Метод определения собственных частот крутильных колебаний мотор-колёс автомобилей
Для определения собственных частот крутильных колебаний мотор-колёс автомобилей используют математические методы анализа колебаний многомассовых систем. При этом расчёты ведут не по действительной, а по упрощенной эквивалентной схеме.
Рассмотрим эквивалентную схему мотор-колеса. В схеме мотор-колеса для определения крутильных колебаний можно выделить ряд сосредоточенных масс и одну сосредоточенную массу реактивного контура. На рисунке 1.25 представлена исходная схема крутильных колебаний мотор-колеса с учетом реактивных элементов. В неё включены однолинейное изображение корпусов электродвигателя и редуктора, а также кинематическая схема редуктора, состоящего из двух последовательно соединенных планетарных рядов. Входным звеном каждого ряда является солнечная шестерня, а выходным − водило. Введение в схему корпусов электродвигателя и редуктора позволяет логически перейти к эквивалентной схеме с реактивными контурами.
Податливость обода, ступицы и некоторых других деталей мотор-колеса не учитывают ввиду их малой величины. Шестерни редуктора в подобных системах принято считать абсолютно жёсткими. Фрикционные механизмы сцепления и механизмы переключения также не учитывают, за исключением тех случаев, когда рассматривается переходный процесс включения или переключения при обесточенном электродвигателе. Если электродвигатель соединен с редуктором без торсионного вала, то податливостью е12 можно пренебречь, а массы с моментами инерции θ1 и θ2 следует объединить. Рассматриваемый в данном случае механизм приведения дифференциальной передачи с тремя степенями свободы имеет передаточное число iк = 1 в
активном контуре и iк = -1 в реактивном контуре.
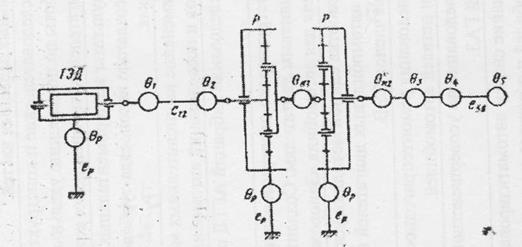
Рис. 1.25. Структурная схема крутильной системы мотор колеса:
θ1,θ2 − моменты инерции, соответственно, якоря (ротора) тягового электродвигателя и деталей механической передачи, непосредственно связанных с валом электродвигателя (торсионный вал, тормозной диск и др.): θв1, θв2 − моменты инерции водила первою ряда редуктора с cателлитами и солнечной шестерней второго ряда, а также, водила второго рада редуктора с сателлитами; θ3 − момент инерции вращающихся деталей подшипников колеса, ступицы и обода; θ4 − момент инерции шины; θ5 − эквивалентный момент инерции части массы автомобиля, движущегося поступательно; θР − момент инерции реактивной массы мотор-колеса, к которой относятся все элементы мотор-колеса, не имеющие углового перемещения относительно опоры внутренних обойм подшипников колеса; е12 − податливость части вала якоря (ротора) электродвигателя и торсионного вала; ев1, е56 − податливость, соответственно, водила первого ряда и шиша на крушение; ер − податливость реактивного контура, определяемая податливостью на кручение системы подвески.
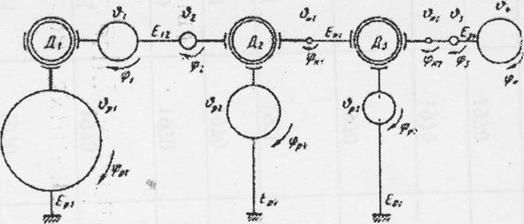
Полная эквивалентная схема мотор-колеса, выполненная в соответствии с работами, показана на рисунке 1.26.
|
Рис. 1.26. Эквивалентная схема мотор-колеса:
υ1, υ2 – момент инерции якоря (ротора) электродвигателя и приведенный момент инерции деталей механической передачи, непосредственно связанных с валом электродвигателя; υн1,υн2 – приведенный момент инерции, соответственно, водила первого и второго рядов; υ3,υ4 приведенный момент инерции колеса и приведенный эквивалентный момент инерции части массы автомобиля; υр – приведенный момент инерции реактивной массы мотор колеса; Е12 – податливость части вала якоря (ротора) электродвигателя и торсионного вала; Ен1 – податливость водила первого ряда на кручение; Е34 – приведенная податливость шины на кручение; Ер1, Ер2, Ер3 – приведенная податливость первой, второй и третьей ветвей реактивного контура; Д1, Д2, Д3 – дифференциальный механизм первой, второй и третьей ветвей реактивного контура.
Для первой ветви реактивного контура передаточное число iк = 1, для второй ветви ik = k1 и для третьей ik = (k1 + 1)k2. В связи с этим в эквивалентную схему входят три значения приведенной податливости реактивного контура − по числу ветвей, соответствующих трём моментам, приложенным к корпусу электродвигателя, коронным шестерням первого и второго рядов редуктора.
В процессе эксплуатации автомобиля вес Gк, приходящийся на одно мотор-колесо, может отклоняться от номинального значения в связи с недогрузкой автомобиля. В подобных случаяхследует определять соответствующий диапазон значений моментов инерции θ5 и υ4.
Податливость шины на кручение как параметр отличается нестабильностью для шин даже одного типоразмера. Поэтому в некоторых случаях в эквивалентной схеме следует учитывать вероятные крайние значения податливости Е34, т.е. оперировать двумя эквивалентными схемами. Принимают, что деформации в системе мотор-колеса подчиняются закону Гука, а податливости связей не зависят от угла закручивания.
