Тяговые расчёты электромобилей на ЭВМ. Применение ЭВМ открывает новые и весьма широкие возможности поиска, оценки и выбора оптимальных технических решений применительно к электромобилю с учётом его
Применение ЭВМ открывает новые и весьма широкие возможности поиска, оценки и выбора оптимальных технических решений применительно к электромобилю с учётом его назначения и условий эксплуатации.
Необходимую основу для достижения указанных целей составляют моделирование и расчётные исследования процессов движения электромобиля с вариацией основных и дополнительных параметров, а также режимов, упомянутых в разделе «Тяговые расчеты электромобилей».
Объектом моделирования является автономное транспортное средство − электромобиль с приводом ведущих колёс от тягового электродвигателя (электродвигателей с питанием от однотипной или комбинированной энергоустановки). При общем подходе к построению и реализации динамической модели движения подобного объекта возникает необходимость разработки программ для решения систем дифференциальных уравнений, связывающих кинематические, динамические и электромеханические соотношения и параметры электромобиля и его составных элементов, включая электроустановку, с заданным режимомдвижения. При этом моделирование процесса управления (действий водителя) может быть одним из элементов основной системы уравнений движения при условии ввода параметров (управляющих напряжений) с обратной связью по отклонению скорости движения электромобиля от заданного значения во времени (как элемент системы автоматического управления).
Построение и функциональное назначение программы моделирования процессов движения и затрат энергии показаны на рис. 8.11.
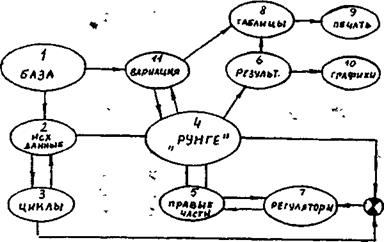
Рис. 8.11. Схема моделирования процесса движения и затрат
энергии электромобиля
Как видно из рисунка 8.11, предусмотрен ряд подпрограмм, предназначенных для работы в режимах диалога с пользователем ЭВМ для выполнения следующих задач:
1) «база» − объявление и общее управление подпрограммы и массивами переменных. Ввод наименований и основных параметров объектов моделирования (электромобилей, электродвигателей, источников тока, силовой передачи и др.);
2) «исходные данные» − ввод параметров составных частей энергоустановки (аккумуляторных батарей, электрохимических генераторов, емкостных накопителей), требуемых режимов движения (по городу, при постоянной скорости, при разгоне с места и т.д.), шага при расчетах, а также начальных условий движения;
3) «циклы» − выбор городского цикла и его особенностей, в том числе режима совместной работы источников тока и электродвигателя по участкам цикла, а также длительности движения по одному или нескольким циклам для расчётов запаса хода;
4) «рунге» − подпрограмма решения основной системы дифференциальных уравнений (например, методом Рунге-Кутта четвёртого порядка) с накоплением массивов требуемых данных, обсчётом интегрируемых величии и выводом текущих изменений параметров и переменных на дисплей;
5) «правые части» − правые части дифференциальных уравнений и изменяемые характеристики электродвигателей и источников тока с использованием теории цепей;
6) «результаты» − обработка результатов расчёта, вызов графиков и основных энергетических показателей на дисплей;
7) подпрограмма расчёта изменения режимов движения и работы регуляторов;
8) «таблица» − вызов исходных данных и результатов моделирования в виде таблицы на дисплей;
9) «печать» − распечатка таблиц исходных данных и результатов моделирования;
10) «графики» − вывод на дисплей и подготовка к распечатке графических зависимостей (скорости движения, токов, напряжений и других данных, полученных в ходе расчётов);
11) «вариация» − подпрограммы вариации требуемых параметров источников тока, силовой передачи, условий движения и прочее.
Как следует из приведённых кратких описаний, программа моделирования в общем случае может обеспечить моделирование процессов движения электромобилей различной грузоподъемности и назначения в любых заданных условиях эксплуатации.
Расчеты сопровождаются выдачей необходимой информации на дисплей, с последующими расчётами энергозатрат, запаса хода и особенностей работы электродвигателей и элементов энергоустановки.
Сопоставление различных вариантов и оптимизация параметров, характеризующих конкретные технические решения благодаря специальной подпрограмме «Вариация» по существу открывают возможности многомерных исследований, без чего, в частности, невозможна оценка эффективности энергоустановок из двух (и более) источников тока с вариацией сопротивления движению и других параметров системы.
Практически моделирование целесообразно при сопровождении всех этапов разработки, испытаний и модернизации производства электромобилей и их основных элементов.
Ниже приведены примеры расчёта и графическое представление их результатов (рис. 8.12, 8.17).
