Рефлексирующие автоматы
Чрезвычайно заманчивым представляется рассмотреть возможности рефлексивного взаимодействия человека и машины. Этим отчасти отдается дань традиционной проблематике кибернетической литературы. Суть дела в том, что логика рефлексивных игр позволяет взглянуть на проблему общения человека и машины с новой позиции. Научные постановки
Конец страницы 54
¯ Начало страницы 55 ¯
этой проблемы в настоящее время затрагивают главным образом разработку специальных языков для составления программ обучения (математический аспект) и принципов инженерного согласования входных (выходных) устройств электронных вычислительных машин с психофизиологическими характеристиками человека (инженерно-психологический аспект). Все то, что не охватывается этими двумя аспектами, принадлежит к области фантастики, в том числе и разнообразные и многочисленные попытки осмыслить социальные последствия этого общения1. Поэтому, чтобы найти обоснованные подходы к социальному аспекту проблемы общения, необходимо прежде всего нащупать основные механизмы, посредством которых осуществляется или может осуществляться действительное общение. Предварительные исследования и проведенные специальные эксперименты позволяют предположить, что указанные механизмы целесообразно искать в сфере рефлексивного взаимодействия.
Здесь мы описываем результаты первых экспериментов, задуманных с целью демонстрации возможностей реализации рефлексивного управления человеком со стороны машины (программы). В экспериментах участвовали люди, работающие со специально сконструированным устройством. Эксперимент представляет собой игру между человеком и автоматом.
Исходные принципы игры следующие: некоторый автомат решает задачу за время t1. Человек может подключиться к нему и сознательно мешать его работе. Если при этом автомат решает задачу за время t2<t1, то будем считать, что оноптимизирует свою работу и будем его называть «устройством, оптимизирующим свою работу в результате противодействия человека». (Параметр t не обязательно должен измеряться астрономическим временем, он может быть выражен числом операций, необходимых для решения задачи).
Блок-схема устройства приведена на рис. 6. В изготовленном устройстве блок 1 (табло) представлял собой лабиринт, пять периферийных узлов которого считались выходами, и перед человеком ставилась задача не выпустить «путника», находящегося в центральном узле. «Путник» не имеет информации о том, где находятся выходы, а также не обладает памятью. Он совершает перемещения после того, как человек с помощью специального кнопочника (блок 2) дает ему указа-
___________________________________________
1 Это легко подтвердить, выбрав из огромного потока литературы наиболее серьезные работы: см., например, «Труды института радиоинженеров» (Proceedings of the IRE), т. 50. M., Изд-во иностр. лит., 1962, № 5, май (юбилейный выпуск) или последнюю книгу Н. Винера «Творец и робот» (русский перевод). М., «Прогресс», 1966, За прошедшее время положение вряд ли изменилось.
Конец страницы 55
¯ Начало страницы 56 ¯
ния. «Путник» может перемещаться из каждого данного узла в любой соседний. В каждом узле лабиринта находятся две лампочки: желтая и зеленая. Узел, в который человек направил «путника», индуцируется зеленой лампочкой, а узел, в действительности выбранный «путником», — желтой. Указание одновременно поступает в программный блок 3, который управляет движением путника. Программа построена следующим образом: «путник» может либо следовать указа-
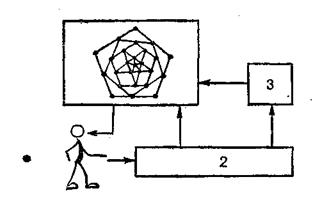
Рис. 6.
нию и перейти в узел, в котором зажглась зеленая лампочка, либо перейти в противоположный узел, согласно «зашитой» в автомат таблице противоположных узлов.
Программа была представлена последовательностью чередующихся положительных и отрицательных чисел (плюс — выполнение указания; минус — выбор узла, противоположного указанному; абсолютная величина числа — количество «послушаний» или «непослушаний», выполняемых подряд).
