и ускорения общего центра масс тела от времени в цикле ходьбы
КИНЕМАТИКА ЛОКОМОЦИЙ
Одной из основных задач биомеханики при исследовании движений человека является измерение количественных показателей механического состояния биосистемы и его изменения. Существующие методы регистрации движений (оптическое, механоэлектрическое и т.д.) позволяют определить кинематические и динамические характеристики движений спортсмена.
Кинематика движений определяет пространственную форму движений и ее изменение во времени без учета масс тела и действующих на него сил и моментов сил. Кинематика дает только внешнюю картину движения и не раскрывает причину изменения движений, и механизмы, лежащие в основе этих движений.
Кинематические характеристики тела человека и его движений – это меры положения и движения человека в пространстве и во времени: пространственные, временные и пространственно-временные.
1.1 Описание положения тела
Положение тела человека в пространстве описывается тремя характеристиками: местом, ориентацией и положением (рис. 1).
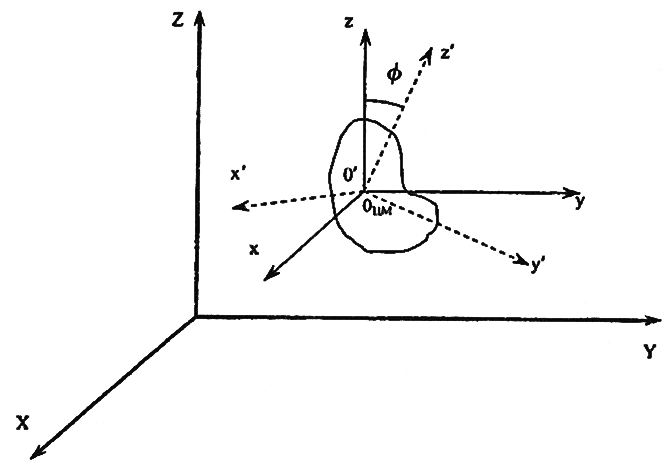
Рис. 1. Неподвижная (XYZ) и подвижная (xyz) системы координат, характеризующие место тела в пространстве
Место тела характеризует, в какой части пространства в данный момент находится человек (например, в какой части стадиона). Чтобы определить место тела, достаточно указать три координаты какой-либо точки тела в неподвижной системе координат. В качестве такой точки выбирают общий центр масс тела (ОЦМ), связывая с ним начало координат другой подвижной системы координат, оси которой ориентированы так же, как и оси неподвижной системы (рис. 1).
Ориентация тела характеризует его поворот относительно неподвижной системы координат. На рисунке 1 показано, что подобный поворот подвижной системы координат можно оценить по величине угла φ (угол между соответствующими осями x y z и x1 y1 z1). Например, при вращении подвижной системы координат в плоскости ХОУ величина угла φ1 = 0, что означает ориентацию тела вверх головой, при φ2 = 90° – горизонтально, при φ3 = 180 – вниз головой.
Поза тела характеризует взаимное расположение звеньев тела относительно друг друга. Анатомическое описание поз в анатомии весьма условно (сгибание-разгибание и т.д.), биомеханическое описание основано на применении системы независимых углов Эйлера, описывающих движение в суставах в трехмерном пространстве. Определение действительных значений углов Эйлера для сегментов тела человека при движении в трехмерном пространстве позволяет использовать аппарат теоретической механики для решения многочисленных задач биомеханического исследования.
1.2 Система координат: инерциальная, связанная с телом, поточная
При описании положения тела необходимо выбрать неподвижную систему координат. Эту неподвижную систему координат связывают с телом отсчета (условно взятым телом, от которого отсчитывается расстояние). На теле отсчета устанавливают начало и направление измерения расстояния, выбирают единицы отсчета (все это в совокупности составляет систему отсчета).
Однако любое тело отсчета нельзя считать абсолютно неподвижным и на отсчет расстояний будет влиять движение самого тела отсчета с ускорением. Условно принято считать «неподвижным», не ускоряемым телом отсчета такое, ускорение которого мало и не сказывается на отсчете данного наблюдаемого движения. Для «неподвижной» (инерциальной) системы координат справедливы формулы Ньютона (законы Ньютона).