МОДЕЛИРОВАНИЕ ПРОЦЕССА ДВИЖЕНИЯ ЭЛЕКТРОБУСА
Электробус:
полная масса, т 21
полная вместимость, чел. 103
при максимальной вместимости, чел. 148
подъём, % 0
расчётный радиус колеса, м 0,362
коэффициент сопротивления качению 0,013
коэффициент сопротивления воздуха, Нс2/m4 0,35
лобовая поверхность, м2 12
передаточное число редуктора 3
передаточное число главной передачи 4,55
к.п.д. силовой передачи 0,94
Электродвигатель:
тип электродвигателя ДЭБ-200
номинальное напряжение, В 600
номинальный ток, А 365
масса, кг 670
момент инерции, кг∙м2 3,5
ограничитель тока якоря, А 600
расчётная температура, С 105
сопротивление якоря, Ом 0,099
номинальный ток возбуждения, А 25
Аккумуляторная батарея (АБ):
тип батареи литий-ионная
номинальное напряжение, В 600
ёмкость (пятичасовая), А.ч 1084
удельная энергия, Вт∙ч/кг 130
сопротивление (при 20°С), Ом 0,129
масса, кг 5000
электрооборудование (бортовое), Вт 1800
сопротивление электрической цепи, Ом 0,1
испытательный цикл ЕЭК ООН
с рекуперацией при торможении
регулятор статический импульсный
длительность цикла, с 195
Результаты и энергетические показатели:
энергия на выходе АБ, кВт∙ч 593,4
потери (в АБ), кВт 19,9
энергия движения ЭБ, кВт∙ч 234
к.п.д. движения, % 39
ёмкость, отдаваемая АБ, А∙ч 932
глубина разряда АБ, % 80
среднеквадратичный ток электродвигателя, А 136,8
число пройденных циклов 278
запас хода электробуса, км 274,8
время в рейсе, ч 15,1
удельный расход энергии, Вт∙ч/т∙км 103
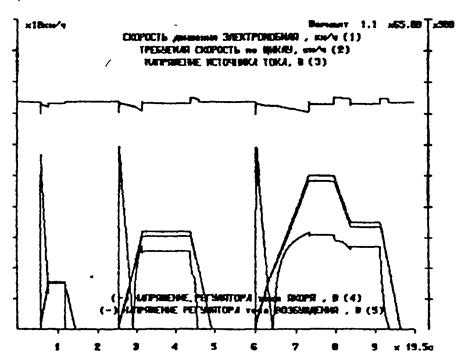
Рис. 8.12. Графики скоростей движения электробуса и
напряжения энергоисточника
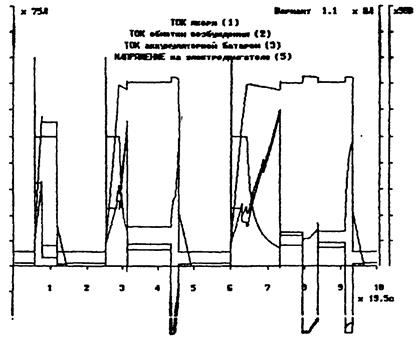
Рис. 8.13. Графики токов и напряжений
МОДЕЛИРОВАНИЕ ПРОЦЕССА ДВИЖЕНИЯ ЭЛЕКТРОМОБИЛЯ
Электромобиль (база): ВАЗ
полная масса, кг 1660
подъём, % 0
расчётный радиус колеса, м 0,27
коэффициент сопротивления качению 0,012
коэффициент сопротивления воздуха, Нс2/m4 0,3
лобовая площадь, м2 2,85
передаточное число редуктора 1,96
передаточное число главной передачи 3,94
общее передаточное число 7,72
к.п.д. силовой передачи 0,94
Электродвигатель с независимым возбуждением:
тип ПТ-125
номинальное напряжение, В 120
номинальный ток, А 120
момент инерции, кг∙м2 0,11
сопротивление якоря, Ом 0,065
ограничитель тока якоря, А 280
масса (с СУ и БВП), кг | 107
Аккумуляторная батарея (АБ):
тип батареи НКП-90А
номинальное напряжение, В. 120
Емкость номинальная (5 ч), А∙ч 116
сопротивление (при 20°С), Ом 0,110
масса, кг 310
Электрооборудование (бортовое), Вт 150
сопротивление электрической цепи, Ом 0,01
Испытательный цикл НАМИ-II
длительность цикла, с 83
с рекуперацией при торможении
разгон при постоянном ускорении
регулятор статический цмпульсный
Результаты расчётных исследований:
энергия на выходе АБ, кВт∙ч 10,3
потери в АБ, кВт∙ч 1,52
затраты на внешнее сопротивление
движению, кВт∙ч 3,5
ёмкость, отдаваемая АБ, А∙ч 81
(при глубине разряда до 80 %)
удельная энергоёмкость АБ, Вт∙ч/кг 33,3
число пройденных циклов 81
запас хода электромобиля, км 40,1
время в рейсе, ч 1,9
среднеквадратичный ток э/дв, А 89,8
удельный расход энергии, Вт∙ч/т∙км 155
Таблица 8. 4
