Узел возврата штурвала
Предназначен для автоматического возвращения штурвала в случае, если рулевой матрос уберёт руки со штурвала.
Узел работает только в режиме «Следящее управление» ( рис. 286 ).
В этом режиме через контакт ВК1-6 на обмотку возбуждения двигателя возврата штурвала Дс ( ПУ, М6 ) подаётся напряжение 110 В, 50 Гц. Через контакт ВК1-4 обмотка управления Дс подключается к выходной обмотке сельсина-трансформатора СТ1 ( ПУ, М5 ).
Далее узел работает так.
При повороте штурвала, кроме ротора СТк ( ПУ, М2 ), поворачивается ротор СТ1, на выходе которого появляется напряжение, которое через контакт ВК1-4 поступает на об-
мотку управления Дс.
На валу Дс возникает вращающий момент, противодействующий повороту штурва-
ла. Однако этот момент меньше момента, создаваемого на штурвале руками рулевого мат-
роса. Поэтому двигатель Дс не вращается, а стоит под током.
Если рулевой матрос уберёт руки со штурвала, двигатель Дс станет возвращать штурвал в нулевое положение. При этом, также в нулевое положение, станет возвращать-
ся ротор сельсина-трансформатора СТ1, выходное напряжение которого станет постепен-
но уменьшаться. Поэтому скорость возврата штурвала так же постепенно уменьшается.
В момент времени, когда двигатель Дс вернёт штурвал в нулевое положение, ротор сельсина-трансформатора СТ1 также вернётся в нулевое положение.
Выходное напряжение СТ1, поступавшее на обмотку управления Дс, исчезнет, дви-
гатель Дс остановится, перед этим успев вернуть штурвал в нулевое положение.
Таким образом, этот узел предотвращает создание аварийной ситуации, при кото-
рой невозврат штурвала в нулевое положение в отсутствие контроля со стороны вахты на мостике за действиями рулевого матроса привёл бы к тому, что судно стало бы описывать циркуляцию.
В данном случае, автоматический возврат штурвала в нулевое положение заставит судно двигаться по прямой, что менее опасно, чем при движении по кругу.
Авторулевой типа АИСТ
Основные сведения
Авторулевой типа АИСТ предназначен для управления гидравлическими рулевыми машинами типизированного ряда.
Эти авторулевые имеют буквенно-цифровое обозначение, состоящее из букв АИСТ и последующих трёх цифр, например: АИСТ1-10.
Цифры после букв обозначают следующее:
1. первая – тип насоса рулевой машины ( 1 – насос постоянной подачи, 2 – переменной подачи );
2. вторая – число пультов управления ПУ;
3. третья - число пультов следящего управления ПСУ.
Отличие между ПУ и ПСУ следующее.
ПУ предусматривает 3 вида управления рулевым приводом – автоматиче-
ское, простое и следящее, ПУ – только следящее.
Место установки ПУ – мостик или рулевая рубка, ПCУ – навигационная палуба ( выше палубы мостика ).
Кроме того, после цифр ставятся буквы, которые обозначают:
А – в систему входят узлы сопряжения с аппаратурой программного управ-
ления;
Д – система включает две рулевые машины;
П – пульты выполнены в виде части главного общесудового пульта управления;
Т – приборы изготовлены в тропическом исполнении.
Таким образом, обозначение АИСТ1-10 означает следующее: авторулевой,
предназначенный для работы с рулевыми машинами типизированного ряда, руле-
вая машина с насосом постоянной подачи, пульт управления –1, пульт следящего управления – отсутствует.
