Пример — регулятор температуры
Рассмотрим бак, заполненный жидкостью, температура которой должна поддерживаться постоянной (рис. 1.4.). Все сигналы в этом примере - аналоговые, т. е. изменение температуры отслеживается непрерывно.
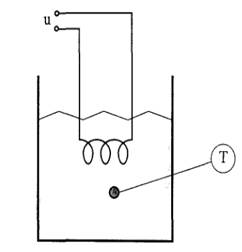 Температура измеряется датчиком, выходное напряжение которого пропорционально текущей температуре (пропорциональная зависимость существует как минимум в интересующем диапазоне температур). Текущее значение температуры сравнивается с требуемым(опорным) значением, которое хранится в памяти регулятора. Величина рассогласования рассчитывается по разности между опорным и измеренным качениями.
Температура измеряется датчиком, выходное напряжение которого пропорционально текущей температуре (пропорциональная зависимость существует как минимум в интересующем диапазоне температур). Текущее значение температуры сравнивается с требуемым(опорным) значением, которое хранится в памяти регулятора. Величина рассогласования рассчитывается по разности между опорным и измеренным качениями.
 В зависимости от исполнительного механизма - устройства, непосредственно влияющего на процесс, - меняется вид управляющего сигнала, подающегося на его вход. Температуру можно регулировать с помощью нагревателя, периодически включаемого на заданный интервал времени, или использовать теплообменник, соединенный с трубопроводами пара и холодной воды. В первом случае управляющим действием является момент включения нагревателя; во втором - регулирование осуществляется за счет открытия или закрытия клапанов трубопроводов пара и охлаждающей жидкости.
В зависимости от исполнительного механизма - устройства, непосредственно влияющего на процесс, - меняется вид управляющего сигнала, подающегося на его вход. Температуру можно регулировать с помощью нагревателя, периодически включаемого на заданный интервал времени, или использовать теплообменник, соединенный с трубопроводами пара и холодной воды. В первом случае управляющим действием является момент включения нагревателя; во втором - регулирование осуществляется за счет открытия или закрытия клапанов трубопроводов пара и охлаждающей жидкости.
Если теплоемкость бака велика, то постоянная времени имеет относительно большое значение. Наоборот, если объем бака небольшой, а нагреватель мощный, то постоянная времени процесса мала и система управления должна достаточно часто включать или отключать нагреватель. Таким образом, при проектировании системы управления должны быть учтены основные динамические характеристики процесса.
Система может быть многоуровневой, т.е. состоять например, из локальных контроллеров и центральной управляющей ЭВМ.
Для многоуровневых систем управления существуют два основных подхода к реализации обратной связи:
· прямое цифровое управление(ПЦУ, Direct Digital Control - DDC) центральная ЭВМ рассчитывает управляющие сигналы для исполнительных устройств. Все данные наблюдения передаются в полном объеме от датчиков к центру управления, а управляющие сигналы - обратно к исполнительным устройствам.
· распределенное прямое цифровое управления(Distributed Direct Digital Control - DDDC) вычислительная система имеет распределенную архитектуру, а цифровые регуляторы реализованы на основе локальных процессоров, т. е. расположены вблизи технического процесса. ЭВМ верхних уровней управления рассчитывают опорные значения, а локальные процессоры ответственны главным образом за непосредственное управление техническим процессом, т. е. выработку управляющих сигналов для исполнительных механизмов на основе данных локального мониторинга. Эти локальные ЭВМ включают в себя цифровые контуры управления.
Различие между прямым цифровым управлением и распределенным прямым цифровым управлением заключается в том, что в первом случае, даже при наличии нескольких ЭВМ, они занимаются только передачей информации и не принимают решений (кроме центрального ЭВМ) об управляющих действиях. Напротив, в распределенной структуре ЭВМ на уровнях процесса, участка и общего управления могут действовать более или менее автономно и не зависят от центральной ЭВМ. Как уже указывалось, это различие влияет и на надежность сложной системы. При отказе центральной ЭВМ, управляющая система типа ПЦУ останавливается, а распределенная система, даже при отказе одного или нескольких элементов, хотя и утратит часть функций, но будет продолжать работу.
Более простая и архаичная форма автоматизированного управления - это так называемое управление опорными значениями (setpoint control). ЭВМ рассчитывает опорные значения, которые затем передаются обычным аналоговым регуляторам. В этом случае ЭВМ применяется только для вычислений, а не для измерений или генерации управляющих воздействий.
Дата добавления: 2016-05-05; просмотров: 1077;