Актуальность автоматизации серийного производства
Актуальность создания гибких производственных систем (ГПС) заключается в необходимости автоматизации серийного машиностроительного производства. Они являются промежуточным этапом в создании целых гибких автоматизированных производств (ГАП), охватывающих все предприятие.
В настоящее время серийное производство является ведущим видом производства, на долю которого приходится 75 – 80 % всего объема продукции машиностроения. При этом детали изготавливаются сравнительно небольшими партиями.
Отмечается отставание автоматизации мелко- и среднесерийного производства в сравнении с крупносерийным и массовым, вследствие некоторых специфичных особенностей.
На процесс автоматизации в этих условиях влияют следующие факторы:
· частая сменяемость деталей и конструкций выпускаемых изделий;
· постоянное сокращение сроков выпуска деталей с одновременным увеличением номенклатуры (номенклатура – количество типоразмеров деталей, проходящих через данную автоматическую линию или участок);
· постоянно увеличивающиеся требования по точности изготовления деталей и качеству их обработки;
· сравнительно малая доля основного технологического времени во всем производственном цикле изготовления деталей.
Последнюю особенность можно подтвердить диаграммой (рис. 1).
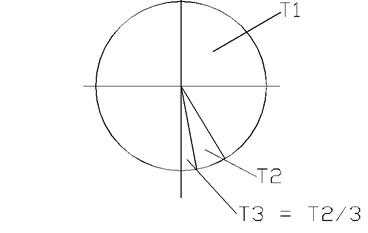
Рис. 1. Диаграмма распределения времени обработки деталей
Здесь Т1 – время всего производственного цикла получения деталей;
Т2 = 0,05 Т1 – среднее время нахождения детали на станке. Остальное время расходуется на ожидание деталью своей очереди на обработку, транспортировку, контроль и т.п. вспомогательные операции (около 95 % всего производственного цикла);
Т3 ≈ 2/3 Т2 – время непосредственно затрачиваемое на обработку детали, т.е. на изменение размеров и формы поверхностей, их взаимного расположения и их механических свойств. Остальное время идёт на загрузку и разгрузку детали на станок, на контроль без снятия детали со станка, на время управления станком и т.д.
Можно сделать вывод: в современном производстве объектом автоматизации могут служить не только основные технологические операции, но и все перечисленные вспомогательные операции. Обоснование в том, что время Т3 уже предельно сокращено и большого выигрыша в повышении эффективности производства не даёт.
Значительные дополнительные сложности возникают при автоматизации сборочного серийного производства. Они обусловлены:
1) непостоянством формы и размеров некоторых деталей, поступающих на сборку (например, уплотнения, манжеты, прокладки и т. д.);
2) чрезвычайно большим разнообразием деталей, входящих в изделие, что диктует необходимость проектирования широкоуниверсального оборудования, а также большого числа устройств технологического оснащения;
3) требованием обеспечения высокой точности ориентации деталей перед их соединением;
4) недостаточной производительностью существующих видов сборочного автоматизированного оборудования, которое не всегда может конкурировать с опытным рабочим-сборщиком.
В этих условиях во всем мире основным направлением автоматизации серийного машиностроительного производства признано создание ГПС. Это совокупность основного технологического оборудования (станков и роботов), комплекта вспомогательных устройств, режущего инструмента, а также переналаживаемой технологической оснастки, объединенных общей системой управления, предназначенная для получения деталей заданной номенклатуры, предусмотренного объема выпуска, в установленные сроки и требуемого уровня качества.
В этом случае производство становится переналаживаемым (многономенклатурным), а выбор оборудования базируется на применении станков с числовым программным управлением (ЧПУ) и промышленных роботов (ПР). При этом автоматизации подлежат не только основные операции механической обработки, но также заготовительные операции, сборка, контроль, транспортирование, испытания, консервация и упаковка готовой продукции.
Из вспомогательных операций особое внимание уделяется операциям:
- по доставке заготовок на рабочие позиции;
- транспортированию оснастки и инструмента;
- удалению стружки и других отходов из зоны резания;
- контролю и измерению обработанных деталей.
Всем перечисленным операциям соответствуют по своим возможностям современные промышленные роботы.