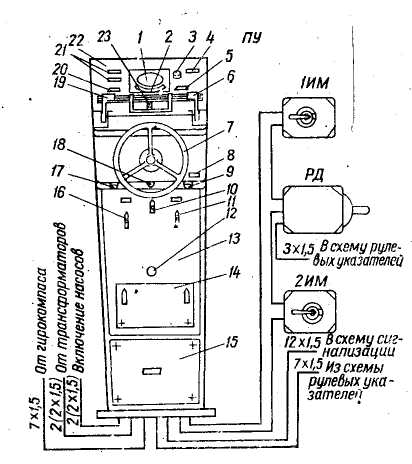
Рис. 291. Пульт управления и схема соединений авторулевого типа АИСТ:
1 – указатель курса ( репитер гирокомпаса );
2 – указатель положения пера руля ( рулевой аксиометр );
3 – гнездо для согласования курса;
4 – лампа сигнальная «Автомат»;
5 – ручка переключения КОС со шкалой;
6 – клавиша нажимная «Право руля»;
7 - штурвал;
8 – ручка для фиксации штурвала;
9 – регулятор яркости накала ламп сигнализации;
10 – переключатель сигнализации ухода судна с курса;
11 – переключатель «Пуск насоса левого борта»;
12 – кнопка снятия сигнала ревуна при перегрузке насосов;
13 – средняя крышка пульта ( на петлях );
14 – лючок для доступа к предохранителям;
15 - нижняя крышка пульта ( на петлях ), для доступа к отходящим кабелям;
16 - переключатель «Пуск насоса правого борта»;
17 - регулятор яркости накала ламп подсветки шкал указателей курса и руля;
18 – переключатель чувствительности «Грубо- точно»
19 – клавиша нажимная «Лево руля»;
20 – ручка регулятора сигнала тахогенератора ( производной );
21- лампы сигнальные «Следящее управление», «Простое управление»;
22 - верхняя крышка пульта ( на петлях );
23 - переключатель видов управления.

На рисунке 291 обозначены:
1. ПУ – пульт управления, на ходовом мостике;
2. 1ИМ, 2ИМ – исполнительные механизмы, по одному на каждую рулевую маши
ну; находятся в румпельном отделении;
3. РД – рулевой датчик, в румпельном отделении.
На корпусах ИМ показаны рукоятки аварийного ручного управления с зажимами-фиксаторами.
При нормальной работе эти рукоятки зафиксированы в нейтральном положении и не влияют на работу насоса. При аварийном ручном управлении рукоятки выводятся из зажимов и при этом механически соединяются с гидрозолотником.
Поворот рукоятки на определённый угол изменяет подачу насоса, а значит, ско-
рость перекладки руля. Изменение же направления поворота рукоятки относительно ней-
трального положения приводит к изменению направления перекладки руля.
От пульта управления ПУ к исполнительным механизмам1ИМ и 2ИМидут двамногожильных кабеля .
Рулевой датчик РД связан с исполнительными механизмами также двумя много-
жильными кабелями .
Кроме того, в пульт входят:
1. многожильный кабель 7х1,5 от гирокомпаса;
2. двухжильный кабель 2х( 2х1,5 ) от понижающих трансформаторов;
3. двухжильный кабель 2х( 2х1,5 ) «Включение насосов», для включения
приводных двигателей насосов рулевых машин;
4. многожильный кабель 12х1,5 в схему сигнализации;
5. многожильный кабель 7х1,5 от рулевых указателей.
Основные элементы пульта показаны в подрисуночной подписи к рис. 277.
Функциональная схема авторулевого типа АИСТ ( рис. 292. )
Во всех модификациях авторулевых типа АИСТ управление осуществляется по
закону ПИД, т.е. пропорционально курсовой погрешности ( П ), её интегралу ( И ) и диф-
ференциалу ( Д ).
Авторулевой АИСТ имеет электронный блок коррекции БК, предназначенный для
выработки сигналов ( напряжений ), пропорциональных интегралу и дифференциалу кур
совой погрешности ( углу ухода судна с курса ).
В авторулевых типа АТР этот блок – электромеханический, на 4-х электрических микромашинах ( см. рис. 286, схема авторулевого типа АТР2-10 ).
Таким образом, авторулевые типа АИСТ по сравнению с авторулевыми типа АТР имеют упрощенную кинематическую часть, что повышает их надёжность и упрощает об-
служивание.
В качестве угловых датчиков в авторулевом типа АИСТ использованы бесконтакт-
ные сельсины.
