Конструкция и принцип действия асинхронного двигателя
Работа асинхронного двигателя основана на использовании вращающегося магнитного поля, которое создается статорной обмоткой под действием трехфазного тока. Обмотку статора двигателя соединяют звездой или треугольником в зависимости от напряжения сети. Так, например, если в паспорте двигателя указаны напряжения 380/220 В, то при линейном напряжении сети 380 В обмотки соединяют звездой, а при линейном напряжении 220 В — треугольником. Соединение звездой и треугольником выполняется при помощи перемычек на клеммном щитке двигателя, как показано на рис.1.
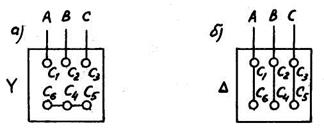
Рис. 1. Соединение фаз двигателя звездой (а) и треугольником (б).
Ток, потребляемый двигателем из сети и протекающий по обмотке статора, обозначают I1. Скорость вращения магнитного поля зависит от частоты тока f и числа пар полюсов р:
n1 = 60 f1 / р . ( 1 )
В роторной обмотке двигателя, пересекаемой вращающимся магнитным потоком, индуктируется переменный ток I2 , изменяющийся с частотой f2 .
Ток ротора, взаимодействует с вращающимся магнитным потоком Ф, создает электромагнитный вращающий момент.
М = кФI2соsψ2 , ( 2 )
где угол сдвига фаз между э. д. с. и током ротора - ψ2 .
Вращающий момент асинхронного двигателя пропорционален квадрату напряжения U1, которое приложено к статорной обмотке. Поэтому асинхронные двигатели очень чувствительны к колебаниям напряжения сети. Снижение напряжения вызывает уменьшение момента и может привести к остановке двигателя.
Скорость вращения ротора п2 у двигателя меньше скорости вращения магнитного поля п1. Величина s =( п1 – п2 ) / п1 ( 3 ) называется скольжением. Номинальное значение скольжения у различных асинхронных двигателей составляет 0,05÷0,1 или 5÷10%. Частота тока в роторе f2 пропорциональна s. Рабочие характеристики асинхронного двигателя выражают зависимость потребляемого тока I1, потребляемой мощности Р1 , вращающего момента М, скорости вращения ротора п2, скольжения s, к. п. д. η двигателя от мощности на валу Р2 .
Механическая характеристика двигателя выражает зависимость скорости вращения ротора от момента на валу М.
п 2 = f (M). ( 4 )
Так как момент двигателя зависит от скольжения, то иногда бывает удобнее вместо механической характеристики п2 = f (M) пользоваться
зависимостью М = f (s).
Рабочие и механические характеристики обычно строятся по результатам испытаний двигателя. Во время испытаний двигатель нагружается при помощи тормозного устройства, позволяющего измерять величину момента на валу двигателя.
В лабораторной работе: ИСПЫТАНИЕ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ в качестве тормозного устройства используется генератор постоянного тока, нагрузка у которого может регулироваться числом включенных ламп. Крутящий момент на валу двигателя определяется по имеющемуся графику в зависимости от тока нагрузки генератора.
Испытания полагается проводить при номинальном напряжении и стандартной частоте тока (50 Гц). Ток Iф , мощность Р1, скорость вращения ротора п2 во время испытаний определяются по показаниям измерительных приборов. Мощность двигателя определяется по формуле
Р2 = M n2 / 9550, ( кВт ) ( 5 )
где М — момент двигателя (Нм);
п2 - скорость вращения ротора (об/мин).
Коэффициент мощности cosφ и к.п.д. двигателя вычисляются по следующим формулам:
соsφ = Р1/3UфIф, ( 6 )
η = Р2 / Р1 . ( 7 )
Дата добавления: 2019-04-03; просмотров: 489;