, ограничивающими степень свободы. Всякое устройство, отнимающее у тела одну степень свободы, называется кинематической связью. В качестве связей используют шарниры и опоры. Шарниры бывают простыми (рис.1.1,а) и кратными (рис.1.1,б). Простой шарнир соединяет два диска, кратный — более двух и эквивалентен (п — 1) простым шарнирам, где п - число соединяемых дисков. Каждый простой шарнир эквивалентен двум связям, так как препятствует любым двум взаимным линейным смещениям двух дисков, оставляя возможность взаимного их поворота. Различают следующие типы расчетных схем опор (рис. 1.2): а - цилиндрическая подвижная, или шарнирно подвижная, б - цилиндрическая неподвижная, или шарнирно неподвижная,
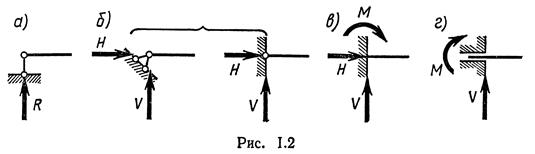
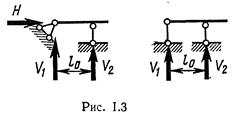 в - защемляющая неподвижная, или жесткая заделка, г - защемляющая подвижная, или скользящая заделка, эквивалентные соответственно одному, двум, трем и двум опорным стержням, в каждом из которых действует опорная реакция. На рис. 1.3 показаны шарнирно-стержневые эквиваленты жесткой и скользящей заделок. Здесь расстояние l0 называется глубиной заделки, а произведение V2l0= М — опорным моментом или моментом в заделке. Каждый опорный стержень эквитвалентен одной связи, так как препятствует перемещению диска в направлении стержня.
в - защемляющая неподвижная, или жесткая заделка, г - защемляющая подвижная, или скользящая заделка, эквивалентные соответственно одному, двум, трем и двум опорным стержням, в каждом из которых действует опорная реакция. На рис. 1.3 показаны шарнирно-стержневые эквиваленты жесткой и скользящей заделок. Здесь расстояние l0 называется глубиной заделки, а произведение V2l0= М — опорным моментом или моментом в заделке. Каждый опорный стержень эквитвалентен одной связи, так как препятствует перемещению диска в направлении стержня.
Из сказанного выше следует, что степень свободы W сооружения, состоящего из Д дисков, соединенных Ш простыми шарнирами и имеющего С0 опорных стержней, может быть определена по формуле П.Л.Чебышева:
W = 3Д — 2Ш — С0. (1.1)
Для определения числа Д необходимо предварительно отбросить все шарниры и опоры, а для определения числа Ш — все опоры.
Для шарнирно-стержневых систем (ферм), т. е. систем, состоящих из стержней, соединенных между собой по концам шарнирами (причем каждый стержень прикрепляется к соседним только двумя шарнирами), степень свободы может быть определена по более простой формуле:
W = 2У – С – С0, (1.2)
где У — число узлов фермы; С — число внутренних стержней фермы; Со — число опорных стержней. Эта формула получена исходя из того, что каждый узел, как точка, имеет на плоскости две степени свободы, а каждый стержень, соединяющий два узла, или опорный эквивалентны одной связи, так как налагает на координаты этих точек единственное условие — постоянство расстояния.
Степень свободы системы, не имеющей опорных стержней, складывается из двух частей: степени изменяемости внутренней структуры системы и степени подвижности ее относительно основания, которая равна трем. Обозначая степень изменяемости структуры системы через И, можно записать
И = W – 3 = 3Д – 2Ш – 3 (1.3)
или для шарнирно-стержневых систем
И = 2У – С – 3 (1.4)
Для системы, имеющей опорные стержни, не делают различия между степенью свободы и степенью изменяемости, рассматривая основание в качестве диска, связанного с сооружением опорными стержнями.
При определении степени свободы или степени изменяемости системы возможны следующие три качественно различных результата:
1. W > 0 или И > 0 — система структурно изменяемая, так как не имеет достаточного количества связей. Система, для которой W = 1 или И = 1, называется механизмом.
2. W = 0 или И = 0 — система обладает необходимым минимумом связей, чтобы быть неподвижной и неизменяемой.
3. W < 0 или И < 0 — система имеет лишние связи.
Аналитические условия W ≤ 0 или И ≤ 0 являются необходимыми, но недостаточными для суждения о неизменяемости и неподвижности сооружения, так как эти характеристики зависят не только от числа связей, наложенных на диски, но и от их расположения. Для того чтобы узнать, является ли сооружение действительно неизменяемым и неподвижным, а также выяснить, какую роль играют отдельные элементы в его работе, необходимо произвести анализ структуры сооружения, для чего нужно знать принципы образования структурно неизменяемых систем. Перечислим основные из них:
1. Присоединение к неизменяемой системе двухстержневого звена (диады) не изменяет степени свободы системы (рис. 1.4, а).
2. Два диска могут быть соединены жестко с помощью шарнира С и стержня АВ, ось которого не проходит через центр шарнира (рис. 1.4, б).
3. Два диска могут быть соединены жестко тремя стержнями, непересекающимися в одной точке и, следовательно, не параллельными (рис. 1.4, в). Этот принцип может быть сведен к предыдущему, поскольку два стержня всегда могут быть заменены фиктивным шарниром, расположенным в точке пересечения этих стержней.
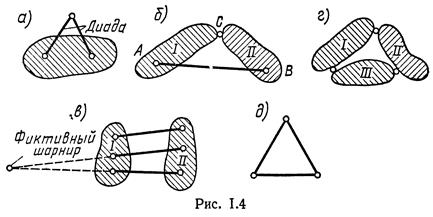
4. Три диска можно соединить жестко с помощью трех шарниров, не лежащих на одной прямой (рис. 1.4, г).
Все перечисленные принципы могут быть сведены к одному: шарнирно-стержневой треугольник (рис. 1.4, д) — фигура структурно, т. е. геометрически, неизменяемая.
Дата добавления: 2014-12-08; просмотров: 13138;