Силовые контроллеры
Силовые контроллеры применяют для пуска, реверса, регулирования скорости, торможения и остановки двигателей в электроприводах грузоподъёмных механизмов при мощности двигателя до 10…12 кВт и электроприводах якорно-швартовных механизмов при мощности до 20 кВт.
Различают два вида силовых контроллеров:
1.барабанные;
2.кулачковые.
Силовой барабанный контроллер
Силовой барабанный контроллер изображен на рис. 25.

Рис. 25. Силовой барабанный контроллер: 1 – медные сухарики; 2 – неподвижные контакты; 3 – стальная рейка; 4 – зажимы; 5 – маховик; 6 – вал; 7 – кулачковые шайбы; 8 – медные пластины
Контроллер имеет литой корпус, закрытый крышкой с резиновым уплотнением. С
маховиком 5 механически связан вертикальный вал 6, на котором смонтированы кулачко-
вые изоляционные шайбы 7 с привинченными к ним медными подвижными контактами 8.
Эти контакты выполнены в виде сегментов разной длины, напротив которых распо
ложены на стальной рейке 3 изолированные от нее неподвижные контакты 2. Каждый та-
кой контакт на одном конце конце имеет сухарик – привинченный медный съемный кон-
такт 1, а на другом – зажимы 4 для подключения кабелей.
Сегменты расположены по высоте барабана в определенном порядке.
Принцип действия контроллера состоит в следующем.
При повороте барабана сухарики 1 cкользят по сегментам 8, замыкаясь или размы-
каясь с ними, что приводит к необходимым переключениям в схеме управления электро-
приводом.
Барабанные контроллеры имеют следующие недостатки:
1.большой вес и габариты;
2.недостаточно плотный скользящий контакт между подвижными и неподвижны-
ми контактами.
В 60-е годы ХХ века на смену барабанным контроллерам пришли кулачковые.
Силовой кулачковый контролер
Устройство силового кулачкового контроллера показано на рис.26.
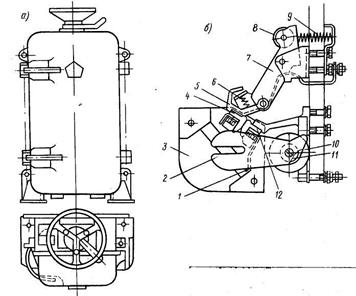
Рис. 26. Силовой кулачковый контроллер: а – общий вид; б – контактное устройст-
во;
1 – дугогасительный рог; 2 – полюсные наконечники; 3 – асбоцементная камера;
4 – подвижный контакт; 5 – суппорт; 6 – пружина контакта; 7 – рычаг; 8 – ролик;
9 – пружина; 10 – дугогасительная катушка; 11 – сердечник катушки; 12 – непод-
вижный контакт
С маховиком контроллера в виде штурвала ( рис. 26, а, нижняя проекция ) механи
чески связан вал, на котором смонтированы кулачковые шайбы с переменным профилем
( отсюда название этого типа контроллера – кулачковый ).
Против каждой кулачковой шайбы на неподвижной изоляционной панели располо-
жены контактные устройства ( рис. 26, б ).
Контактное устройство представляет собой рычаг 7, на одном конце которого на оси закреплен подпружиненный суппорт 5 с подвижным контактом 4. На втором конце рычага размещён ролик 8, находящийся во впадине шайбы. На этот конец рычага давит пружина 9, заставляя подвижный контакт 4 надавливать на неподвижный контакт 12.
При повороте маховика ролик 8 выходит из впадины шайбы и попадает на её вы-
ступ. При этом шайба надавливает на ролик, заставляя рычаг повернуться по часовой стрелке вокруг оси. Верхний край рычага сжимает пружину 9, а нижний отводит подвиж-
ный контакт 4 от неподвижного 12, контакты размыкаются.
Углы поворота вала с шайбами фиксируются в определенных положениях с помо-
щью храпового устройства. Профиль кулачковых шайб определяет программу управления электроприводом – пуск, первая скорость, вторая скорость, остановка и т.п.
Дугогасительное устройство постоянного тока состоит из последовательной искро
гасительной катушки 10, сердечника катушки 11, полюсных наконечников 2, дугогаситель
ного рога 1 и асбестоцементной камеры 3.
На переменном токе дугогашение обеспечивается установкой между кулачковыми элементами асбестоцементных перегородок, которые препятствуют перекрытию дугой рядом расположенных полюсов аппарата.
Контактные устройства цепей управления устроены и работают аналогичным обра
зом, но их контакты – не пальцевые, а мостиковые и без дугогашения.
Командоконтроллеры
Командоконтроллер – это командоаппарат ручного управления, предназначенный для частого переключения контактов в цепях управления.
В зависимости от типа, командоконтроллеры имеют до 12 рабочих положение и до 12 цепей. Каждому рабочему положению соответствует определенный рабочий режим, например, «травить», «лево», «скоростной спуск», «выбирать», «право», «тяговый подъ-
ем» и т.п. Число цепей определяется схемой управления электропривода – чем больше функций выполняет схема, тем больше число цепей.
