Применение моделирования при расчётных исследованиях процессов движения электромобилей
По существу, на всех этапах разработки и освоения производства электромобиля возникает необходимость в оперативной оценке и обосновании вариант общих и частных технических решений в режимах совместной и автономной работы ИТ, с учетом параметров электродвигателя (ЭД) и силовой передач способов регулирования скорости движения и ряда других особенностей конструкции, касающихся вопросов периодичности обслуживания и условий эксплуатации.
Необходимым и достаточным условием конкретных решений возникающих задач могут быть применение моделирования и расчётные исследования процессов движения ЭМ с вариацией требуемых параметров или характеристик систем и их элементов.
Основу программы моделирования составляет решение следующей базов системы дифференциальных уравнений движения ЭМ, приведённых к якорю ЭД с независимым возбуждением (в необходимых случаях с введением отрицательной обратной связи по отклонению скорости от заданного значения по городскому циклу):
где φя − угол поворота якоря, рад;
ωя − угловая скорость, рад/с;
Uв, iв, rв, Lв − напряжение, В, ток, А, сопротивление, Ом, и индуктивность, Гн, обмотки возбуждения (ОВ) ЭД;
Uи,т − напряжение, В, источника тока в режимах автономной и совместной работы с учетом значений ЭДС и внутренних сопротивлений ИТ типа «металл-воздух» и АБ (учтено влияние уровня тока, глубины разряда и других условий), рассчитанное на основе теории цепей;
Uрв, Uря − напряжения, В, при двухзонном регулировании по цепи ОЕ якоря ЭД (в импульсном или резистивном режимах работы);
iя, гя, и Lя − ток, А, сопротивление, Ом, и индуктивность, Гн, в цепи якоря ЭД;
КФс (КФм) − магнитный поток ОВ, Вб;
Jпр − приведённый момент инерции, кг∙м2, ЭМ, и его вращающихся масс;
∑Mс − сумма моментов, Н.м, сопротивления движению ЭМ с учётом его веса, угла подъема и качества шин и дороги, сил сопротивления воздуха, торможения и др.
Конкретные значения параметров и функциональные зависимости вводятся и могут быть изменены в приведённой базовой системе четырёх уравнений в соответствии с исходными данными проекта и последующими корректировками характеристик составных элементов системы, условий движения и опытными данными, полученными по мере разработки модели ЭМ.
Базовая система этих дифференциальных уравнений решается методом Рунге-Кутта 4-го порядка, по десяти подпрограммам на языке «Квик-Бейсик» с общим объёмом до 100 Кбайт. Машинное время расчёта одного варианта составляет 10-15 мин, с последующей распечаткой исходных данных и результатов в виде таблиц и графиков токов, напряжений, скоростей движения ЭМ во времени, а также энергетических показателей и параметров.
Результаты моделирования в основном соответствуют данным, полученным при испытаниях электромобилей. К особенностям программы следует отнести её построение на общих положениях, справедливых для любого состава систем электромобиля, а также режимов его движения, регулируемых обратными связями по скорости вращения тягового ЭД. Например, без изменения базовой программы исследуются режимы движения ЭМ по различным городским циклам (НАМИ-1, НАМИ-2, SAE,'циклам ISO и др.), а также с постоянными скоростями (режим приводится в ряде публикаций) или при максимальной мощности, развиваемой тяговым ЭД с последовательным или независимым возбуждением. Ряд специализированных программ составлен на общей основе применительно к грузопассажирским и легковым электромобилям, малым транспортным средствам различного назначения, а также энергоустановкам из двух разнородных ИТ.
В последнем варианте, кроме решения общих задач, связанных с движением ЭМ, необходимо оценить эффективность использования запаса электроэнергии основного ИТ типа «металл-воздух» при совместной работе с тяговой буферной АБ. Энергоустановкам такого типа свойственны следующие качественные особенности, требующие, в свою очередь, количественной оценки:
- при каждом цикле движения в городе разряд буферной аккумуляторной батареи нарастает по мере набора скорости на этапе разгона ЭМ. В дальнейшем, при рекуперативном торможении, во время работы ЭМ на месте (перед светофором и т.д.), а также, что желательно, на этапе постоянной скорости движения, разряд буферной АБ должен быть компенсирован зарядом от основного ИТ;
- при соблюдении условий заряда АБ до требуемого уровня в каждом цикле глубина разряда (и заряда) буферной АБ составит лишь менее процента от её номинальной ёмкости. Такой сбалансированный буферный режим работы благоприятен для срока службы А Б в эксплуатации (при дополнительных мерах, предотвращающих ее перезаряд).
Важнейший показатель эффективности ЭМ − число циклов, то есть запас хода при этих условиях определяется лишь полным расходом запаса электроэнергии основного ИТ с высокой удельном энергоемкостью.