Рассматривая подвижное тело отсчета и связанную с ним систему координат (неинерциальное тело отсчета), заметим, что ускоренное их движение приводит к существенным влияниям на изучаемые характеристики. Законы Ньютона для неинерциального тела отсчета не соблюдаются. Примером неинерциальной системы координат (связанной с телом) может служить система координат, начало отсчета которой находится в точке тазобедренного сустава перемещающегося спортсмена, относительное движение центра масс бедра будет рассматриваться в неинерциальной системе координат.
Поточная система координат неподвижно связана с основной плоскостью движения какого-либо сегмента тела человека (например, плоскостью ладони при плавании). Необходимость введения такой системы координат обусловлена решением задач динамики и определения сил аэродинамического сопротивления (рис. 2).

Рис. 2. Поточная система координат
1.3 Кинематические характеристики
Пространственный рисунок движения точки определяет ее траектория (воображаемый след движущейся точки). Длина траектории – это путь точки. Путь точки в криволинейном движении равен длине кривой линии от начального до конечного положения. Кривизна траектории (K) показывает, какова форма движения в пространстве, определяется по радиусу кривизны (r) из следующего соотношения:

 .
.
Перемещение точки измеряется по разности координат: ΔS = SK – SH (м) для поступательного движения; Δϕ = ϕK – ϕН (град) для вращательного движения, где SK, SH – конечная и начальная линейные координаты; ϕK, ϕН – конечная и начальная угловые координаты.
Временные характеристики, раскрывающие движение во времени, определяются при наличии системы отсчета времени, где за начало отсчета берется точка временной оси, отражающая начало движения.
К временным характеристикам относят:
- момент времени (ti) – точка на временной оси – промежуток времени от начала отсчета до него;
- длительность движения (Δt) – разность моментов времени от начала (t1) до конца движения (t2):
Δt = t2 – t1;
- темп движений – временная мера повторности движений (N) – количество движений в единицу времени:
 ,
,
· где единицей времени служит минута (например, критический темп в спортивной ходьбе составляет 230 шагов в минуту);
- частота движений – временная мера повторности движений (f) – количество движений в единицу времени:
 ,
,
· где единицей времени является секунда (например, максимальная частота шагов в спринтерском беге составляет 4,8 шаг/с);
- ритм движений – соотношение длительностей частей движений (фаз или периодов):
R = Δt1 : Δt2 : Δt3…
Фаза – это часть движения, на протяжении которой решается определенная двигательная задача. Начало и окончание фазы находят по граничным моментам, моментам существенного изменения движения. Граничные моменты выявляются при анализе изменения во времени динамических и энергетических характеристик основных точек тела человека (например, общего центра масс тела) и фиксируют нулевые и экстремальные (минимальные и максимальные) величины перечисленных биомеханических характеристик. Например, момент отрыва и момент постановки ноги на опору в беге, максимальная Hmax и минимальная Hmin координаты перемещения общего центра масс тела человека при ходьбе в вертикальной плоскости.
Графическое представление временной структуры движения иллюстрируется с помощью хронограммы (временной диаграммы движения) (рис. 3).
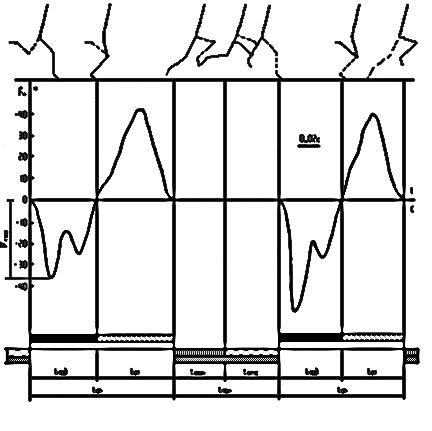
Рис. 3. Временная диаграмма движения (хронограмма)
Скорость и ускорение – это пространственно-временные характеристики движения. Скорость определяет быстроту изменения положения точки в пространстве с изменением времени:
 .
.
