Определение угла сноса по отметкам места ВС.
Порядок работы при этом способе следующий:
- определяют визуально или с помощью каких-либо технических средств СВЖ МС и отмечают его не карте;
- строго выдерживая курс, V и H полета через 5-15 мин полета таким же образом определяют и отмечают на карте второе МС. Полученные отметки МС соединяют прямой линией и с помощью транспортира измеряют ФИПУ;
- находят ФМПУ= ФМПУ – ( ±Δм) рассчитывают угол сноса УС= ФПМУ- МКср ;
- точность определения УС зависит от точности нанесения отметок МС на карту и точности определения среднего магнитного курса.
4.Радиотехнические средства ближней навигации предназначены для обеспечения ЭВС, оборудованных соответствующей бортовой аппаратурой и находящихся в зоне действия системы, радионавигационной информацией об А и Д относительно точки расположения наземного РМ.
Принцип работы по определению дальности ВС на ВС.
Для определения дальности ВС на ВС в системе РСБН-2 используется один из принципов радиолокации- постоянство скорости распространения радиоволн. Дальность определяется измерением суммарного времени распространения запросного сигнала с ВС на землю и ответного сигнала с земли на ВС. Это время пропорционально измеряемому расстоянию
Д= Vt|2 ; где Д- дальность от ВС до РМ в км.
V- скорость распространения радиоволн ( 300000км/сек)
t- время прохождения радиоволной расстояния от ВС до РМ и обратно.
Принцип на ВС в системе РСБН-2 определяется путем измерения временного интервала между начальным временем отсчета, одинаковым для всех самолетов, находящихся в зоне действия РСБН-2, и моментом приема азимутального сигнала каждым из них.
Контрольные вопросы:
1. Какие существуют разновидности наземных радиомаяков системы РСБН?
2. Как выполняют контроль пути ВС по направлению и дальности при помощи РСБН?
3. Какими способами определяют путевую скорость в полете?
4. Перечислите способы определения угла сноса в полете?
5. Для чего предназначены радиотехнические системы ближней навигации?
Ключевые слова:
РСБН, место ВС, путевая скорость, угол сноса, азимут ВС.
Лекция №13
Применение радиолокационной станции в полёте.
План:
1. Режимы работы БРЛС. Характеристики радиолокационного изображения местности на яркостном индикаторе.
2. Обнаружение и обход гроз при помощи радиолокатора «Гроза».
3. Расчет данных для обхода грозового очага стороной.
4. Пролет между двумя засветками от грозовых очагов.
5. Расчет данных для пролета грозового облака сверху.
6. Назначение и задачи решаемые радиолокатором «Гроза».
7. Изображение различных ориентиров на индикаторе радиолокатора.
8. Определение места самолета по ИПС и ГД при полетах с ОМПУ.
В зависимости от обстановки, станцию используют в нужном режиме.
Режим «готов» предназначен для того, чтобы станция после 3-5 – минутного прогрева была готова к немедленной работе.
В этом режиме на станцию подаётся питание, но высокое напряжение на передатчик не подаётся. Следует помнить, что даже при кратковременном полном выключении станции и последующем её включении реле времени автоматически выдерживает указанное выше время.
Поэтому в полёте полностью выключать БРЛС не следует. Если нет необходимости в использовании станции, следует перевести её в режим «готов».
Режим «земля» обеспечивает обзор земной поверхности.
На масштабах 30, 50 и 125 км используется веерный луч, на масштабе 250 км для повышения дальности обзора – поочерёдно веерный и узкий лучи, и на масштабе 375 км – только узкий луч.
Обнаружение и обход гроз при помощи радиолокатора «Гроза».
При полётах в районе грозовой деятельности радиолокатор позволяет обнаружить зоны грозовой деятельности, определять угловое положение гроз по отношению к оси самолёта, определять дальность до грозовой зоны и её протяжённость, определять степень вертикального развития грозовой зоны, определять направление обхода зон грозовой деятельности или направление наиболее безопасного пролёта участка зоны. Для обнаружения грозовых очагов и наблюдения за ними необходимо включить режим «метео» и переключателем наклона антенны установить её так, чтобы имеющаяся кучево-дождевая облачность засветилась.
Грозовые зоны хорошо отражают радиоволны и наблюдаются на экране в виде ярких засвеченных пятен. В режиме «метео» антенна работает узким лучом. Для обнаружения участков с наиболее активной грозовой деятельностью необходимо включить режим «контур». Если появились тёмные провалы в отражениях грозовой зоны, то это свидетельствует о наиболее опасных местах. Чем больше величина тёмных провалов, тем больше турбулентность в них, и, следовательно, они опаснее для полёта. Обнаруживать грозовые очаги следует заблаговременно на расстоянии не менее 100-120 км. Это даёт экипажу необходимое время для принятия решения и выполнения расчётов на обход гроз или пролёта между ними.
Расчёт данных для обхода грозового очага стороной.
На самолётах разрешается обходить грозовые очаги с помощью локатора на удалении не менее 15 км (рис.25)
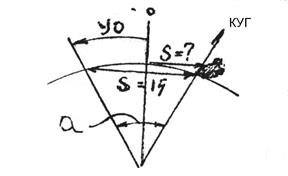
Рис. 25 Обход грозового облака стороной.
Решение
1.  КУГ = 7 км
КУГ = 7 км 

2. 

3. УО = Q – КУГ = 11-9 = 60 влево.
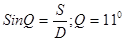
Пролёт между двумя засветками от грозовых очагов
В полёте встречается фронтальная облачность с отдельными грозовыми очагами, пересечение которой разрешается производить в том месте, где расстояние между грозовыми очагами составляет не менее 50 км (рис. 26).
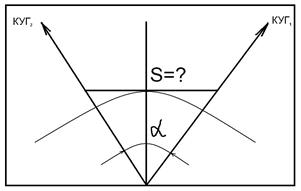
Рис. 26 Пролёт между двумя засветами
Пример:
КУГ1 = 150 ; КУГ2 = 100 ; D = 90 км
Решение:
1. 
2. 
3. Пролёт невозможен, для пролёт S ≥ 50 км.
Расчёт данных для пролёта грозового облака сверху.
При невозможности пролёта фронтальной облачности с определёнными засветками разрешается полёт с превышением не менее 500 м над верхней границей облаков по согласованию с диспетчером. Ручным управлением определяется превышение грозового облака над самолётом (рис. 27).
Пример:
D = 120 км
УП = 20
Vи = 9100 м
Решение:
1. α = УП – 1.50 = 0.50
2. Δh = D▪ tgα = 1050 м
3. Hнаб = Δh + 500 = 1050 + 500 = 1550 м
4. tпол = D/V = 3 мин
5. Vб = Hнаб/tпол = 3.3 м/с
 -----------
----------- 
 -----------
----------- 
 ---------
--------- 
включить в положения «YOR – 1», «YOR – 2». На – 5 включить кнопку – лампу «АЗ – 1». На левом ПНП-1 загорится подсветка «YOR», уберется бленкер «К», а курсовая планка укажет сторону ЛЗП. Вывести самолет на линию заданного пути рукояткой «Разворот», подобрать курс с учетом УС и выполнять полет по ЛЗП ноль вождением по прибору ПНП – 1 левого пилота. Управление самолетом от рукоятки «Разворот».
Дата добавления: 2019-02-07; просмотров: 513;