Однако если на протяжении одного цикла движения разряд буферной АБ не окажется компенсированным, то от цикла к циклу глубина её разряда будет нарастать. В результате буферная АБ может быть полностью (или недопустимо глубоко) разряжена задолго до того, как будет израсходована энергия основного источника тока.
В таком режиме совместной работы двух ИТ число циклов движения, то есть запас хода ЭМ, может быть существенно ограничен со стороны буферной АБ. Поскольку возможности и конечный результат работы тяговых ИТ на ЭМ зависят от многих условий и параметров, описываемых вышеприведённой системой уравнений, обоснование выбора и количественная оценка эффективности возможны лишь на основе расчетных исследований по разработанным программам.
В качестве примера можно привести результаты условного моделирования движения легкового ЭМ с двумя ИТ по городскому циклу НАМИ-2. Исходные данные, особенности процессов изменения скоростей, токов и напряжений во времени, а также полученные результаты можно выявить по распечаткам таблиц и графиков для вариантов 1.1 и 1.2.
| Электромобиль: | |
| тип электромобиля | легковой |
| полная масса, кг | |
| подъём, % | |
| расчётный радиус колёс, м | 0,236 |
| коэффициент сопротивления качению | 0,012 |
| сопротивление воздуха FB = KI AI v2, | Н |
| где коэффициент KI, Н∙с2/м4 | 0,3 |
| лобовая поверхность AI, м2 | 2,43 |
| передаточное число редуктора | 2,12 |
| передаточное число главной передачи | 4,3 |
| к.п.д. силовой передачи | 0,94 |
| Электродвигатель: | |
| тип электродвигателя | независимая ОВ |
| номинальное напряжение, В | |
| момент инерции, кг.м2 | 0,12 |
| сопротивление якоря, Ом | 0,075 |
| ограничитель тока якоря, А | |
| Источник металл-воздух: | |
| тип | МЕВ |
| количество модулей МЕВ (в параллель) | |
| ёмкость МЕВ (номинальная общая), А∙ч | |
| Параметры одного модуля МЕВ: | |
| масса модуля, кг | |
| число аккумуляторов в модуле | |
| ёмкость МЕВ (четырёхчасовая), А.ч | |
| Тяговая аккумуляторная батарея: | |
| тип батареи | никель-кадмий |
| масса батареи, кг | |
| ёмкость АБ (пятичасовая), А.ч | |
| номинальное напряжение, В | |
| начальная заряженность АБ, % | |
| сопротивление электрической цепи, Ом | 0,005 |
| Испытательный цикл (разгон с постоянным ускорением при импульсном регуляторе в цепи якоря с рекуперацией при торможении) | НАМИ-2 |
| длительность цикла, с | |
| Результаты моделирования режима движения: | |
| запас хода (ограничивает АБ), км | |
| АБ к 196-у циклу разрядится полностью | |
| время в рейсе, ч | 4,5 |
| Энергетические показатели: | |
| затраты энергии ИТ, кВт.ч | 21,5 |
| потери в источниках тока, кВт.ч | 6,9 |
| энергия на выходе АБ, кВт.ч | 8,7 |
| энергия движения ЭМ, кВт.ч | 6,0 |
| к.п.д. системы, % . | 41,0 |
| ёмкость, отдаваемая МЕВ, А.ч. | |
| удельный расход энергии (за цикл), Вт∙ч/т∙км | 129,7 |
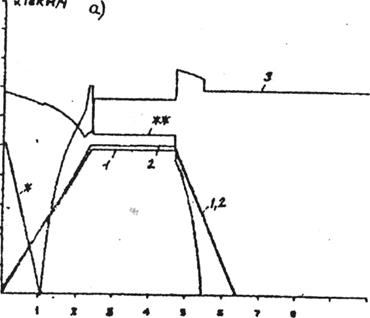
Рис. 8.3. Скорость движения и напряжение источника тока за цикл:
1 − скорость, км/ч; 2 − скорость по циклу, км/ч;
3 − напряжение на источнике тока, В;
* − напряжение регулятора тока якоря (со знаком -), В;
