ПОНЯТИЕ ОБ ОПТИМАЛЬНЫХ ПО БЫСТРОДЕЙСТВИЮ ПРОЦЕССАХ
Для уменьшения времени протекания переходного процесса в инерционных объектах следует применять принцип форсирования процессов на отдельных интервалах времени посредством увеличения сигнала управления.
 |
Рассмотрим для примера процессы нарастания ЭДС на выходе генератора (Г) постоянного тока (рис. 5.1). Пусть к обмотке возбуждения генератора (ОВГ) прикладывается скачкообразное по форме напряжение возбуждения UB (рис. 5.1,а). Так как переходный процесс определяется уравнением
 , (5.1)
, (5.1)
то нарастание э.д.с. во времени еГ(t) происходит по закону экспоненты (рис. 5.1,б):
 , (5.1)
, (5.1)
где kГ – коэффициент усиления генератора; Т – постоянная времени.
Если величина напряжения возбуждения равна номинальному значению Uв.н, то установившееся значение ЭДС генератора будет равно номинальному: Ег.н = kг Uв.н (кривая 1 на рис.5.1,б). При величине напряжения возбуждения 2Uв.н получим соответственно 2Ег.н (кривая 2 на рис. 5.1,б).
Принцип форсирования процесса нарастания ЭДС генератора заключается в том, что на интервале времени 0£ t £t1 к обмотке возбуждения ОВГ подводится повышенное напряжение возбуждения Uв > Uв.н, а в момент t1, когда ег(t1) = Eг.н, напряжение возбуждения уменьшается до номинальной величины Uв.н (рис. 5.1,в). В результате этого процесс нарастания ЭДС генератора будет иметь форму кривой 3, совпадающей в интервале 0£t£t1 кривой 2 (рис. 5.1,б). Следовательно, при таком воздействии на обмотку ОВГ получена меньшая длительность переходного процесса генератора: t1 < 3Т.
Аналогично можно форсировать процессы уменьшения ЭДС на выходе генератора. Если, например, задано время tp, в течение которого ЭДС генератора должна измениться от заданного значения Eг.н до нуля, то требуемое максимальное напряжение возбуждения, прикладываемое к ОВГ на период 0£ t £ tр,
 , (5.3)
, (5.3)
где  .
.
Величина максимально возможного напряжения возбуждения генератора ограничивается обычно прочностью изоляции и возможностями источника электроэнергии, к которому подключена обмотка ОВГ.
Существуют также другие способы форсирования переходных процессов, например, посредством изменения коэффициента демпфирования [21], в результате чего требуется изменять параметры объекта на отдельных интервалах времени. Однако такой способ сложно реализовать и поэтому на практике для улучшения переходных процессов применяют нелинейные корректирующие устройства [17, 20].
При разработке оптимальных по быстродействию систем обычно используют принцип управления объектом при максимально допустимой величине сигнала управления  , закон изменения которого определяют методами теории оптимального управления (см. гл. 3).
, закон изменения которого определяют методами теории оптимального управления (см. гл. 3).
Форма кривой оптимальных переходных процессов системы определяется с учетом имеющихся ограничений координат. Примем, что зона нечувствительности в характеристиках объекта отсутствует. Если, например, по условиям работы объекта, представляющего собой идеальный интегратор первого порядка, ограничена скорость изменения управляемой переменной (первая производная)
 , (5.4)
, (5.4)
то процесс будет оптимальным по быстродействию, если первая производная в течение всего времени переходного процесса поддерживается на предельно допустимом значении:
 ,
,
откуда после интегрирования получим
 . (5.5)
. (5.5)
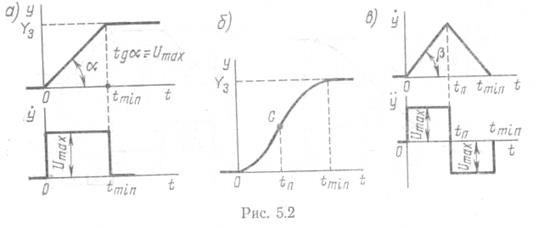
При нулевых начальных условиях значение С=0. В этом случае оптимальный по быстродействию переходный процесс определяется линейным законом у(t) = ±Umaxt. Процесс изменения выходной переменной объекта от нуля до заданного значения Yз за минимальное время tmin с учетом указанного ограничения показан на рис.5.2,а. Закон управления, определяющий изменение первой производной у(t), является в данном случае релейным и имеет один интервал включения сигнала управления.