Испытуемые (32 студента МЭИ) инструктировались перед игрой и каждый играл с устройством две партии. Человек побеждал, если ему удавалось продержать «путника» в лабиринте более 25 ходов, в противном случае победа отдавалась «путнику» (программе). Человеку, естественно, не сообщалось, как ведет себя «путник» — желтая лампочка. Во времени испытуемые не ограничивались.
В результате данного эксперимента получены следующие распределения количеств партий по числу ходов, сделанных «путником» до выхода из лабиринта.
Конец страницы 56
¯ Начало страницы 57 ¯
Первые партии
| Число сделанных ходов | |||||||||||
| Количество партий |
Вторые партии
| Число сделанных ходов | ||||||||||||||||
| Количество партий | ||||||||||||||||
По этим данным была найдена средняя длительность блуждания «путника» в условиях противодействия. По первым партиям она оказалась равной m1=15, по вторым партиям m2—18.
Теперь необходимо сравнить этот результат со средним числом ходов, которые совершает «путник», начиная движение из центрального узла при условии, что выбор следующего узла на каждом шаге равновероятен. Такой процесс случайного блуждания (работа устройства без противодействия) может быть описан с помощью аппарата марковских цепей. Среднее число ходов «путника» при случайном блуждании оказалось равным 25. Заметим, что отношение противоположности было выбрано таким образом, чтобы исключить возможность оптимизации в результате перераспределения вероятностей, которое порождается выбором противоположных ходов в узлах, имеющих нечетное число нулей. Эти результаты могут рассматриваться как свидетельство того, что при противодействии устройство улучшает свою работу.
За счет чего достигается подобная оптимизация? Анализ программы и хода партий показал, что оптимизация работы устройства достигается благодаря тому, что программа проводит рефлексивное управление человеком.
Рассмотрим одну из партий, развернутое по ходам изображение которой приведено на рис. 7. Жирные стрелки на рисунке фиксируют перемещения «путника», пунктирные стрелки — указания человека. Слева пронумерованы уровни, на которые переходит «путник». Узлы лабиринта могут быть разделены на уровни по удаленности от центрального узла: уровень 1 — центральный узел, уровень 6 — выходы из лабиринта. Управление человеком осуществляется следующим образом.
Первые пять ходов программа, следуя знаку плюс, выпол-
Конец страницы 57
¯ Начало страницы 58 ¯
няет указания (пунктирные стрелки на рис. 7 совпадают с жирными). Человек интерпретирует эти ходы как послушание. Приняв обозначения, программа — Y, человек — X, можно считать, что Y формирует у Х убеждение в том, что его (игрока) доктрина — слушаться. Происходит превращение Духу->Д.уx. Далее, программа начинает эксплуатировать это превращение, выбирая узлы, противоположные указан-
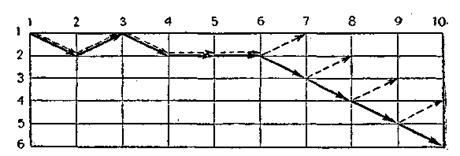
Рис. 7.
ным (следуя знаку минус). Человек, не зная программы и не произведя осознания ситуации, продолжает выводить «путника» к центру и проигрывает.
В другой партии (рис. 8) вскоре после шестого хода человек сумел проимитировать начавшееся непослушание и на-
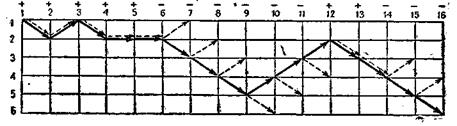
Рис. 8.
чал указывать периферийные узлы. Начиная с 12-го хода программа вновь слушается, человек для осознания этой перемены потратил два хода, на 14-м ходу программа вновь меняет свое поведение, но человек, убежденный еще в послушании «путника», не успевает изменить доктрину и выпускает «путника» из лабиринта.