В последних модификациях авторулевого АИСТ:
1. внутри ПУ установлен только один сельсин-приёмник-курса СПк, ротор которо
го механически связан с картушкой репитера и кинематикой прибора ( в авторулевых ти-
па АТР использовалось два сельсина-приёмника, ротор одного механически связан с кар-
тушкой репитера, а ротор другого - с кинематикой прибора ). Таким образом, этот сель-
син выполняет две функции – служит в качестве указателя курса ( по картушке ) – на рис. 278 это сельсин-приемник курса ВЕ-1, и одновременно разворачивает ротор сельсина-трансформатора курса – на рис. 292 это ВС-3 ).
2. отсутствует узел самовозврата штурвала.
Приведенная на рис. 292 схема взята из учебника Головина Ю.К. «Судовые электри
ческие приводы» 1991 г. издания ( рис. 122 ). На рис. 122 допущены две ошибки:
1. в схемах электронных дифференцирующего ДУ и интегрирующего ИУ устрой
ств после демодуляторов ДМ пропущены вторые модуляторы М2;
2. положения переключателя усилителя мощности А1 «Точно» и «Грубо» на схеме перепутаны – на самом деле в положении «Точно» контакт SA3 должен быть разомкнут, в положении «Грубо» - замкнут.
Эти ошибки в схеме на рис. 292 отсутствуют.
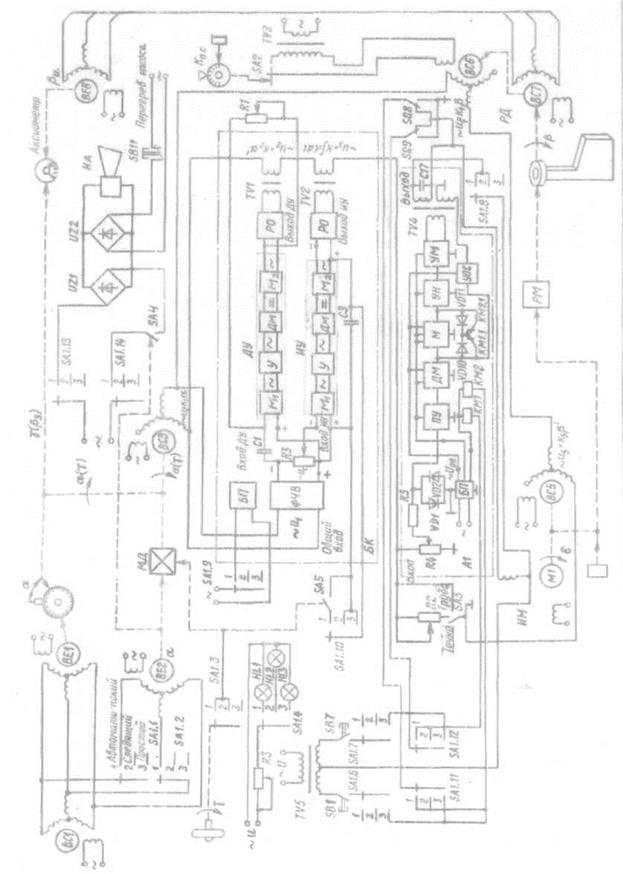
Рис. 292. Функциональная схема авторулевого типа АИСТ
К основным элементам схемы относятся ( рис. 292 ):
1. ВС1 – сельсин-датчик курса, ротор которого механически связан с ротором ази-
мут-мотора гирокомпаса.
Если судно на курсе, ротор ВС1 неподвижен; при уходе судна с курса ротор ВС1 также поворачивается, и на его выходной 3-фазной обмотке появляется напряжение, посту
пающее на 3-фазные обмотки синхронизации двух сельсинов-приёмников курса - ВЕ1 и ВЕ2;
2. ВЕ1 – первый сельсин-приёмник курса.
Его ротор механически связан с картушкой, что позволяет знать курс судна в лю-
бой момент времени;
3. ВЕ2 – второй сельсин-приёмник курса.
Его ротор механически связан через механический дифференциал МД с ротором
сельсина-трансформатора курса ВС3;
4. ВС3 - сельсин-трансформатор курса.