Примером устройства, имеющего ограничение по скорости, может быть асинхронный электродвигатель, у которого установившаяся скорость не превышает синхронную; гидравлический серводвигатель, скорость которого не может превзойти его скорость при полностью открытом золотнике, и др.
Если же по условиям работы объекта, представляющего собой идеальный интегратор второго порядка, ограничено только ускорение изменения управляемой переменной (вторая производная)
 , (5.6)
, (5.6)
то процесс будет оптимальным по быстродействию при максимальной средней скорости изменения выходной переменной в течение всего времени переходного процесса. При этом в начале процесса следует наращивать скорость наиболее интенсивно, т. е. с максимально возможным ускорением и u = +Umax. Скорость будет нарастать по линейному закону, а выходная переменная – по параболе, поскольку после интегрирования (5.6) получим
 (5.7)
(5.7)
При нулевых начальных условиях значения С11 = 0; С21 = 0.
Если поддерживать такой режим до прихода объекта в заданное положение (у = Yз), то в момент его достижения скорость движения будет отличной от нуля. Так как интенсивность замедления ограничена
условием (5.6), то торможение не может быть мгновенным, и, следовательно, объект пройдет заданное положение. Учитывая это, после точки С (рис. 5.2,б) следует осуществить торможение с максимально возможным замедлением: и u = –Umах. При этом скорость будет убывать по линейному закону, а выходная переменная – нарастать до заданного значения по параболе, поскольку теперь после интегрирования (5.6) получим
 (5.8)
(5.8)
Графики изменения у(t), скорости  и ускорения
и ускорения  показаны на рис. 5.2,б,в. Так как разгон и торможение производятся с одинаковыми ускорением и замедлением, то время переключения сигнала tп равно половине оптимального (минимального) времени tmin. График для первой производной в данном случае имеет вид равнобедренного треугольника с углом наклона b(tgb = Umax). Построенный таким образом переходный процесс является оптимальным с учетом ограничения только ускорения. В данном случае получено релейное управление с двумя интервалами включения реле.
показаны на рис. 5.2,б,в. Так как разгон и торможение производятся с одинаковыми ускорением и замедлением, то время переключения сигнала tп равно половине оптимального (минимального) времени tmin. График для первой производной в данном случае имеет вид равнобедренного треугольника с углом наклона b(tgb = Umax). Построенный таким образом переходный процесс является оптимальным с учетом ограничения только ускорения. В данном случае получено релейное управление с двумя интервалами включения реле.
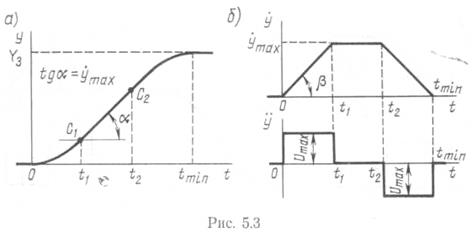
Если, например, по условиям работы объекта, являющегося идеальным интегратором второго порядка, ограничены скорость и ускорение изменения выходной переменной [см. (5.4) и (5.6)], то на графике у(t) будет участок С1–С2, определяемый постоянной скоростью, равной уmax в пределах от t1 до t2, а вторая производная на этом участке равна нулю (рис. 5.3,а,б). Переходный процесс системы до точки С1 соответствует разгону с максимально возможным ускорением u = + Umax при нарастании скорости по линейному закону до предельного значения уmах. После точки С2 переходный процесс соответствует торможению с максимально возможным замедлением u=-Umax при убывании скорости от предельного значения до нуля. Полученный таким образом переходный процесс является оптимальным с учетом ограничений по первой и второй производным выходной переменной объекта. Закон управления объектом в данном случае характеризуется двумя интервалами включения реле и одним интервалом выключения реле между ними.
Ограничение по второй производной накладывается, например, по условиям механической прочности некоторых деталей устройств, а также электрической и тепловой защиты изоляции.