Вариация массы аккумуляторной батареи (аналога)
ЭМ − ВАЗ; э/д − ПТ-125; АБ − НКП-90А; передаточное число − 7,72
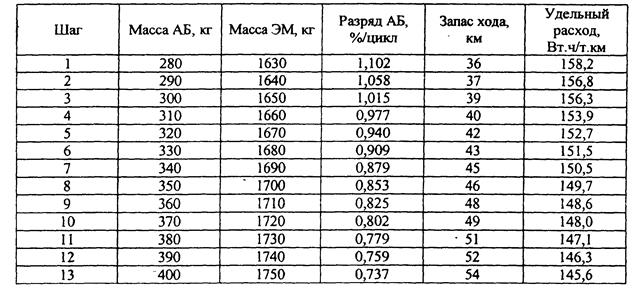
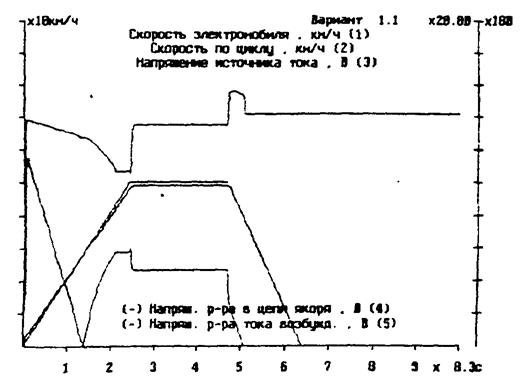
Рис. 8.14. Графики скорости ЭМ и напряжения источника тока
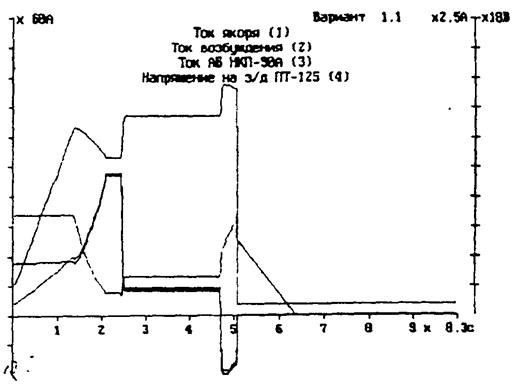
Рис. 8.15. Графики токов АБ и электродвигателя и напряжения на нём
МОДЕЛИРОВАНИЕ ПРОЦЕССА ДВИЖЕНИЯ ЭЛЕКТРОМОБИЛЯ
Электромобиль (база) ВАЗ
(установка «АльтЭн» для испытаний);
полная масса, кг 1700
подъем, % 0
расчётный радиус колеса, м 0,27
коэффициент сопротивления качению 0,012
коэффициент сопротивления воздуха, Нс2/m4 0,3
лобовая площадь, м2 2,85
передаточное число редуктора 1,96
передаточное число главной передачи 3,92
общее передаточное число 7,72
к.п.д. силовой передачи 0,94
Электродвигатель
с независимым возбуждением:
тип ПТ-125
номинальное напряжение, В 120
момент инерции, кг∙м2 0,11
сопротивление якоря, Ом 0,065
ограничитель тока якоря, А 280
номинальный ток возбуждения, А 5,6
масса (с СУ и ВВП), кг
ЭХГ алюминий-воздух:
тип ВА-240
параметры одного модуля ЭХГ:
масса, кг 110
количество элементов (последовательно) 92
ёмкость (четырёхчасовая), А.ч 240
параметры блока ЭХГ в ЭУ:
количество модулей (параллельно) 2
ёмкость (суммарная), А∙ч 509
масса блока ЭХГ в ЭУ, кг 220
Аккумуляторная батарея:
тип НКБН-25-УЗ
номинальное напряжение, В 91,2
количество Ак (последовательно) 76
число групп (ветвей) АБ в ЭУ 1
масса АБ, кг 91,2
ёмкость АБ (пятичасовая), А.ч 27
сопротивление (при 20°С), Ом 0,256
номинальное напряжение, В 91,2
бортовые потребители, Вт 150
сопротивление электрической цепи, Ом 0,01
испытательный цикл НАМИ-П
длительность цикла, с 83
с рекуперацией при торможении
с постоянным ускорением при разгоне
регулятор импульсный пропорциональный
Результаты моделирования движения ЭМ ВАЗ
запас хода обеспечивается от ЭХГ
(АБ не лимитирует запаса хода)
энергетические показатели:
энергия на выходе ЭХГ, кВт∙ч 55,4
потери в источниках тока, кВт∙ч 27,3
затраты на внешнее сопротивление движению, кВт∙ч 14.0
отдаваемая емкость ЭХГ, А∙ч - 485
запас (остаток ёмкости) ЭХГ, % 3
число пройденных циклов 323
запас хода электромобиля, км 158
время в рейсе, ч 7,4
среднеквадратичный ток электродвигателя, А 107,8
удельный расход энергии, Вт∙ч/т∙км 177
Таблица 8. 5
Вариации количества элементов в модуле ЭХГ ЭМ ВАЗ;
АБ − НКБН-25-УЗ 1 ветвь; ЭХГ − ВА-240х2
(масса АБ − 91 кг, 91 В, 76 Ак; передаточное число − 7,72)
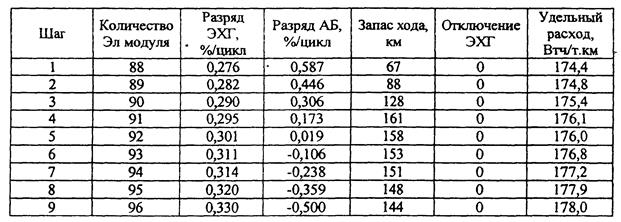
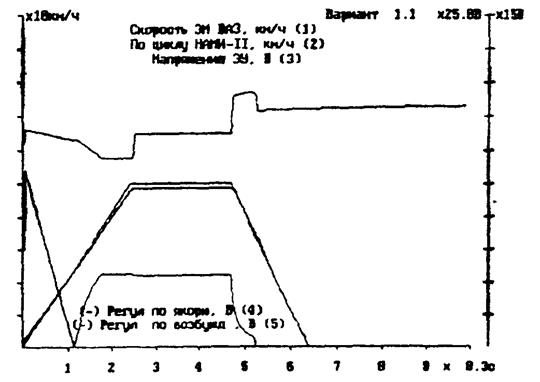
Рис. 8.16. Графики скоростей ЭМ и напряжения ЭУ
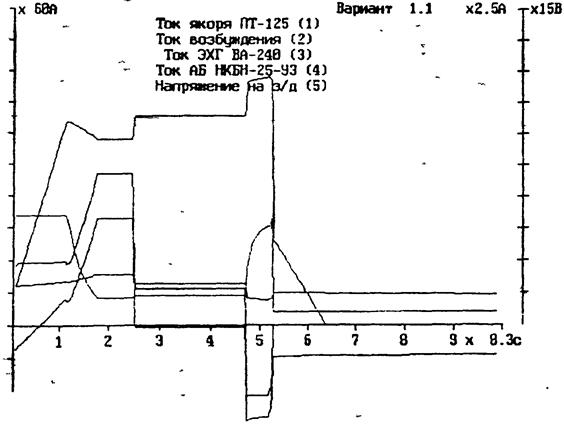
Рис. 8.17. Графики токов ЭД, ЭХГ, АБ и напряжения на ЭД
Практическое применение приведённых методов расчёта движения электромобилей и электробуса позволило получить прогноз показателей развития легковых и грузовых электромобилей, а также электробусов в Российской Федерации до 2010 г. при использовании требований DOE и USABC к тяговым источникам тока (NiMH, металл-воздух, литий-ионные батареи).
Результаты расчётных исследований приведены в таблице 8. 6 и 8.7.
