Методы повышения надежности программного обеспечения
Большая трудоемкость и стоимость создания ПО СУ заставляет уделять особое внимание обеспечению его надежной работы. Высокая стоимость ПО во многом обусловлена его низкой надежностью.
Мощным средством повышения надежным ПО является автоматизация программирования, заключающейся в использовании ЭВМ для составления машинных программ. САПР обеспечивают повышение производительности и облегчения труда программистов.
Введение избыточности, включает в себя программную, информационную и временную избыточность. Программная избыточность применяет в комплексах ПО несколько вариантов программ, различающихся алгоритмами решения задачи или программной реализацией одного и того же алгоритма. Временная избыточность использует часть производительности ЭВМ для контроля исполнения программ и восстановления вычислительного процесса. Как следствии при проектировании ПО необходимо предусматривать резерв производительности ЭВМ, составляющий 5-10%. Информационная избыточность заключается в резервировании исходных и промежуточных данных, что обеспечивает как обнаружение искаженных данных, так и устранение ошибок.
Формализация описания алгоритмов и программ позволяет в существенной степени исключить, а при наличии ошибок – обеспечить их выявление и локализацию. Структурное программирование позволяет облегчить проектирование и повысить надежность сложных программных комплексов, развилось на основе процедурного и модульного программирования, а также блочно-иерархического подхода. Структурирование данных позволяет уменьшить сложность комплекса программ. При проведении корректировок в комплексах программ необходим дополнительный анализ возможных последствий внесенных изменений.
2. Для объектов наблюдения, представленных на рисунке, выбрать состав измерительных преобразователей, обеспечивающих свойство полной наблюдаемости объекта. Найти матрицы выходов.
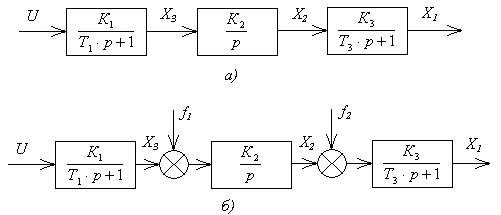
Структурные схемы объектов наблюдения
Так как объект а) линейный и невозмущенный, то для обеспечения его полной наблюдаемости достаточно измерительного преобразователя выходной величины Х1. проверку свойства полной наблюдаемости можно выполнить, определив ранг матрицы наблюдаемости:  .
.
Объект б) возмущенный, поэтому здесь необходимо как минимум два измерительных преобразователя: переменной Х1 и переменной Х2. это связано с тем, что для возмущенных линейных объектов минимальное число измерительных преобразователей, обеспечивающих полную наблюдаемость объектов, равно числу компонентов векторов возмущений.
Матрица С для объекта а):  .
.
Матрица С для объекта б):  .
.
4. Транспортно-складские системы АП. Характеристики оборудования.
Транспортные системы функционально связаны с основным и вспомогательным оборудованием ГПС и служит для перемещения заготовок, изделий, технологической оснастки.
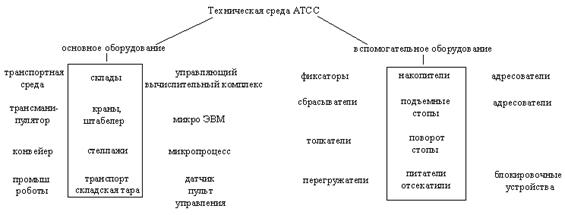
Заготовки, обрабатывающие детали и технологическое обеспечение укладываются в тару вне АТСС. Затем тара проходит контрольное устройство и поступает на загрузочный цепной контейнер к крану-штабеллеру, устанавливает ее в свободную ячейку стеллажа с нужной тарой. Кран-штабеллер забирает эту тару и устанавливает ее на приемные устройства рабочего места у станка. Далее кран-штабеллер забирает тару с отработанными деталями с приемного устройства рабочего места и устанавливает ее в свободную ячейку стеллажа (по технологическому процессу).
Складские системы: предназначены для хранения у станков или на участке необходимого количества заготовок, режущего и вспомогательного материала, инструмента, технологической оснастки, сменных узлов, агрегатов и др., компонентов материального потока.
Хранение может быть централизованным, когда имеется общий склад для всей ГПС и децентрализованным, когда детали хранятся у станков.
Автоматизация загрузочно-разгрузочных операций. Одним из главных условий применения промышленных роботов является расположение производственного оборудования, так чтобы переносимые предметы в процессе выполнения технологических операций были удобно размещены для обслуживания и их место может быть при необходимости определено по сигналам измерительных устройств (датчиков) робота.
Система управления АТСС. СУ координирует и управляет работой оборудования АТСС в режиме реального времени.
Режимы работы:
1. наладочный
2. полуавтоматический дистанционный
3. автоматический автономный
4. автоматический с управлением от ЭВМ верхнего уровня (ЭВМ ВУ)
3. На испытания, было поставлено Nо=1000 однотипных полупроводниковых приборов. Через каждые 1000 ч работы учитывалось количество отказавших приборов. Испытание продолжалось до тех пор, пока не отказали все приборы. В таблице представлена выборка результатов испытаний полупроводниковых приборов на надежность.
Таблица
| Δt, ч | n(Δt) | Δt, ч | n(Δt) |
| 0-1000 | 9000-10000 | ||
| 1000-2000 | 10000-11000 | ||
| ….. | ….. | …... | …… |
| 7000-8000 | 25000-26000 |
Используя данные таблицы, рассчитать:
а) частоту отказов для нескольких точек f(500), f(1500), f(9500), f(25500);
б) интенсивность отказов для нескольких точек λ (500), λ(1500), λ(25500);
в) вероятность безотказной работы для нескольких точек Р(1000), Р(2000),
Р(25000);
| <== предыдущая лекция | | | следующая лекция ==> |
| При попадании кислоты на кожу нужно нейтрализовать ее раствором соды, смыть водой. | | | Растворимые в воде – щелочи нерастворимые в воде |
Дата добавления: 2016-05-05; просмотров: 1902;