Основным элементом контроллера является переключающее устройство ( рис. 27 ).
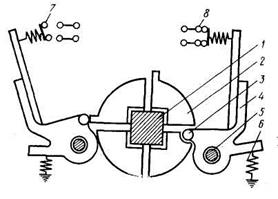
Рис. 27. Переключающее устройство командоконтроллера: 1 – вал; 2 – кулачковая шайба; 3 – ролик; 4 – пластмассовый рычаг; 5 – ось; 6 – пружина; 7 – подвижные контакты
8 – неподвижные контакты
Переключающее устройство состоит из вала квадратного сечения 1, который пово-
рачивается вручную рукояткой управления. На валу закреплены пластмассовые кулачко
вые шайбы 2 определенного профиля. Контактная система включает неподвижные контакты 8 и подвижные контакты мостикового типа 7, закрепленные на пластмассовом рычаге 4, который прижимается к кулачковой шайбе пружиной 6. Рычаг сидит на оси 5.
Поворот рукоятки управления вызывает поворот вала 1 с кулачковыми шайбами 2. Если при этом ролик 3 попадает во впадину шайбы, подвижный и неподвижный контакты замыкаются ( на рис. 27 - правая пара контактов ). Выход ролика из впадины приводит к размыканию контактов ( на рис. 27 – левая пара контактов ).
Каждое положение рукоятки аппарата фиксируется специальным храповым устрой
ством, состоящим из подпружиненного ролика и шестерни в виде звездочки. Ролик свя-
зан с корпусом аппарата, а звездочка находится на валу 1. Фиксированное положение рукоятки наступает при попадании ролика внутрь выемки на звездочке.
Командоконтроллеры могут иметь 4, 6 или 12 кулачковых элементов ( пар контак-
тов ) и от 1 до 6 положений рукоятки в одну сторону.
Командоконтроллер серии КМ-200 в сборе показан на рис. 28
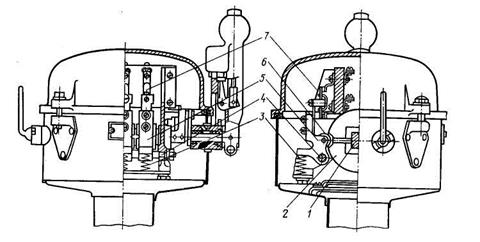
Рис. 28. Командоконтролер типа КМ-200: 1 – вал; 2 – кулачковые шайбы; 3 – пружина; 4 – ось рычага; 5 – рычаги; 6 – ролики; 7 – контакты
Положение контактов и их количество указывается в специальной таблице замыка-
ний контактов ( рис. 29 ).
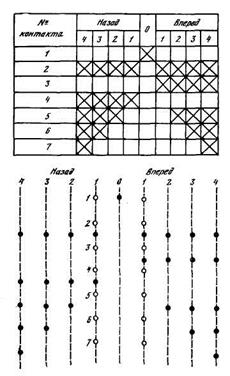
Рис. 29. Таблицы замыканий контактов: верхняя – с крестиками; нижняя – с точками
Эту таблицу можно изобразить двумя равнозначными способами:
1. в виде таблицы с крестиками;
2. в виде таблицы с точками.
Таблица с крестиками ( рис. 29, верхняя часть ) состоит из колонок и строчек.
В крайней левой колонке указаны номера подвижных контактов от 1 до 7. В осталь
ных колонках указаны номера нулевого и рабочих положений рукоятки командоконтрол-
лера. Нулевое положение обозначено цифрой «0», а рабочие положения – цифрами 1, 2, 3 и 4 в обоих направлениях - «Назад» и «Вперед».
В строчках напротив номеров контактов крестиками или пустыми клетками обо-
значается состояние контакта, а именно: если в каком-либо положении рукоятки контакт замкнут, в клетке стоит крестик, если контакт разомкнут – клетка пустая.
Например, контакт №1 замкнут только в нулевом положении ( «0» ) и разомкнут во всех рабочих ( «1», «2», «3», «4» в направлениях «Выбирать» и «Травить»).
Контакт №2 разомкнут в нулевом положении, но замкнут во всех рабочих.
Контакт №3 разомкнут в нулевом положении и в положениях 1, 2, 3 и 4 в направле
нии «Назад», но замкнут в положениях 1, 2, 3 и 4 в направлении «Вперед», и т.д.
Таблица с точками ( рис. 29, нижняя часть ) состоит из вертикальных пунктирных линий и строчек с точками. Номера вертикальных линий 0, 1, 2, 3 и 4 ( в обе стороны ) соответствуют положениях рукоятки командоконтроллера, а точки равнозначны крести-
кам - если в каком-либо положении рукоятки контакт замкнут, на вертикальной линии стоит точка, если контакт разомкнут – точки нет.
Например, контакт №1 замкнут только в нулевом положении, т.к. на вертикальной линии «0» стоит точка, и разомкнут во всех рабочих «1», «2», «3», «4» в направлениях «Выбирать» и «Травить» - на вертикальных линиях точки отсутствуют.
Дата добавления: 2017-08-01; просмотров: 486;