Кинематика поворота управляемых колес
|
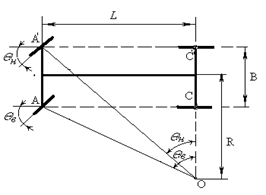
Минимальный износ шин управляемых колес будет в том случае, если перпендикуляры, опущенные от средних плоскостей управляемых колес будут пересекаться в одной точке и находиться на продолжении задней оси автомобиля. Расчетная схема для определения параметров кинематики управляемых колес приведена на рис. 9.1, где L - база автомобиля; В - колея передних колес.
. Рис.9.1 Расчетная схема для определения кинематики управляемых колес
Из D АОС запишем 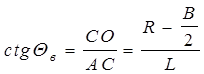 .
.
Из D А¢ОС¢ запишем 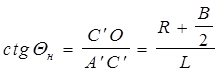 ,
,
где R – радиус траектории движения центра заднего моста автомобиля.
Разница котангенсов угол равна 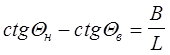 .
.  (9.1)
(9.1)
Формула (9.1) описывает кинематику идеальной рулевой трапеции при отсутствии деформаций рулевой трапеции и зазоров в шаровых пальцах поперечной тяги. Однако при повороте управляемых колес из-за деформаций рулевой трапеции и выборе зазоров в шаровых пальцах поперечной тяги наружное колесо будет повернутым на меньший угол.
Для компенсации влияния деформаций рулевой трапеции и зазоров в шаровых пальцах величину В в формуле (9.1) уменьшают, обеспечивая теоретически доворот наружного колеса на больший угол. К настоящему времени не существует единого мнения, какое значение В в формуле (9.1) принимать (см. рис.9.2). Из анализа литературных источников следует, что значение В в формуле (9.1.) рекомендуется принимать:
* В1 - расстояние между точками встречи осей шкворней с опорной поверхностью;
* В2 - Лысов М.И. рекомендует принять расстояние между центрами
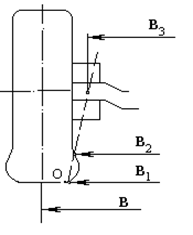
|
поворотов шаровых пальцев поперечной тяги;
· В3 - А.С. Литвинов рекомендует расстояние между осями шкворней.
Следовательно, теоретически в уравнении (9.1) В должна быть колея передних колес. Однако уменьшая значение В в уравнении (9.1), соответствующее колее управляемых колес, обеспечивается доворот наружного колеса на больший угол. Этим компенсируется деформация рулевой трапеции и зазоры в шаровых пальцах поперечной тяги.
Рис.9.2 Принимаемые значения колеи В в формуле (9.1)
Дата добавления: 2017-06-02; просмотров: 928;