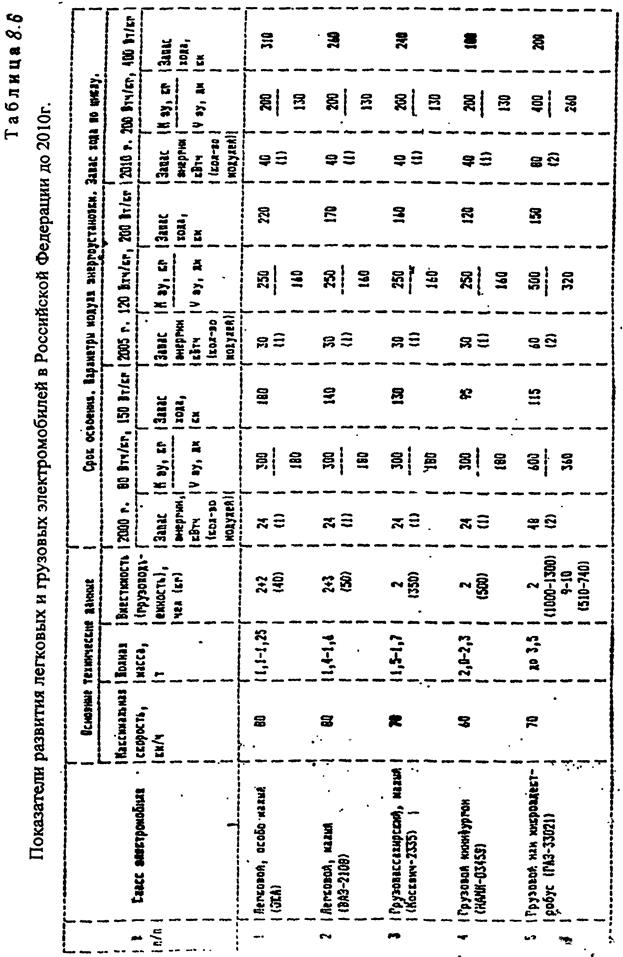
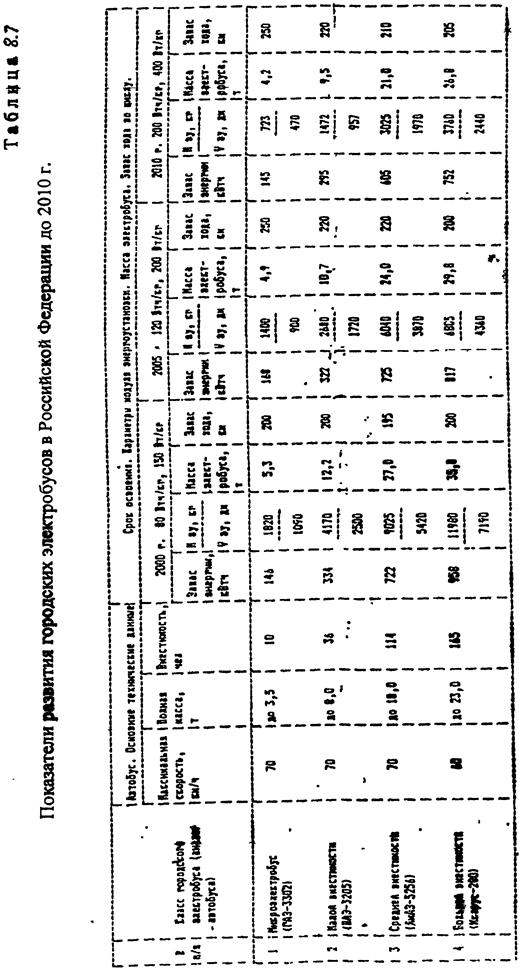
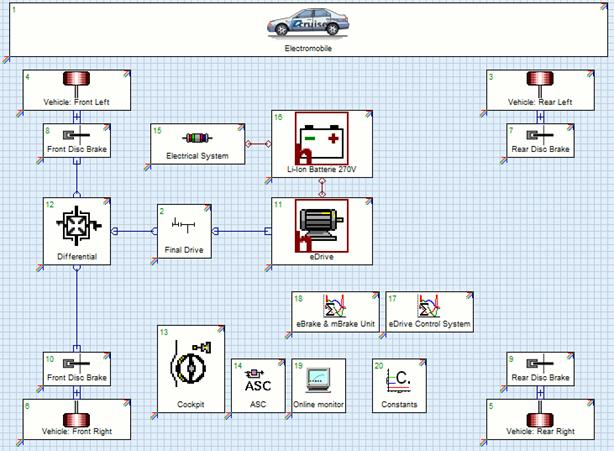
Рис. 8.18. Имитационная математическая модель электромобиля с одним тяговым электродвигателем
В современных условиях успеха при разработке сложного продукта в сжатые сроки, такого как ЭМ, можно достичь применением большого количества массива программного обеспечения. Одним из наиболее успешно используемых в нашей стране и за рубежом является, например, пакеты программного обеспечения австрийской фирмы «AVL».
«AVL CRUISE» это инструмент для разработки и оптимизации АТС (в том числе и ЭМ) с различными типами компоновки, силовыми установками любой конструкции и др.
Гибкая модульная концепция позволяет создать любую конфигурацию механических и электрических компонентов и систем управления.
На рисунке 8.18 представлена имитационная модель ЭМ с одним тяговым электродвигателем.
Реализация программных комплексов, например такого как «AVL CRUISE» во многом способствует ускорению расчетно-теоретических исследований на ранней стадии проектирования ЭМ.
Список литературы к разделу 8.3
1. Ставров О.Л. Перспективы создания эффективного электромобиля.
- М.: Наука, 1984.-88 с.
2. Сuгgen R.K. Automotive Electronics Handbook, Me Craw-Hill, Inc. New York, 1994.
З. Розенфильд В.Е., Исаев И.Р., Сизарёв Н.Н. Электрическая тяга. -М.: Трансжедцориздат, 1962. - 347 с.
4. Ефремов И.С., Яковлев А.И., Гущо-Малков Б.П. Электрический привод с автономным питанием на колёсном безрельсовом транспорте. Электричество. -1967. - № 7
5. Иоффе А.Б. Тяговые электрические машины. - М.-Л., Энергия, 1965.
6. Эйдинов А.А., Дижур М.М. Направления развития тяговых источников тока для электромобилей. - М., НИИНавтопром, 1985. - 46 с.
7. Эйдинов А.А., Дижур М.М. Расчётные исследования возможностей тяговых источников тока для электромобилей, Труды НАМИ, 1996.
8. Козловский А.Б., Яковлев А.И. Исполнительные циклы электромо-биля//Автомоб. пром-сть, - 1983. - № 2.
ГЛАВА 9. НОРМАТИВНЫЕ ДОКУМЕНТЫ (по электромобилям)
Материалы этой главы подготовлены с участием д.т.н. Кисуленко Б.В.
Особенности конструкции электрических транспортных средств обуславливают возникновение дополнительных рисков причинения вреда при их эксплуатации и последующей утилизации. Это не означает, что электрические транспортные средства являются более опасными, чем традиционные, но сдавливает разработку новых технических предписаний в целях минимизации южных нежелательных последствий.
В настоящее время важной частью технической политики в автомобильной промышленности всех технически развитых стран, в том числе, Российской Федерации, стран Европейского Союза и США является рост числа гармонизированных международных технических требований.
Такая политика основывается на участии этих стран в работе Всемирного форума для согласования правил в области транспортных средств (WP.29) КВТ ЕЭК ООН и в международных соглашениях в сфере безопасности автотранспортных средств, администрируемых WP.29: Женевском Соглашении 1958 г.[2] (США не является договаривающейся стороной) и Глобальном Соглашении 1998 г.[3]
Приоритетом договаривающихся сторон указанных международных Соглашений является международное сотрудничество в разработке передовых технических требований, в том числе, в отношении новых технологий, связанных с активным распространением электрических транспортных средств. Это сотрудничество охватывает Европейский Союз, Российскую Федерацию, США, Японию, Индию и Китай. Техническая политика договаривающихся сторон направлена на достижение большего уровня гармонизации между Правилами ЕЭК ООН и Глобальными техническими правилами (ГТП), принимаемыми в рамках вышеназванных международных соглашений, и требованиями к транспортным средствам, предъявляемыми на национальном уровне.