Победа программы объясняется тем, что она формирует вполне определенное поведение человека, использует его, тем самым формируя новое, затем меняет свое, формирует другое поведение и т. д., в среднем обгоняя человека. В этих партиях автомату удалось провести рефлексивное управление
Конец страницы 58
¯ Начало страницы 59 ¯
и выудить у человека информацию, необходимую для более быстрого решения задачи.
Мы сознательно не употребили понятия обучения для характеристики поведения человека, так как человек непрерывно рефлексирует, и сам факт, что его учат, может быть им не осознан. Он может начать строить свое поведение исходя из того, что его учат. Думается, что понятие рефлексивного управления более точно схватывает суть дела. Программа дает только основания для принятия решения.
Устройства, оптимизирующие свою работу в результате противодействия, могут быть интерпретированы как устройства, превращающие опасения в явь. Эти устройства характеризуются тем, что предоставленные самим себе они крайне редко переходят в некоторое состояние. Однако если человек начинает совершать действия, чтобы воспрепятствовать переходу системы в это состояние, то последняя быстро переходят именно в это состояние. Было бы интересно проверить это дополнительными экспериментами.
Можно предложить, например, следующее видоизменение нашей игры между человеком и автоматом. Пусть в лабиринте типа, изображенного на табло рис. 7, блуждают п независимых «путников». Перед человеком ставится задача: не допустить в одном узле встречу одновременно k «путников» из общего числа п, вероятность которой за обозримое время крайне мала. Человек может блокировать некоторые пути, соединяющие узлы, но чтобы заблокировать новый путь, он должен открыть ранее блокированный. Есть основания предполагать, что при не очень сложных алгоритмах поведения каждого «путника» k из них встретятся в одном узле быстрее (в среднем), чем без противодействия.
Заметим, что механизм превращения опасений в явь, основанный на использовании сознательного или неосознанного противодействия, может лежать в основе некоторых приемов, используемых шаманами1.
Описанные здесь эксперименты демонстрируют пока только правомерность постановки проблемы общения человека и рефлексирующего автомата. Подобная постановка основана на объединении принципов теории автоматов, теории рефлексивных игр, логики и психологии человека. В этой связи заметим, что традиционные образы фантастической литературы: робота (в виде железного человека с усами антенн на голове-ведре) и «электронного мозга» (в виде громадного ящика с переливающимися огоньками лампочек) должны уступить место другим.
Представляется, что общение человека и машины будет
__________________________________________
1 См., например, Гарри Райт. Заколдованный круг. — «За рубежом», 1967, № 38, стр. 22.
Конец страницы 59
¯ Начало страницы 60 ¯
осуществляться в привычных для нынешних телезрителей формах. На экране, подобном экрану телевизора, появится симпатичный человек, с которым можно попросту разговаривать и которого вряд ли можно будет отличить от «живого» собеседника, находящегося на другом конце провода. Придется преодолеть немалые трудности, чтобы человеческий облик мог быть порожден функционированием технического устройства. Однако уже сейчас можно увидеть принципиальную идею такого устройства. Рефлексирующий автомат будущего должен иметь прежде всего внутренний планшет для отображения реального мира и картин этого мира, содержащихся в голове человека. Только такой сверхэкран позволит ему эффективно служить человеку, предвосхищая его потребности и желания. Пожалуй, в нем кроется и самая большая опасность, подстерегающая людей...
Нужно сказать еще о том, что формализмы рефлексивного анализа, может быть, могут служить в качестве промежуточного языка для построения моделей социального поведения, реализуемых на цифровых вычислительных машинах. Они позволят, с одной стороны, фиксировать некоторые рефлексивные процессы в социальном организме, с другой стороны, они, по-видимому, смогут послужить необходимым логическим каркасом для построения новых машинных алгоритмов, более точно отражающих природу моделируемых процессов.
Дата добавления: 2016-09-20; просмотров: 677;