Понятие устойчивости систем автоматического управления.
Система находится в состоянии равновесия, если при отсутствии воздействия на систему возмущающих факторов ошибка регулирования (разность между заданным и фактическим состоянием системы) стремится к нулю. Под устойчивостью понимается способность динамической системы возвращаться в равновесное состояние после окончания действия возмущения, нарушившего это равновесие. Неустойчивая система после воздействия возмущения удаляется от равновесного состояния или начинает совершать вокруг него колебания с нарастающей амплитудой.
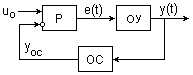 Рис. 4.1.1.Возникновение неустойчивых (расходящихся) колебаний в системе можно проследить на примере следящей системы с обратной связью (рис. 4.1.1). Допустим, что в установившемся состоянии равновесия при опорном сигнале uo на регуляторе Р выходное состояние объекта управления ОУ равно yуст. Это состояние поддерживается сигналом рассогласования еуст, который формируется в регуляторе Р по разности опорного сигнала и сигнала обратной связи уос-уст, т.е. еуст = uo-уос-уст. В первый момент включения системы в силу инерционности обратной связи уос = 0, а, следовательно, e(t) >> еуст, что вызывает нарастание выходной величины y(t), которая будет стремиться к y(t) >> ууст по крайней мере, до тех пор, пока сигнал обратной связи не начнет уменьшать значение e(t). Однако значительно возросшая величина y(t) через ОС передается на вход регулятора системы и может настолько существенно уменьшить значение e(t), что это может привести к последующему снижению величины выходного сигнала до значений y(t) << ууст, т.е. к возникновению колебательного процесса относительно равновесного состояния. При неблагоприятном соотношении параметров системы колебательный процесс может быть незатухающим и даже расходящимся. Пример такого процесса в концертной акустике хорошо известен – свист из динамиков, если коэффициент обратной связи от динамиков на микрофоны на определенных частотах становится положительным.
Рис. 4.1.1.Возникновение неустойчивых (расходящихся) колебаний в системе можно проследить на примере следящей системы с обратной связью (рис. 4.1.1). Допустим, что в установившемся состоянии равновесия при опорном сигнале uo на регуляторе Р выходное состояние объекта управления ОУ равно yуст. Это состояние поддерживается сигналом рассогласования еуст, который формируется в регуляторе Р по разности опорного сигнала и сигнала обратной связи уос-уст, т.е. еуст = uo-уос-уст. В первый момент включения системы в силу инерционности обратной связи уос = 0, а, следовательно, e(t) >> еуст, что вызывает нарастание выходной величины y(t), которая будет стремиться к y(t) >> ууст по крайней мере, до тех пор, пока сигнал обратной связи не начнет уменьшать значение e(t). Однако значительно возросшая величина y(t) через ОС передается на вход регулятора системы и может настолько существенно уменьшить значение e(t), что это может привести к последующему снижению величины выходного сигнала до значений y(t) << ууст, т.е. к возникновению колебательного процесса относительно равновесного состояния. При неблагоприятном соотношении параметров системы колебательный процесс может быть незатухающим и даже расходящимся. Пример такого процесса в концертной акустике хорошо известен – свист из динамиков, если коэффициент обратной связи от динамиков на микрофоны на определенных частотах становится положительным.
Устойчивость линейной системы определяется не характером возмущения, а структурой самой системы. Говорят, что система устойчива "в малом", если определен факт наличия устойчивости, но не определены ее границы. Система устойчива "в большом", когда определены границы устойчивости и то, что реальные отклонения не выходят за эти границы. Соответственно, и задача исследования систем на устойчивость может быть поставлена двояко:
1) устойчива ли система при заданном значении ее параметров;
2) в каких диапазонах можно изменять параметры системы, не нарушая ее устойчивости.
Вторая задача исследования имеет место при наладке и эксплуатации систем автоматического управления.
В соответствии с классическим методом решение дифференциального уравнения для системы ищется в виде:
y(t) = усв(t) + увын(t). (4.1.1)
Здесь усв(t) – свободная составляющая, общее решение однородного дифференциального уравнения с нулевой правой частью:
a0y(n) + a1y(n-1) + ... + an-1y’ + any = 0,
т.е. когда все внешние воздействия сняты, и состояние системы определяются лишь собственной структурой.
Функция увын(t) представляет собой частное решение неоднородного дифференциального уравнения, под которым понимается уравнение с ненулевой правой частью. Физически это означает, что к системе приложено внешнее воздействие u(t). Поэтому вторая составляющая общего решения называется вынужденной. Она определяет вынужденный установившийся режим работы системы при наличии на входе определенного воздействия u(t) или f(t) после окончания переходного процесса.
Дата добавления: 2016-05-11; просмотров: 845;