Результатом реализации политики практически всех технически развитых стран по сосредоточению деятельности по подготовке и развитию технических предписаний к показателям безопасности и экологическим характеристикам транспортных средств в рамках Всемирного форума WP.29 стало объединение ресурсов и научно-технического потенциала ведущих стран и беспрецедентное расширение тем разрабатываемых технических правил, касающихся развития передовых инновационных и экономически эффективных технологий.
Требования к электрическим транспортным средствам активно разрабатываются в течение последних нескольких лет. Эта работа продолжается и в настоящее время.
В частности, были приняты поправки к Правилам ЕЭК ООН № 10[4] в отношении электромагнитной совместимости, № 12[5], 94[6] и 95[7] в отношении травмобезопасного рулевого управления, фронтального и бокового столкновения, и ряд других, учитывающих особенности конструкции электрических транспортных средств. Продолжается работа над поправками к Правилам ЕЭК ООН № 100[8] в отношении электромобилей на батареях, с тем, чтобы гарантировать, что пользователи транспортного средства защищены от воздействия высокого напряжения. Эти поправки будут включать обязательные требования к батареям во время их перезарядки, при нормальных условиях эксплуатации и в случае дорожно-транспортного происшествия, а также методов испытаний на воздействие нагревания, влажности, залива жидкостью, пожарной безопасности, короткого замыкания, избыточной зарядки.
Кроме того, разрабатывается проект Глобальных технических правил в отношении транспортных средств, работающих на водороде и топливных элементах. Две рабочие подгруппы ведут соответственно разработку требований безопасности и требований к экологическим характеристикам и потреблению энергии. Подготовка первой редакции проекта ГТП с требованиями, касающимися безопасности, завершена. В то же время, было принято решение отказаться от разработки отдельных ГТП в отношении вопросов, связанных с охраной окружающей среды, и вносить поправки в существующие Правила ЕЭК ООН и ГТП, учитывающие конкретные категории транспортных средств.
Представители Японии, ЕС и США выступили с совместной инициативой о разработке ГТП в отношении электромобилей и образовании, по аналогии с требованиями в отношении транспортных средств, работающих на водороде и топливных элементах, двух рабочих групп для разработки соответственно требований к безопасности и к защите окружающей среды, касающихся электромобилей. Завершение разработки проекта ГТП ожидается в 2014 г.
Также было внесено предложение о разработке ГТП, касающихся малошумных транспортных средств, к которым относятся, прежде всего, электрические транспортные средства. Предложение охватывает вопросы, касающиеся предупреждения участников дорожного движения с нарушениями зрения о присутствии, расположении, направлении движения и работе малошумных транспортных средств.