Предназначен для получения напряжения U1 = к1 α, пропорционального углу ухода
судна с курса ( углу рыскания ) α;
5. ВС5 – сельсин-трансформатор насоса ( в исполнительном механизме насоса
Холла в румпельном отделении ).
Предназначен для получения напряжения U5 = к5 s, пропорционального смещению ( ходу ) «s» барабана насоса.
Поскольку скорость кладки пера руля прямо пропорциональна ходу барабана, выра
жение U5 = к5 s часто записывают в таком виде:
U5 = к5 β',
где: β – угол перекладки руля;
β' – производная от угла ( по времени ), т.е. скорость кладки пера руля.
6. ВС6 – первый сельсин-трансформатор руля ( связан с баллером руля в румпель-
ном отделении ).
Предназначен для для получения напряжения U4 = к4 β, пропорционального углу поворота пера руля.
Далее это напряжение поступает в цепь суммирования сигналов и служит для уп
равления насосом Холла;
7. ВС7 – второй сельсин-трансформатор руля или, иначе, сельсин-датчик руля
( связан с баллером руля ).
Предназначен для получения напряжения U4 = к4 β, пропорционального углу пово
рота пера руля.
Далее это напряжение поступает на 3-фазную обмотку сельсина-указателя положе
ния пера руля ( сельсина-приёмника ) ВЕ8;
8. ВЕ8 – сельсин-приёмник положения пера руля в рулевой рубке , на его роторе
закреплена стрелка указателя положения пера руля ( рулевого аксиометра ).
Таким образом, сельсины ВС-7 и ВЕ-8 образуют систему синхронной связи, предна
значенную для измерения угла поворота пера руля;
9. М1 – серводвигатель руля, для перемещения барабана насоса Холла;
10. ТV1 – выходной трансформатор электронного дифференцирующего устройства
( ЭДУ ).
Его выходное напряжение
U2 = к2 dα / dt ,
где: dα / dt – скорость изменения курсового угла судна;
11. ТV2 - выходной трансформатор электронного интегрирующего устройства
( ЭИУ ). Его выходное напряжение
U 3 = к3  α dt ,
α dt ,
т.е. пропорционально алгебраической сумме углов рыскания судна, а также времени, в те-
чении которого судно совершало несимметричные рыскания относительно линии курса;
12. ТV3 – трансформатор, с его вторичной обмотки напряжение подаётся на обмот-
ку возбуждения сельсина-трансформатора руля ВС6.
Это напряжение можно плавно изменять при помощи переключателя SA2 и тем са-
мым регулировать значение коэффициента обратной связи КОС в пределах 0,2…2,0;
13. ТV4 – выходной трансформатор усилителя мощности А1.
Он имеет первичную и две вторичных обмотки. На его первичную обмотку подает
ся напряжение с выхода усилителя мощности УМ.
Напряжение с верхней ( на схеме ) вторичной обмотки через контакт SA1.8 пере
ключателя видов управления SA1 подаётся на обмотку управления серводвигателя руля М1 при работе в режимах «Автомат» и «Следящее управление».
Напряжение с нижней вторичной обмотки подаётся на вход усилителя обратной
связи УОС. Это напряжение находится в противофазе со входным напряжением усилителя А1, снимаемым с потенциометра R4 через резистор R5 и предназначено для предотвраще-
ния возникновения автоколебаний пера руля.
Эти автоколебания возникают в усилителе А1 при больших коэффициентах усиле-
ния, превращающих усилитель в генератор периодических колебаний.
Частота и амплитуда таких автоколебаний определяется параметрами самого усили
теля.
При возникновении таких автоколебаний нарушается работа авторулевого;
14. ТV5 – питающий трансформатор режима «Простое управление». От его полуоб
моток через кнопки SB1 «Право руля» и SB2 «Лево руля» питается обмотка управления серводвигателя руля М1 в режиме «Простое управление»;
15. БК – блок коррекции, включает в себя блок питания БП полупроводниковых
элементов блока коррекции, фазочувствительный выпрямитель ФЧВ, а также электронное дифференцирующее устройство ЭДУ с выходным трансформатором ТV1 и электронное интегрирующее устройство ЭИУ с выходным трансформатором ТV2;
16. SA1 – переключатель видов управления: 1 - «Автоматический», 2 –«Следящий»,
3 – «Простой».