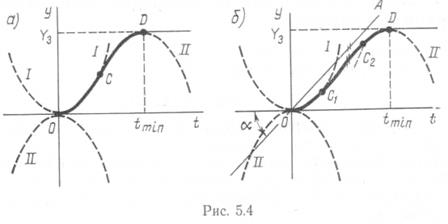
Пользуясь полученными параболами, можно указать разработанный А.А.Фельдбаумом графический способ построения кривой оптимального процесса для объектов, являющихся идеальными интеграторами второго порядка. Для этого в начале координат построим две параболы I и II по уравнениям (рис. 5.4,а):
 . (5.9)
. (5.9)
Парабола I перемещается параллельно себе в такое положение, в котором значение координаты выхода объекта равно начальной величине. При отсутствии ограничений первой производной парабола II перемещается также параллельно себе в такое положение, при котором она имеет точку касания D с линией заданного установившегося значения выходной переменной объекта и точку касания С с первой параболой I. На рис. 5.4,а показано построение для нулевых начальных условий, когда парабола I оставлена в исходном положении, а парабола II смещена параллельно себе вправо вверх. Участок кривой OCD, расположенный на параболах I и II, представляет собой оптимальный переходный процесс при ограничении только второй производной и соответствует переводу объекта из начального состояния у(0)=0 и  в состояние у(Т) = Yз и
в состояние у(Т) = Yз и  .
.
Если ограничены первая и вторая производные, то наносят параболы I и II и линию ОА, угол наклона а которой определяется предельным значением первой производной  , т. е.
, т. е.  (рис. 5.4,б). После того как первая парабола смещена в положение, соответствующее заданным начальным условиям, к ней проводят касательную, параллельную линии ОА в некоторой точке С1. Далее смещают параболу II до точки касания с линией заданного значения выходной переменной (точка D) так, что она касается также линии, проведенной из точки С1 параллельно ОА, в некоторой точке С2 (рис. 5.4,б, где при t=0 принято у = 0).
(рис. 5.4,б). После того как первая парабола смещена в положение, соответствующее заданным начальным условиям, к ней проводят касательную, параллельную линии ОА в некоторой точке С1. Далее смещают параболу II до точки касания с линией заданного значения выходной переменной (точка D) так, что она касается также линии, проведенной из точки С1 параллельно ОА, в некоторой точке С2 (рис. 5.4,б, где при t=0 принято у = 0).
Полученные графики оптимальных переходных процессов при наличии ограничений второй производной (см. рис. 5.2,а,б), а также первой и второй производных (см. рис.5.3) указывают на необходимость применения нелинейного закона управления регулирующим органом, обеспечивающего изменение знака ускорений и скоростей управляемой переменной в соответствующие моменты времени.
Рассматривая формы полученных кривых оптимальных переходных процессов для простейших объектов первого и второго порядков, следует указать на существенное влияние ограничений, накладываемых в реальных условиях на координаты и производные. Это в свою очередь определяет форму закона управления объектом. В приведенных примерах (см. рис. 5.2 и 5.3) следует применить релейный закон управления. При ограничении только первой производной получен один интервал, на котором изменяется выходная переменная объекта с постоянной скоростью (см. рис. 5.2,а). При этом в момент времени t=0 включается реле, задающее скорость, равную предельной величине u=Umax. a при t=tmin выключается реле, обеспечивающее равенство нулю скорости изменения выходной переменной.
В случае ограничения только второй производной получено два интервала (см. рис. 5.2,в), на первом из которых выходная переменная объекта изменяется с постоянным ускорением (участок 0 £ t £ tп), а на втором – с постоянным замедлением (участок tп £ t £ tmin).
Здесь при t = 0 включается реле, задающее ускорение, равное предельной величине u = +Umax, а при t = tп производится переключение реле, задающего замедление, равное предельной величине u = Umax (см. рис. 5.2,б). Таким образом, при ограничении второй производной требуется производить одно переключение реле.
Когда ограничены первая и вторая производные, кроме указанных интервалов ускорения и замедления, определяемых переключениями реле, имеется участок с постоянной скоростью изменения выходной переменной объекта при выключенном реле. На основании полученных оптимальных переходных процессов А.А.Фельдбаум сформулировал теорему об n интервалах. Доказательство этой теоремы дано авторами принципа максимума Понтрягина [12].
| <== предыдущая лекция | | | следующая лекция ==> |
| Определение вида и уровня договорной цены при заключении подрядного договора. | | | Химико-термическая обработка стали |
Дата добавления: 2019-07-26; просмотров: 236;