Разработка гармонизированных технических предписаний в рамках Всемирного форума WP.29 является примером современного подхода к установлению международных единообразных требований в отношении новых конструкций и технологий. Обязательность применения таких требований в национальном законодательстве договаривающихся сторон вышеназванных международных соглашений, в том числе, Российской Федерации, позволяет ориентироваться, в первую очередь, на эти международные требования при разработке конструкции и подготовке производства электрических транспортных средств.
Постоянное участие представителей Российской Федерации в деятельности Всемирного форума WP.29, а также в работе его вспомогательных органов: рабочих и неофициальных групп, непосредственно разрабатывающих гармонизированные технические предписания, позволяет учитывать национальные интересы страны и позицию отечественной автомобильной промышленности при подготовке Правил ЕЭК ООН и ГТП, введенных в национальное законодательство техническим регламентом о безопасности колесных транспортных средств, утвержденным постановлением Правительства Российской Федерации от 10 сентября 2009 г. № 720.
В связи с образованием Таможенного союза Республики Беларусь, Республики Казахстан и Российской Федерацией на основе вышеуказанного российского технического регламента был разработан технический регламент Таможенного союза о безопасности колесных транспортных средств, утвержденный решением Комиссии Таможенного союза от 9 декабря 2011г. № 875, который так же предусматривает прямые ссылки на разрабатываемые Всемирным форумом WP.29 Правила ЕЭК ООН и Глобальные технические правила.
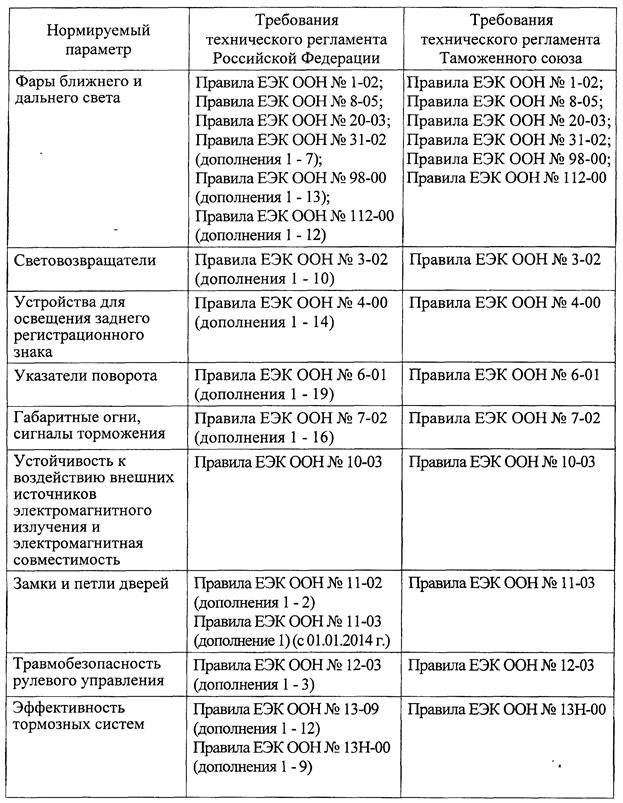
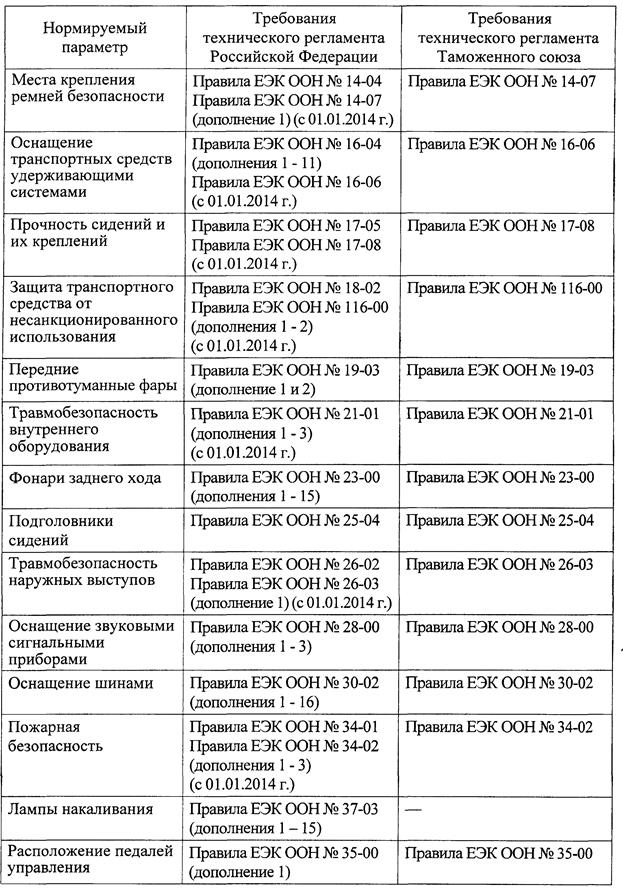
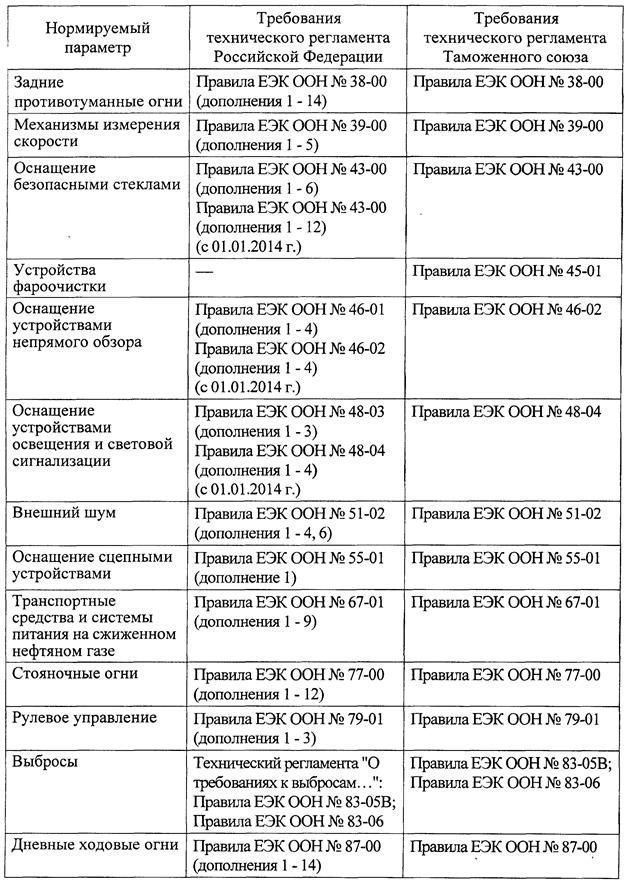
Вступающие в силу с 1 января 2015 г. в отношении новых типов транспортных средств категории М1 требования технического регламента Таможенного союза в сравнении с требованиями, установленными российским техническим регламентом, действующим до вступления в силу технического регламента Таможенного союза, приведены в таблице 9.1.
Таблица 9.1
Требования технических регламентов в отношении
транспортных средств категории М1
Продолжение таблицы 9.1
Продолжение таблицы 9.1
Продолжение таблицы 9.1
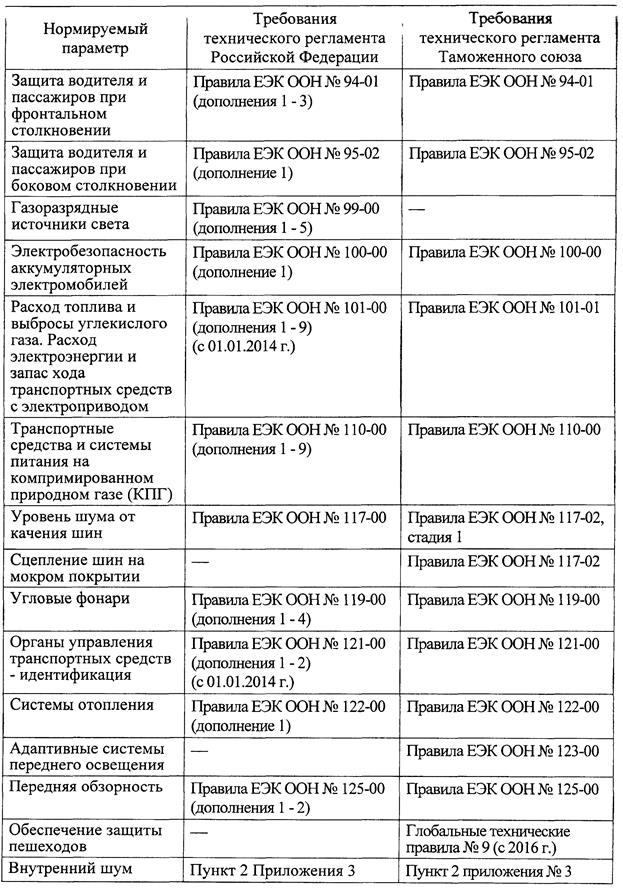
Продолжение таблицы 9.1

В отношении электромобилей действующим и планируемым к введению в действие с 1 января 2015 г. техническими регламентами предусмотрены специальные требования, содержащиеся в частности:
- в Правилах ЕЭК ООН № 1 3 − в отношении рекуперативного торможения;
- в Правилах ЕЭК ООН №№ 83 и 101 − в части применения специальной методики испытаний, подробно описанной в пп. 2.1.3.6.3.2, 2.1.3.6.3.3. и 2.1.3.6.3.4. настоящего отчета;
- в Правилах ЕЭК ООН № 100 − в отношении электробезопасности.
Таблица 9.2
Структура объектов к ТТ по безопасности ЭМ
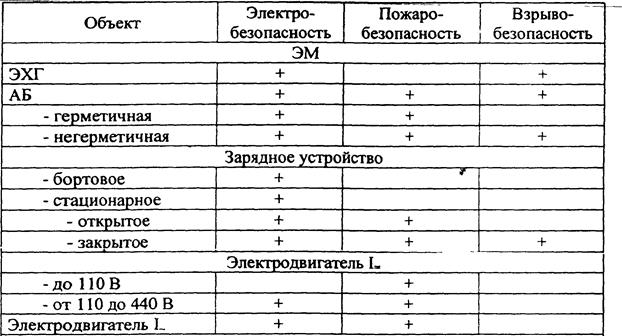
Из международных документов известны Правила № 100 ЕЭК ООН «Единообразные предписания, касающиеся официального утверждения аккумуляторных электромобилей в отношении конкретных требований к конструкции и функциональной безопасности».