Имеет 14 контактов SA1…SA14.
Назначение контактов такое:
1. SA1.1, SA1.2 – для подключения 3-фазной обмотки сельсина-приёмника курса
ВЕ2 к 3-фазной обмотке сельсина-датчика курса ВС1 в режиме «Автоматический»;
2. SA1.3 – контактное приспособление на валу переключателя видов управления
SA1.
В режиме «Автоматический» замыкает контакт SA1.5 в случае поворота штурвала. При этом через контакты SA1.5 и SA1.10 образуется цепь разряда накопительного конден
сатора С3 интегрирующего устройства и тем самым сбрасывается напряжение на выходе интегрирующего устройства;
3. SA1.4 – для включения сигнальных ламп НL1…НL3 режимов работы авторулево
го. Лампа НL1 горит в режиме «Автоматический», НL2 – в режиме «Следящий», НL3 – в режиме «Простой». Контакт SA1.5 на схеме отсутствует ( не путать с контактом SA5 );
4. SA1.6, SA1.7 – для подготовки цепи обмотки управления серводвигателя руля
М1 в режиме «Простой» ( через кнопки SB1 «Право руля» и SB2 «Лево руля» );
5. SА1.8 – для подключения в режимах «Автоматический» и «Следящий» обмотки
управления серводвигателя руля М1 к верхней вторичной обмотке выходного трансформа
тора TV4 усилителя мощности А1;
6. SА1.9 - для подключения в режиме «Автоматический» напряжения питающей
сети к блоку питания БП, входящему в состав блока коррекции БК;
7. SА1.10 – для образования цепи разряда накопительного конденсатора С3 и, тем
самым, сброса сигнала интегрирующего устройства через контакт SA5 в таких случаях:
а ) при режиме «Автоматическое» - при повороте штурвала с целью задания нового курса судна;
б ) при переходе с режима «Автоматический» на режимы «Следящий» или «Про-
стой»;
8. SА1.11, SА1.12 – для образования цепей конечных выключателей SQ8 и SQ9,
прерывающих кладку пера руля при углах 32-33º ( более подробно – см. ниже ).
9. SА1.13, SА1.14 – для подготовки цепи питания сигнального ревуна НА, включа-
ющегося в 2-х случаях:
а ) в режиме «Автоматический» в случае отклонения судна от курса на угол, боль-
ший заданного переключателем SA4.
Переключатель имеет 4 фиксированных положения : «выключено», «отклонение от курса 3º», «отклонение от курса 6º», «отклонение от курса 9º»;
б ) при перегрузке ( по току ) приводных двигателей насосов рулевой машины;
10. SA2 – переключатель, для регулирования напряжения на обмотке возбуждения
сельсина-трансформатора руля ВС6.
Ползунок переключателя связан со стрелкой-указателем «Регулировка КОС». При перемещении переключателя стрелка скользит вдоль шкалы с делениями в пределах 0,2…2,0;
11. SA3 – переключатель «Грубо-точно» на входе усилителя мощности А1.
Переключатель устанавливают в положение «Грубо» в штормовую погоду, «Точ-
но» - в хорошую;
12. SA4 - переключатель для включения ревуна НА при уходе судна с курса на оп
ределённый угол в режиме «Автоматический»;
Имеет 4 фиксированных положения : «выключено», «отклонение от курса 3º», «от-
клонение от курса 6º», «отклонение от курса 9º»;
13. SА5 – замыкается в режиме «Автоматический» в случае поворота штурвала.
При этом через контакты SA5 и SA1.10 образуется цепь разряда накопительного конденсатора С3 интегрирующего устройства и тем самым сбрасывается напряжение на выходе интегрирующего устройства;
14. SB1 – кнопка «Лево руля»;
15. SB7– кнопка «Право руля»;
16. SB11 – кнопка сброса сигнала ревуна при перегреве приводных двигателей насо
сов рулевой машины;
17. UZ1, UZ2 – выпрямительные мостики, для питания постоянным током ревуна
НА.