§2. Гибкие производственные системы – основной вариант
автоматизации серийного производства
1. Эффективность внедрения гибких производств
В сравнении с неавтоматизированным производством ГПС обеспечивают:
1) уменьшение числа станков для осуществления производства до 8 раз;
2) сокращение обслуживающего количества персонала до 5 раз;
3) уменьшение потребных производственных площадей до 4 раз;
4) сокращение времени обработки партии деталей в 3–4 раза;
5) уменьшение времени переналадки оборудования – до 6 раз, т.к. предусматриваются меры по автоматизации переналадки;
6) увеличение прибыли промышленного производства до 3 раз;
7) увеличение коэффициента загрузки станков на 30%.
8) сокращение себестоимости обработки и сборки до 10%.
Последний показатель незначителен из-за сравнительно больших дополнительных капиталовложений.
2. Причины и основания возникновения данного вида производства
Существует два вида причин, вытекающих из условий современного серийного производства – необходимая и достаточная.
Первая необходимая причина. В современной промышленности возникла необходимость в быстрой смене выпускаемых изделий, а также в увеличении их номенклатуры и в повышении качества. Средний срок выпуска одной и той же продукции серийного производства равен примерно четырем годам.
Вторая необходимая причина. В современном обществе возникло резко отрицательное отношение к монотонному однообразному труду. Пример – ручное управление станками в обычном производстве или ручная сборка.
Достаточная причина:
В настоящее время средства производства достигли необходимого уровня развития для практической реализации указанного направления.
Первые ГПС появились еще в начале 60-х годов прошлого века.
К тенденциям развития гибких производств относят следующее:
- до 70% действующих ГПС предназначено для обработки сложных корпусных деталей; при этом отмечается повышенная загрузка станков с ЧПУ;
- число позиций в них колеблется от 2 до 40, но 80% из имеющихся систем содержит до 10 автоматизированных позиций;
- транспортирование деталей более сложной (некруглой) формы производится преимущественно в приспособлениях-спутниках. Для деталей цилиндрической формы применяются простые приспособления-паллеты в сочетании с пристаночными накопителями;
- в системах управления технологическим оборудованием чаще всего применяются системы ЧПУ станков или роботов.
3. Данные о распределении ГПС по сферам производства
Первое место занимают системы, связанные с обработкой резанием (50% от общего числа ГПС);
- второе – обработка деталей пластическим деформированием (штамповка, гибка, формовка, чеканка … – примерно 20%);
- третье – обработка с термическим воздействием, сварка, литье (до 15%);
- четвертое – сборка изделий (около 5%);
- прочие виды производств составляют около 10%.
Ограниченному применению ГПС на операциях сборки имеется объяснение: необходимость обеспечения высокой точности взаимной ориентации собираемых деталей в автоматическом режиме; короткий цикл сборки в сравнении с общим вспомогательным временем; сложность технологической оснастки; большое разнообразие деталей-компонентов по форме, размерам, материалу и массе; малая жесткость некоторых деталей-компонентов изделия и непостоянство их формы.
Проблемы, требующие дальнейшего решения для эффективного применения ГПС:
1) постоянное уменьшение деталей в партии при их изготовлении;
2) повышение требований по точности и качеству изделий;
3) выпуск все более сложной и дорогостоящей продукции;
4) возникший дефицит квалифицированных производственных кадров;
5) ограничение по производственным площадям в действующем производстве.
Все вышеизложенное говорит об особой значимости промышленных роботов в ходе автоматизации производственных процессов. Наряду с металлорежущим оборудованием они представляют вторую основную разновидность автоматизированного оборудования. Этот вид технологического оборудования представляется не менее важным, чем металлообрабатывающие станки с ЧПУ. Более того, роботы могут применяться на операциях, которые напрямую не связаны с механообработкой. Это сборка изделий, сварка, штамповка, литье, термообработка, нанесение покрытий, контроль, складирование и т.п. операции.
К перспективным операциям по замене ручного труда применением роботов являются также утомительные, однообразные, физически трудновыполнимые операции, сопряженные с мелкими или слишком тяжелыми объектами производства.
Особое место роботы занимают в автоматизации производства с вредными и опасными условиями труда, где пребывание человека нецелесообразно либо вообще недопустимо.
Далее рассмотрим ряд вопросов, связанных с особенностями роботизации производства. Учитывая ограничения по объему данного учебного пособия, сделаем это фрагментарно, в виде отдельных конкретных примеров.
Дата добавления: 2017-10-09; просмотров: 1788;