Документ содержит:
область применения;
- определение;
- технические требования и испытания;
- модификация типа транспортного средства и распространение официального утверждения типа;
- соответствие производства и другое.
Приложение 3 «Защита от прямого контакта с частями под напряжением» (выдержки из стандарта МЭК 529-1989г).
Последнее дополнение 99 к Правилам № 100 ЕЭК ООН вступило в силу 21.02.02 и относится к «Определению уровня выбросов водорода в процессе заряда тяговой батареи» (приложение 7).
Перечень зарубежных и отечественных нормативных документов приведен в таблице 9.3 и 9.4.
Таблица 9.3
Отечественные нормативные документы по сертификации электромобилей
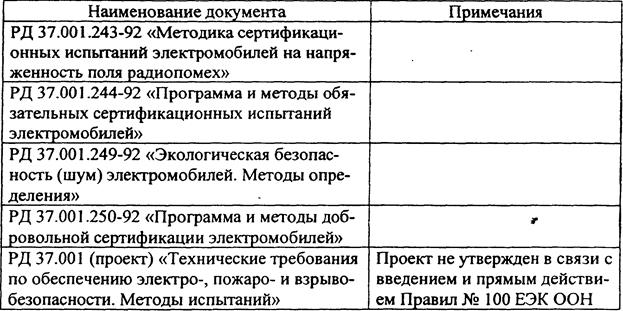
Таблица 9.4
Перечень стандартов SAE по электромобилям
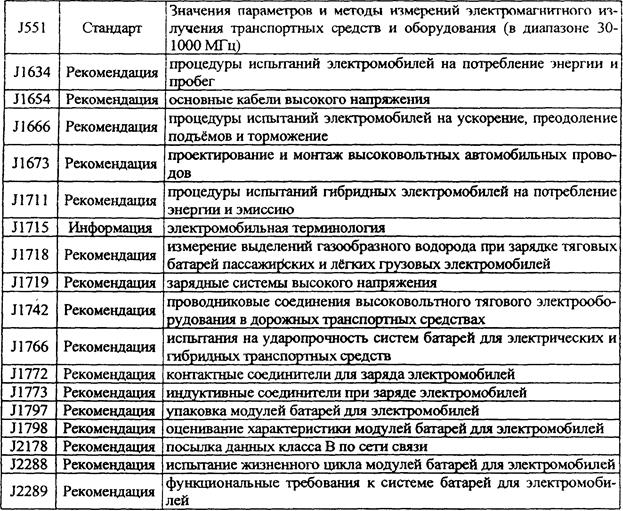
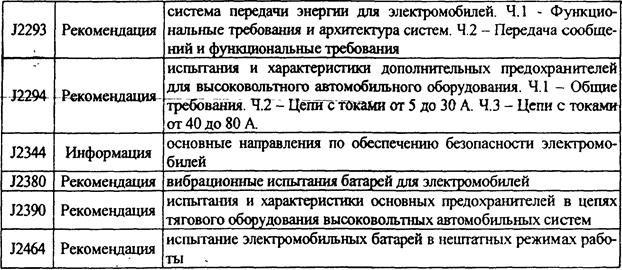
Для сведения ниже приведён перечень документов SAE по электромобильной тематике.
Опубликованные документы
SAE J715 − Терминология но электромобильной технике
SAE J1718 − Измерения эмиссии водорода при зарядке аккумуляторных батарей в пассажирских электромобилях и в лёгких грузовиках
SAE J1766 − Испытания на удароустойчивость аккумуляторных батарей для электромобилей и гибридных электромобилей
SAE J1772 − Контактные разъёмы для зарядки батарей электромобилей
SAE J1773 − Индуктивные разъёмы для зарядки электромобилей
SAE J1797 − Упаковка модулей батарей для электромобилей
SAE J1798 − Характеристики модулей батарей для электромобилей
SAE J2288 − Испытания срока службы модулей батарей для электромобилей
SAE J2293 − Системы передачи энергии для электромобилей
SAE J2344 − Рекомендации по безопасности электромобилей Разрабатываемые документы
SAE J2380 − Вибрационные испытания батарей для электромобилей
SAE J2289 − Функциональные требования к сборкам аккумуляторных батарей Документы по электромобильной технике, разработанные Комитетами SAE
SAE J1634 − Процедуры испытаний энергопотребления и определения пробега электромобилей
SAE J1654 − Высоковольтные силовые кабели
SAE J1666 − Процедуры испытаний электромобилей на ускорение, замедление и преодоление подъёмов
SAE J1673 − Конструирование высоковольтных жгутов для транспортной техники
SAE J1711 − Процедуры испытаний энергопотребления гибридных электромобилей
SAE J1742 − Разъемы и соединения высоковольтного проводного оборудования на борту дорожной транспортной техники
SAE J2294 − Испытания и характеристики предохранителей для высоковольтного проводного оборудования на борту дорожной транспортной техники (вспомогательное оборудование)
SAE J2390 − Испытания и характеристики дополнительных предохранителей для высоковольтного проводного оборудования на борту дорожной транспортной техники (тяговое оборудование)
Система стандартов SAE J1939
Система стандартов SAE J1939 включает следующие документы:
J1939 Практические рекомендации по бортовым сетям последовательного управления и связи на транспортных средствах.
J1939/11 Физический уровень − 250 кБ/с, витая пара проводников в оболочке.
J1 939/13 Разъём для стационарной диагностики.
J1 939/21 Уровень обмена данными.
J1939/31 Уровень сети.
J1939/71 Уровень применения на транспортных средствах.
J1939/73 Управление сетью.
J1113-13 Процедура измерения электромагнитной совместимости для компонент транспортного средства − Раздел 13 − Защита от электростатических зарядов.
J1128 Низковольтный первичный кабель.
J1213 Словарь терминов по автомобильной электронике.
J1349 Код теста мощности двигателя − искровое зажигание и зажигание сжатием − оценка мощности в сети.
J1455 Совместные SAE/TMC − практические рекомендации по проектированию электронных устройств (тяжёлые грузовики).
J1587 Совместные SAE/TMC применения электронного обмена данными между микропроцессорными системами в тяжёлых грузовиках.
J1708 Последовательный обмен данными между микропроцессорными системами в тяжёлых грузовиках.