Скорость – это первая производная пути по времени. Графически первая производная может быть определена по тангенсу угла наклона касательной в любой точке зависимости S = S (t) – так определяется мгновенная скорость. Средняя скорость на отрезке или внутрицикловая скорость для циклических локомоций рассчитывается из соотношения перемещения точки за отрезок времени, в течение которого это изменение произошло. Максимальная скорость Vmax может быть определена графически по тангенсу угла наклона касательной (на графике перемещений S = S (t)), равному нулю – в точках экстремума tgα = 0.
Рассмотрим графики изменения вертикальных перемещений, скорости и ускорения ОЦМ тела ходока в цикле ходьбы во времени (рис. 4).
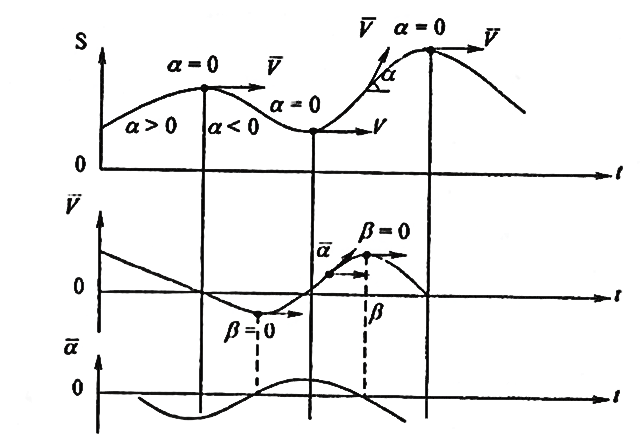
Рис. 4. Графики зависимости вертикального перемещения скорости
и ускорения общего центра масс тела от времени в цикле ходьбы
Знак скорости показывает направление движения: (+) – вверх, (–) – вниз (по графику вертикальных перемещений ОЦМ).
Знак ускорения показывает направление действия силы в ОЦМ. Если знак скорости и ускорения совпадают в какой-либо части движения (фазе), то движение имеет ускоренный характер; если знаки противоположны, т.е. направление движения и действующая сила разнонаправлены, то имеет место торможение.
Ускорение характеризует быстроту изменения вектора скорости в данный момент времени:
 .
.
Ускорение в точке может быть вычислено графически по тангенсу угла наклона кривой скорости, изменяющейся во времени:
 .
.
Для гармонической (синусоидальной) функции изменения перемещения во времени графики перемещений и ускорений находятся в противофазе (как видно из рисунка 4) – это следствие двойного дифференцирования гармонической функции.
Рассмотрим взаимосвязь величин скорости и ускорения для поступательного и вращательного движений, представленную в таблице 1.
Таблица 1
| Поступательное движение | Вращательное движение | Взаимосвязь показателей |
| Линейная координата (м) | Угловая координата (град, рад) | Радиус окружности (м) |
| Si | φi | R |
| Линейная скорость (м/с) | Угловая скорость (град/с) | – |
| 
| 
|
| Линейное ускорение | Угловое ускорение | – |
| 
| 
|
1.4 Длина и частота шагов. Связь длины и частоты шагов со скоростью
В циклических локомоциях (ходьба, бег, коньки, лыжи, гребля) скорость передвижения зависит от длины и частоты шагов.
Под длиной шага будем понимать расстояние, которое проходит спортсмен, велосипед или лодка за один цикл движения. Соотношение длины и частоты шагов в различных способах передвижения неодинаковы, но существуют общие закономерности: с увеличением частоты шагов усиливается отталкивание, растет длина шагов и вследствие этого возрастает скорость. Одновременное повышение частоты шагов и длина шага возможно до некоторого предела, после которого дальнейшее повышение одного параметра приводит к снижению другого.
Оптимальная скорость шагательных локомоций определяется оптимальным соотношением длины и частоты шагов, при которых наблюдаются минимальные затраты энергии на передвижение.
| <== предыдущая лекция | | | следующая лекция ==> |
| Ниже идёт пример как можно поступить в случае, если доступен только deb-пакет и нет его дебианизированных исходников. | | | Цели и инструменты денежно-кредитной политики |
Дата добавления: 2017-06-02; просмотров: 1535;