Переменное напряжение на вход мостика UZ1 подаётся через контакты SA1.13, SA1.14 и контакт SA4 при уходе судна с курса на 3, 6 или 9º, на вход мостика UZ2 – при перегрузке приводных двигателей насосов рулевой машины;
18. МД – механический дифференциал, для передачи вращающего момента на ро-
тор сельсина-трансформатора курса ВС3 двумя способами:
а ) при режиме «Автоматический» - от ротора сельсина-приемника курса ВЕ2;
б ) при режиме «Следящий» - от штурвала;
19. SQ1, SQ2 – контакты конечных выключателей «Лево» и «Право», переключают-
ся при предельных кладках пера руля 32-33º ( более подробно – см. ниже );
20. КМ1, КМ2 – электромагнитные реле, включающиеся через контакты SQ1, SQ2
при предельных кладках пера руля 32-33º ( более подробно – см. ниже );
21. ИМ – исполнительный механизмнасоса Холла;
22. РМ – рулевая машина;
23. РД – рулевой датчик.
Принцип действия авторулевого «АИСТ» точно такой, как и авторулевого АТР (
см. выше описание «Авторулевой типа АТР2-10» ), поэтому рассмотрим узлы, устроенные в авторулевом «АИСТ» иначе, чем в авторулевом АТР, и в первую очередь, блок коррек-
ции.
Блок коррекции
В состав блока коррекции ( БК ) входят:
1. блок питания БП;
2. фазочувствительный выпрямитель ФЧВ;
3. электронное дифференцирующее устройство ДУ;
4. электронное интегрирующее устройство ИУ .
Блок питания служит для получения напряжения постоянного тока, подаваемого
на электронные элементы ДУ и ИУ.
В состав БП входят ( на данной схеме не показаны ) понижающий трансформатор, выпрямитель, фильтр и 2 стабилизатора выпрямленного напряжения ( один – для ДУ, второй – для ИУ ).
Фазочувствительный выпрямитель ФЧВ служит для получения напряжения посто-
янного тока.
В отличие от обычного выпрямителя, ФЧВ имеет добавочное свойство: полярность выпрямленного напряжения зависит от фазы входного перемен-
ного напряжения.
Это означает, что при изменении фазы переменного входного напряжения на 180º полярность выходного изменяется на обратную.
Фазочувствительный выпрямитель имеет второе название: демодулятор.
В данной схеме на вход ФЧВ поступает переменное напряжение
U1 = к 1 α
с выхода сельсина-трансформатора курса ВС3.
С выхода ФЧВ выпрямленное напряжение поступает на параллельно включенные входы:
1. ДУ – через конденсатор С1;
2. ИУ – через резистор R3.
Кроме такого различия входных цепей, устройства ДУ и ИУ имеют разные цепи об-
ратной связи, а именно:
1. в цепи обратной связи ДУ находится резистор R1;
2. в цепи обратной связи ИУ находится конденсатор С3.
Резистор R1 расположен в ПУ вне блока коррекции, его ползунок выведен на лице-
вую часть ПУ.
Этот резистор служит для регулирования выходного напряжения ДУ: при переме-
щении ползунка R1, например, вниз, сопротивление R1 увеличивается, поэтому напряже-
ние на входе ДУ уменьшается. Поэтому уменьшается выходное напряжение ДУ, т.е. сиг-
нал ДУ ослабляется. Так поступают при ухудшении погоды.
Конденсатор С3 расположен внутри блока коррекции БК. Для регулирования ско-
рости накопления сигнала ИУ служит потенциометр R3, его ползунок выведен на лицевую часть ПУ.
При перемещении ползунка R3, например, вверх напряжение, снимаемое с R3 на вход ИУ увеличивается, поэтому скорость накопления сигнала ИУ также увеличивается.
Электронные части ДУ и ИУ одинаковы и включают в себя:
1. модуляторы М1, М2;
2. усилитель У;
3. демодулятор ДМ;
4. регулируемый ограничитель напряжения РО.
