Model in space of parameters of a status
x (k+1) =A*x (k) + B*U (k) (2.27) y(k) =st*x(k)
digital difference recurrent equations:
X j = AЧ X j -1+ B ЧU j -D . (2.29)
3 Models for the description of non-linear systems (cm a figure 2.3)
u (t)=δ (t) y (t)=ω(t)
Ґ
y(t)=тw(t )Ч u(t -t )dt (2.30)
ҐҐ
y(t)=ттw(t1,t 2)Ч u(t -t1)Ч u(t -t 2)dt1dt 2 (2.31)
0 0
ҐҐҐ
y(t)=тттw(t1t 2t 3)Ч u(t -t1)Ч u(t -t 2)Ч u(t -t3)dt1dt 2dt 3
0 0 0
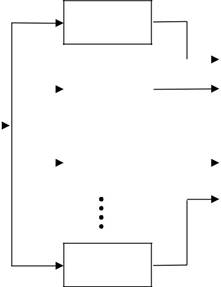
ω(τ1)
| ω(τ1,τ2) | ||||||||||||
| u(t) | Σ | y(t) | ||||||||||
| ω(τ1,τ2,τ3) | ||||||||||||

ω(τ1,...,τn)
Figure 2.3.Non-linear models of dynamics
4 Stochastic models. The impact Estimate of noise can be made if to describe process of thedescription of noise the following equation:
Ґ
Ruy (t )=тw(t)Ruu (t -t )dt (2.31)
Ruu-an autocorrelation function of an input signal (see in a lecture 6); Ruy- crosscorrelation function of an input and output signal.
Thus as the identified model it is possible to select: the linear and non-linear; determined and stochastic; with the continuous and discrete time; stationary and nonstationary; one-dimensional and multivariate; static and dynamic; with the concentrated and distributed parameters.
Properties of identification: controllability, observability, identifiability.
Controllability–system is controlled if for any timepoint in case of any statuses there issuch control of u which transfers start state of system to finite.
| detu |
u у =[В; АВ;...Аn-1 B]
where n – a system order; A – a matrix of coefficients in case of x;
B – a matrix of coefficients in case of r.
Condition of controllability of system is that у wasn't equal to zero.
Observability–the system is watched if any or all its statuses it is possible to determinedirectly or indirectly by an output vector of system.
uн =[СТ ;СТ АТ ;...СТ (Аn-1)Т ], where C–an output matrix, coefficients in case of at.At least one minor shan't be equal to zero, in this case the system is watched.
Identifiability–the system is identified if it is possible to determine its parameters bychanges of coordinates of a status of system.
ID =[V (0); AпV (0);...AпnV (0)]
where V(0) – a vector of initial conditions; Аn – a transition matrix.
An = AR + I
where AR – an augmented matrix; I – unit matrix. The system is identified if det ≠ 0.
Identification of dynamic systems.Let's say the dynamic system is described by gearfunction of the following look:
W (p)= b0 pm + b1 pm-1+...+ bm+1 p + bm a0 pn + a1 p n-1+...+ an-1 p + an
 We receive system of differential equations of first order from n - the equations
We receive system of differential equations of first order from n - the equations
dxdt = AX (t )+ BU (t ) Y (t )= CX (t )

where Y – output variables, U(t) – input variables, X – internal variables. How to receive this system?
| W (p)= | y(p) | p = | d | |||||||||||
| u(p)b) | ||||||||||||||
| I. a) | dt | d n -1 y | d n -2 y | |||||||||||
| = y , | = y | |||||||||||||
| dt n -1 | dt n -2 | |||||||||||||
| c) Changeover of a variable | ||||||||||||||
| d m -1 | d m -2 | |||||||||||||
| = u1, | = u2 | |||||||||||||
| dt m -1 | dt m -2 | |||||||||||||
d) we receive system an order n of differential equations of first order.
Дата добавления: 2017-05-18; просмотров: 589;