**− напряжение регулятора тока возбуждения (со знаком -), В.
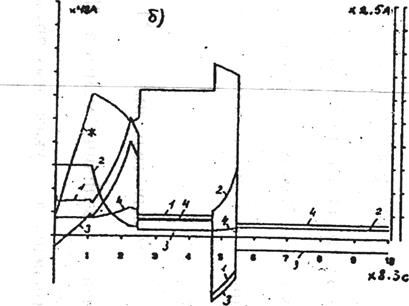
Рис.8.4. Изменение токов и напряжений на электродвигателе за цикл:
1 − ток якоря, А; 2 − ток обмотки возбуждения, А;
3 − ток буферной батареи, А; 4 −ток основного источника
металл-воздух, А; *− напряжение на электродвигателе,В
| Электромобиль: | |
| тип электромобиля | легковой |
| полная масса, кг | |
| подъём, % | |
| расчётный радиус колёс, м | 0,236 |
| коэффициент сопротивления качению | 0,012 |
| сопротивление воздуха Fв = КI АI v2, | H |
| где коэффициент KI, H∙c2/м4 | 0,3 |
| лобовая поверхность АI, м2 | 2,43 |
| перепередаточное число редуктора | 2,12 |
| перепередаточное число главной передачи | 4,3 |
| к.п.дк.п.д. силовой передачи | 0,94 |
| Электродвигатель: | |
| тип электродвигателя | независимая ОВ |
| номинальное напряжение, В | |
| момент инерции, кг∙м2 | 0,12 |
| сопротивление якоря, Ом | 0,075 |
| ограничитель тока якоря, А | |
| Источник металл-воздух: | |
| тип | МЕВ |
| количество модулей МЕВ (в параллель) | |
| ёмкость МЕВ (номинальная общая), А∙ч | |
| Параметры одного модуля МЕВ: | |
| масса модуля, кг | |
| число аккумуляторов в модуле | |
| ёмкость МЕВ (четырехчасовая), А∙ч | |
| Тяговая аккумуляторная батарея: | |
| тип батареи | никель-кадмий |
| масса батареи, кг | |
| емкостьАБ (пятичасовая), А∙ч | |
| номинальное напряжение, В | |
| начальная заряженность АБ, % | |
| сопротивление электрической цепи, Ом | 0,005 |
| Испытательный цикл(разгон с постоянным ускорением при импульсном регуляторе в цепи якоря с рекуперацией при торможении) | НАМИ-2 |
| длительность цикла, с | |
| Результаты моделирования режима движения: | |
| АБ не лимитирует запас хода | |
| запас хода (ограничивает МЕВ), км | |
| число циклов при разряде МЕВ | |
| время в рейсе, ч | 9,6 |
| Энергетические показатели: | |
| затраты энергии ИТ, кВт∙ч | 40,8 |
| потери в источниках тока, кВ∙ч | 10,8 |
| энергия на выходе МЕВ, кВт∙ч | 30,0 |
| энергия движения ЭМ, кВ∙ч | 14,0 |
| к.п.д. системы (по отдаче МЕВ), % | 46,7 |
| ёмкость, отдаваемая МЕВ, А∙ч | |
| удельный расход энергии по МЕВ | |
| (за цикл), Вт∙ч/т∙км | 132,8 |
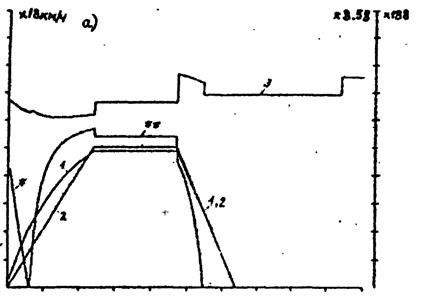
Рис. 8.5. Скорость движения и напряжение источника тока за цикл:
1 − скорость, км/ч; 2 − скорость по циклу, км/ч;
3 − напряжение на источнике тока, В;
* - напряжение регулятора тока якоря (со знаком -), В;
** - напряжение регулятора тока возбуждения (со знаком -), В
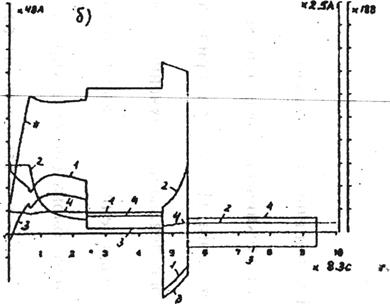
Рис. 8.6. Изменение токов и напряжений на электродвигателе за цикл:
1 − ток якоря, А; 2 − ток обмотки возбуждения, А;
3 − ток буферной батареи, А; 4 − ток основного источника металл-воздух, А;
* − напряжение на электродвигателе, В
Из исходных данных следует, что варианты различаются лишь режимом разгона ЭМ (при постоянном ускорении для варианта 1.1 и при нелинейном ускорении для варианта 1.2), а также повышенным на 3% напряжением разомкнутой цепи (НРЦ) для варианта 1.2.
Тем не менее, отмеченные различия существенно влияют на эффективность работы ЭМ. Если запас хода для варианта 1.1 ограничивает разряд буферной АБ (при 196 АБ разрядится полностью), то для варианта 1.2, когда заряженность АБ в каждом цикле обеспечивается, число циклов составит 418, а запас хода ЭМ − 95 и 218 км, соответственно.
Дата добавления: 2014-12-24; просмотров: 1493;