Скорость изменения состояния системы при свободных колебаниях определяется двумя факторами: силой, восстанавливающей равновесное состояние, и внутренним сопротивлением, пропорциональным скорости φ. При этом указанная сила зависит от угла поворота φ, определяющего отклонение системы из равновесного состояния. Поскольку на свободные колебания влияет только изменение угла φ, то система с m степенями свободы в общем случае может совершать m независимых гармонических свободных колебаний. Каждому колебанию соответствует определенное значение собственной угловой частоты  (n − индекс свободного колебания). Со свободными колебаниями связаны резонансные состояния системы. Поэтому необходимо выявить границы возможных значений собственных частот свободных колебаний.
(n − индекс свободного колебания). Со свободными колебаниями связаны резонансные состояния системы. Поэтому необходимо выявить границы возможных значений собственных частот свободных колебаний.
Эквивалентная схема (см. рис. 1.26), положенная в основу определения собственных частот системы мотор-колеса, близко отображает действительное распределение масс и податливостей связей исходной системы. Для составления дифференциальных уравнений, описывающих свободные колебания эквивалентной схемы, воспользуемся уравнением Лагранжа второго рода в обобщенных координатах:

 +
+  = 0
= 0
Общие выражения для кинетической и потенциальной энергии эквивалентной схемы имеют вид:
К = 
П=  +
+ 
 +
+ 
Преобразуем полученные выражения с учетом двух условий: φн2.= φ3 и φр2 = φ2 - φн1. Первое условие непосредственно следует из эквивалентной схемы мотор-колеса, поскольку податливость связи между сосредоточенными массами υн2 и υ3 равна нулю. Второе условие вытекает из необходимости приведения числа обобщенных координат φ в соответствие с числом степеней свободы эквивалентной схемы. Поэтому освободимся от избыточной обобщенной координаты φр2, выразив её через φ2 и φн1:

П=  +
+ 
 +
+
 +
+
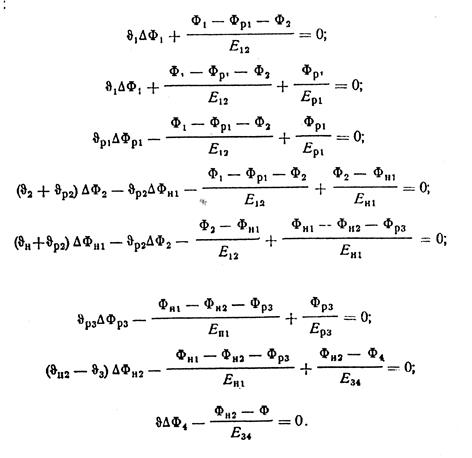
С yчетoм производных вышеприведённого уравнения Лагранжа и в соответствии с ним запишем систему дифференциальных уравнений второго порядка, описывающих свободные колебания рассматриваемой эквивалентной схемы.
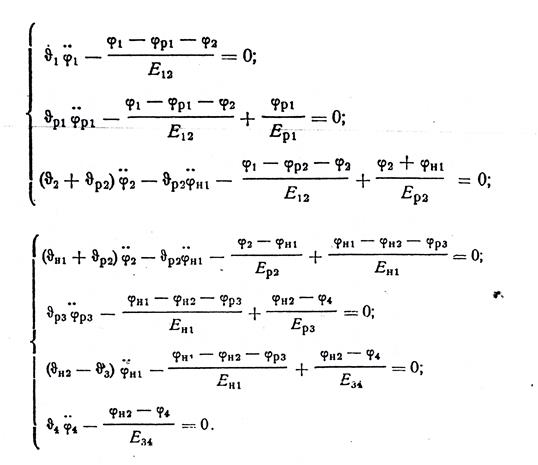
Принимая решение данной системы из семи уравнений в виде
φi= Фsin  , после определения вторых производных получим следующие амплитудные уравнения:
, после определения вторых производных получим следующие амплитудные уравнения:
Определитель, составленный из коэффициентов при величинах Ф1, Фр1, Ф2, Фн1, Фн2, Фр3, Ф4 в последних уравнениях, тождествен исходной матрице:
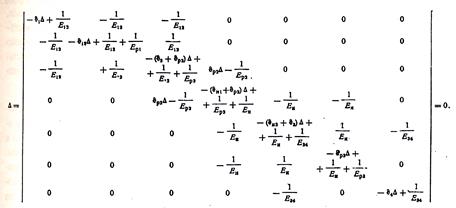
Определение частот свободных колебаний линейной крутильной системы в математическом отношении совпадает с решением задачи по нахождению собственных значений исходной матрицы. В отделе вычислительной техники НАМИ составлена стандартная программа для нахождения собственных значений матрицы на ЭВМ.
Таким образом, рассмотренной метод определения собственных частот крутильных колебаний мотор-колеса позволяет использовать эквивалентную схему крутильной системы мотор-колеса с учетом реактивных элементов, близко oтoбражающую действительное распределение масс и податливостей связей исходной системы.
Дифференциальные уравнения, описывающие свободные колебания эквивалентной системы и составленные на основе уравнений Лагранжа второго рода в обобщенных координатах, имеют решение, приводящее к амплитудным уравнениям. Система амплитудных уравнений позволяет составить определитель, который по виду тождествен исходной матрице.
Список литературы к разделу 1.4
1. Яковлев А.И. Конструкция и расчет электромотор-колес.- М.: Машиностроение, 1970.
2. Бабаков И.М. Теория колебаний.- М.: Наука, 1968.
З. Семенов В.М., Яковлев А.И. , Эйдинов А.А. Метод определения собственных частот крутильных колебаний мотор-колес автомоби-лей//Автомоб. пром-сть. - 1976, - № 6
Дата добавления: 2014-12-24; просмотров: 1758;