Модулятор М2 в учебнике Головина 1991 г. ошибочно не показан, он должен нахо
диться между демодулятором ДМ и регулируемым ограничителем напряжения РО ( но в прилагаемой схеме на рис. 278 он есть ).
Модулятор М1 служит для преобразования постоянного напряжения в переменное
Основное свойство модулятора: при изменении полярности входного напряжения фаза выходного изменяется на 180º. Иначе говоря, модулятор выполняет функции, обрат-
ные функциям фазочувствительного выпрямителя.
В данной схеме напряжение на вход М1 поступает с выхода ФЧВ, а выходное на-
пряжение М1 подаётся на вход усилителя У.
Усилитель постоянного тока У служит для усиления переменного напряжения.
В данной схеме напряжение на его вход поступает с выхода М1, а выходное напря
жение усилителя подаётся на вход демодулятора ДМ.
Демодулятор ( фазочувствительный выпрямитель ) ДМ служит для преобразо-
вания переменного напряжения в постоянное изменяющейся полярности.
В данной схеме напряжение на его вход поступает с выхода усилителя У, а выход-
ное напряжение ДМ подаётся на вход модулятора М2.
Модулятор М2 служит для преобразования постоянного напряжения в перемен-
ное.
В данной схеме напряжение на его вход поступает с выхода демодулятора ДМ, а выходное напряжение М2 подаётся на вход регулируемого ограничителя напряжения РО.
Необходимость двойного преобразования сигнала последовательно включенными М1 – ДМ – М2 в следящих системах вызвана тем, что при суммировании сигналов управле
ния ( напряжений ) трудно добиться точного совпадения по фазе.
Поэтому на вход модулятора М1, помимо полезного сигнала, поступает составляю-
щая напряжения, сдвинутая относительно него на 90º ( т.н. квадратурная составляющая ). Для её подавления в схеме служит демодулятор ДМ.
Кроме того, наличие в схеме демодулятора ДМ с выходом на постоянном токе по-
зволяет применять простые корректирующие звенья для повышения качества следящей системы. В данной схеме, в качестве таких корректирующих звеньев служат:
1. в дифференцирующем устройстве – конденсатор С1 и резистор R1;
2. в интегрирующем устройстве – потенциометр R3 и конденсатор С3.
Регулируемый ограничитель напряжения РО служит для регулирования и ограни
чения ( по амплитуде ) переменного выходного напряжения.
В данной схеме напряжение на его вход поступает с выхода модулятора М2, а вы-
ходное напряжение РО подаётся на первичную обмотку выходного трансформатора ТV1 ( ДУ ) или ТV2 ( ИУ ).
Со вторичных обмоток ТV1 и ТV2 напряжения соответственно
U2 = к2 dα / dt и U 3 = к3 α dt
поступают в цепь суммирования сигналов.
Так же, как в схеме авторулевого АТР2-10, дифференцирующее устройство ДУ слу
жит для увеличения скорости перемещения пера руля в любом направлении – при выводе его из диаметральной плоскости ( ДП ) или при возвращении в ДП.
При этом кладки пера руля становятся более частыми и глубокими, что, с одной стороны, повышает точность удержания судна на курсе, но, с другой, перегружает руле-
вую машину.
Поэтому в штормовую погоду, когда скорость рыскания судна относительно курса возрастает, сигнал ДУ уменьшают ( «загрубляют» ).
Так же, как в схеме авторулевого АТР2-10, интегрирующее устройство ИУ служит для компенсации действия на судно внешних несимметричных сил ( ветер, волна и т.п. ).
После накопления сигнала на выходе ИУ кладки пера руля относительно диамет-
ральной плоскости судна становятся несимметричными. Возникающий на баллере ( пере руля ) разностный момент Δ М б компенсирует момент внешних сил. В результате судно станет рыскать относительно курса симметрично, т.е. так, как если бы внешних несиммет-
ричных сил не было.
Время накопления сигнала ИУ в авторулевом АТР2-10 составляет 30…40 мин, в авторулевом «АИСТ» - несколько минут.
Дата добавления: 2017-08-01; просмотров: 3272;