Интегрирующее устройство
Интегрирующее устройство ( ИУ ) предназначено для устранения ( компенсации ) влияния на судно несимметричных внешних воздействий – волны, ветра.
Такие воздействия постепенно изменяют курс судна, что недопустимо. На судах, где авторулевые не имеют ИУ, в течение вахты вахтенному помощнику приходится пери
одически вносить поправки в курс судна, что усложняет несение вахты на мостике.
В авторулевом АТР2-10 в состав ИУ входят 3 электрические машины:
1. сельсин-трансформатор курса СТ1 ( ПУ, М5 );
2. двигатель интегратора Ди ( ПУ, М9 );
3. сельсин-трансформатор интегратора СТи ( ПУ, М10 ).
При уходе судна с курса ротор СПк ( ПУ, М7 ) разворачивает ротор СТ1 ( ПУ, М5 ). Выходное напряжение последнего через контакты ВК1-4 и В12 подаётся на обмот-
ку управления двигателя интегратора Ди ( ПУ, М9 ).
Ротор Ди через редуктор с большим передаточным отношением ( ι = 40 000 ) связан с ротором СТи.
Рассмотрим работу интегрирующего устройства в двух случаях:
1. судно рыскает симметрично относительно линии курса ( рис. 289, а );
2. судно рыскает несимметрично относительно линии курса, т.к. возникли внешние
несимметричные силы ( волна, ветер ), уводящие судно с курса ( рис. 289, б ).

Рис.289. Траектория движения судна при симметричных ( а ) и несимметричных
( б ) рысканиях судна относительно курса
В хорошую погоду ( рис. 289, а ) судно рыскает симметрично относительно курса на одинаковые углы α1 ( вправо ) и α2 ( влево ), причём одинаковы также промежутки вре-
мени рыскания t1 и t2.
Ротор СТ1 в течение промежутков времени t1 и t2 поворачивается на одинаковые углы в разные стороны.
При этом двигатель интегратора Ди совершает одинаковое число оборотов в раз-
ные стороны, т.е. за время ( t1 + t2 ) остаётся на месте ( точка С ).
Поэтому при симметричных рысканиях судна относительно курса ротор СТи не по
ворачивается.
При несимметричном рыскании ротор СТ1 поворачивается в одну сторону на боль
ший угол, чем в другую (α1 > α2 ) .
При этом неодинаковы не только углы поворота ротора СТ1, но и промежутки вре-
мени, в течении которых ротор СТ1 был повернут (t1> t2 ).
Поскольку на отрезке времени t2 ротор СТ1 развернут на больший угол, чем на отрезке времени t1 , выходное напряжение СТ1, а значит, и скорость вращения ротора Ди
Будет больше, чем на отрезке времени t1 .
Поэтому ротор двигателя Ди на отрезке времени t2 вращается быстрее и дольше,
чем на отрезке времени t1 . В результате ротор СТи начнет медленно поворачиваться и че-
рез 30...40 мин остановится.
При этом на выходе СТи появится напряжение
U3 = к3  α dt,
α dt,
в котором:
1. α - алгебраическая сумаы углов рыскания судна в разные стороны;
2. dt = t – время накопления сигнала интегратора , т.е. время, в течение
которого поворачивался ротор СТи, т.е. судно рыскало несимметрчно и накапливался си-
гнал ИУ.
В авторулвых типа АТР это время составляет от 30 до 40 мин.
Поскольку через 30…40 мин ротор СТи остановится, в дальнейшем напряжение
U3 не будет изменяться не по величине, ни по фазе.
В результате появления этого напряжения судно станет идти по курсу, совершая
относительно курса симметричные рыскания ( как если бы ветра и волны не было ).
Причина этого в том, что за счёт напряжения U3 на выходе СТи кладки пера руля в
разные стороны стали неодинаковыми, несимметричными.
Для доказательства рассмотрим момент остановки пера руля.
Для этого момента справедливо уравнение
Uу = U1 ± U3 – U5 = 0
где: U1 = к1 α – выходное напряжение СТк ( ПУ, М2 );
U3 = к3 α dt – выходное напряжение СТи ( ПУ, М10 );
U5 = к5 β - выходное напряжение СТр ( РД, М2 ).
Физический смысл уравнения состоит в том, что судно не на курсе ( U1 ≠ 0 ), руль
не в диаметральной плоскости ( U5 ≠ 0 ), на выходе ИУ накопился сигнал (U3 ≠ 0 ).
Из уравнения следует
U5 = U1 ± U3.
Отсюда видно, что в момент остановки пера руля в одном случае напряжение
U'5 = U1 + U3,
а в другом
U"5 = U1 - U3,
причём U'5 > U"5, значит, β' > β" .
Иначе говоря, при наличии сигнала ИУ углы кладки пера руля на левый и правый борта становятся неодинаковыми.
Разным углам кладки соответствуют неодинаковые моменты на баллере руля: Мб' > Мб".
Можно условно считать, что к баллеру руля постоянно приложен разностный мо
мент ΔМб = Мб' - Мб" , имеющий знак большего момента, т.е. Мб'.
Этот момент ΔМб направлен навстречу моменту внешних сил Мвн и компенсирует
его( рис. 290 ).
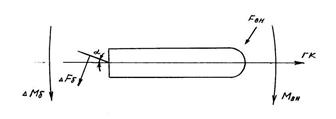
Рис. 290. Образование на баллере руля избыточного момента:
ГК – генеральный курс судна; Fвн – внешние силы ( ветер, волна ), уводящие судно с курса; Мвн – момент внешних сил; ΔFб – равнодействующая сила на баллере, возникаю-
щая при неодинаковых кладках пера руля в разные стороны; ΔМб – разностный момент на баллере
В результате после окончания накопления сигнала интегрирующего устройства
( 30…40 ми ) судно станет рыскать относительно курса симметрично, т.е так, как если бы несимметричных внешних воздействий ( ветер, волна ) не было бы.
При повороте ротора СТи ( ПУ, М10 ) в ту или иную сторону замыкается левый
( как на рис. 286 ) или правый контакт контактного приспособления КП-2, подготавливая узел интегратора к сбросу напряжения U3 на нуль в случае перехода с автоматического управления на следящее или простое ( см. ниже ).
Дата добавления: 2017-08-01; просмотров: 729;