J1843 Датчик положения педали акселератора для использования в системах управления в средних и тяжёлых грузовиках.
J1922 Электронное управление тягосиловой установкой, используемое в средних и тяжёлых грузовых дизельных дорожных транспортных средствах.
J1930 Термины электронных и электрических систем.
J1944 Системы мойки и стеклоочистители многоцелевых грузовиков и автобусов.
J1979 Режимы диагностирования электронного оборудования.
J2030 Стандарт характеристик электрических разъёмов тяжёлых грузовиков.
J2403 Номенклатура систем диагностики электронных устройств средних и тяжёлых грузовиков.
В НП «РОСЭЛЕКТРОТРАНС» имеются следующие стандарты SAE, подлежащие гармонизации в России:
1. J551. Величины интенсивности и методы измерения электромагнитного излучения от автомобилей и устройств (диапазон 30-100 МГц).
2. J551-5. Величины интенсивности и методы измерения напряжённости магнитного и электрического полей от электромобилей (диапазон от 9 кГц до 30 МГц).
3. J113-13. Процедура измерения электромагнитной совместимости для компонентов транспортных средств − Часть 13 − невосприимчивость к электростатическому заряду.
4. J1211. Практические рекомендации по проектированию электронного оборудования.
5. J1711. Практические рекомендации по измерению эмиссии и экономии топлива гибридными электромобилями.
6. J1715. Терминология электромобилей.
7. J1742. Высоковольтные кабельные бортовые соединения в дорожной транспортной технике − методы испытаний и общие требования к параметрам.
8. J1797. Практические рекомендации по упаковке модулей аккумуляторных батарей электромобилей.
9. J1798. Практические рекомендации по сравнению характеристик модулей аккумуляторных батарей электромобилей.
10. J2178-1. Посылки данных в коммуникационных сетях класса В - детализированные форматы данных и физическая адресация.
11. J2178-2. Посылки данных в коммуникационных сетях класса В - Часть 2 − определение параметров данных.
12. J2178-3. Посылки данных в коммуникационных сетях класса В - Часть 3 − рамки идентификаторов при однобитном представлении заголовков.
13. J2178-4. Посылки данных в коммуникационных сетях класса В - определение посылок при трёхбитном представлении заголовков.
14. J2288. Измерения жизненного цикла модулей аккумуляторных батарей электромобилей.
15. J2344. Руководство по безопасности электромобилей.
На рисунках 9.1 и 9.2 дана международная организационная структура проводимых работ по гармонизации глобальных правил (по экологическим АТС).
Учитывая, что в мировой практике разработка отдельными странами ряда международных стандартов но электромобилям находится в начальной стадии, а также вводятся новые дополнения в существующие, выпуск разработанных НАМИ стандартов предприятия (СТП) позволит обосновать и скорректировать, позицию отечественных разработчиков и потребителей ЭМ и электробусов с учетом существующих и разрабатываемых международных стандартов.
В настоящее время уже действуют следующие правила ЕЭК ООН, стандарты ИСО (ISO) и МЭК (IEC), распространяющиеся на ЭМ:
• Правила ЕЭК ООН № 100 «Единообразные предписания, касающиеся официального утверждения аккумуляторных электромобилей в отношении конкретных требований к конструкции и функциональной безопасности»;
• Правила ЕЭК ООН № 101 «Единообразные предписания, касающиеся официального утверждения легковых автомобилей, оборудованных двигателем внутреннего сгорания, в отношении измерения объема выброса двуокиси углерода и расхода топлива, а также транспортных средств категорий Ml и М2, оборудованных электроприводом в отношении измерения расхода электроэнергии и запаса хода»;
• Правила ЕЭК ООН № 83 (5-я поправка) «Единообразные предписания, касающиеся официального утверждения транспортных средств в отношении загрязняющих веществ в зависимости от топлива, необходимого
для двигателей»;
• Стандарт ISO 6469-3:2001 «Транспорт дорожный электрический. Требования безопасности. Часть 3. Защита людей от поражения электротоком» (действует); Стандарт ISO 6469-3 :2001/Сог. 1:2003 «Транспорт дорожный электрический. Требования безопасности. Часть 3. Защита людей от поражения электротоком. Техническая поправка 1» (действует);
• Стандарт ISO 6469-1:2009 «Транспорт дорожный электрический. Требования безопасности. Часть 1. Аккумулирование электроэнергии на борту автомобиля» (действует): Стандарт ISO 6469-2:2009 «Транспорт дорожный электрический. Требования безопасности. Часть 2. Средства функциональной безопасности защиты от повреждений» (действует);
• Стандарт ISO 8715-2005 «Транспорт дорожный электрический. Словарь» (действует);
• Стандарт ISO 8714-2002 «Транспорт дорожный электрический. Контрольное потребление энергии и контрольное расстояние. Методы испытания легковых автомобилей и легких грузовых автомобилей» (действует);
• Стандарт IEC 61851-1 (2001) «Система кондуктивной (токопроводящей) зарядки электромобилей»;
• Стандарт IEC 61982-3 (2001) «Аккумуляторы для приведения в движение электрического дорожного транспорта. Часть 3. Испытания эксплуа-тационных характеристик и долговечности (городской транспорт)»;
• Стандарт IEC 62196-1 (2003) «Вилки, штепсельные розетки, соединители и вводы для транспортных средств. Кондуктивная зарядка электрических транспортных средств. Часть 1. Зарядка электромобилей до 250А включительно для переменного тока и 400А для постоянного тока»;
• Стандарт IEC/TR 62343-6-2 (2009) «Динамические модули»;
• Стандарт IEC 62576 (2009) «Электрические двухслойные конденсаторы для использования в гибридных электрических транспортных средствах. Методы испытаний электрических характеристик».
Однако, уже на данном этапе необходимо разработать целевые стандарты предприятия с тем, чтобы не дожидаясь международных разработок, иметь базовые документы, позволяющие оценивать как отечественные, так и международные стандарты с использованием многолетнего накопленного опыта работ института, включая руководящие документы (РД) Автополигона ФГУП «НАМИ».
Рассмотрим три стандарта предприятия, которые уже разработаны ГНЦ РФ ФГУП «НАМИ». В работе над этими нормативными документами были использованы материалы Технического регламента по безопасности колесных транспортных средств, Правила ЕЭК ООН, касающиеся ЭМ и АТС с КЭУ, а также правила ИСО и МЭК.
Дата добавления: 2014-12-24; просмотров: 2764;