Аналоговые измерительные устройства
Выходной сигнал датчика подается на вход обрабатывающего устройства, например на входную клемму контроллера. для корректной передачи сигнала между ними должны быть согласованы диапазоны и уровни сигналов, входные и выходные сопротивления.
Большинство датчиков, применяемых в системах управления, генерируют аналоговый сигнал. Как правило, при управлении измеряются следующие физические величины:
o электрические и магнитные характеристики;
o параметры движения;
o сила, момент и давление;
o температура;
o уровень заполнения емкости;
o расход;
o плотность, вязкость и консистенция;
o концентрация (газа, жидкости, растворенных и взвешенных веществ);
o химическая и биохимическая активность.
Ниже представлен краткий обзор аналоговых датчиков, обычно используемых в системах управления.
Датчики движения
Датчики движения(motion sensors) измеряют четыре кинематические величины:
o перемещение (изменение положения, расстояния, степени приближения, размера)
o скорость (включая угловую);
o ускорение;
o удар.
Каждая из этих величин является производной по времени от предшествующей. Теоретически можно измерить только одну из них и затем получить остальные дифференцированием или интегрированием. На практике, однако, такой подход неприемлем из-за природы сигнала (постоянный, переходный и т. д.), частотного спектра шумов и возможностей средств обработки данных.
Контроль параметров движения обязателен для приложений, в которых используется механическое оборудование - сервосистемы, роботы, электроприводы или другие манипуляторы. Измерение перемещений применяется при управлении положением клапанов. Толщина пластин в прокатном стане постоянно контролируется системой управления калибровкой. Датчики деформаций - это устройства, которые измеряют механическое напряжение, давление и силу, но могут применяться и для измерения перемещений. В системах мониторинга состояния и предупреждения отказов механического оборудования широко используются акселерометры.
Для измерения параметров движения применяются следующие типы устройств:
o потенциометры для измерения перемещений; они работают как переменные резисторы;
o датчики на основе принципа электромагнитной индукции, например дифференциальные трансформаторы, резольверы, синхротранс-форматоры (сельсины)
o емкостные датчики для измерения малых перемещений, вращений и уровней жидкости;
o пьезоэлектрические датчики для измерения давления, напряжения, ускорения, скорости, силы и момента (пьезоэлектрический материал деформируется под действием приложенной разности потенциалов или вырабатывает разность потенциалов при механическом воздействии);
o лазерные датчики для точного измерения малых перемещений;
o ультразвуковые датчики для измерения расстояний в медицинских приборах, системах автофокусировки фото- и телекамер, измерения уровня и скорости.
Пример - Резольвер
Резольверы применяются в приложениях, где требуется очень точное измерение угловых перемещений и скорости, например в сервосистемах и роботах. Выходной сигнал резольвера - это мера углового перемещения, дифференцирование этого сигнала дает угловую скорость. Резольвер работает на принципе измерения взаимоиндукции между двумя обмотками (рис. 2.5).Ротор резольвера соединен с вращающимся объектом. На первичную обмотку ротора подается переменное напряжение vref. Статор состоит из двух обмоток, развернутых на 90° друг относительно друга. Напряжение на этих обмотках
соответственно, где θ - угловое положение ротора.
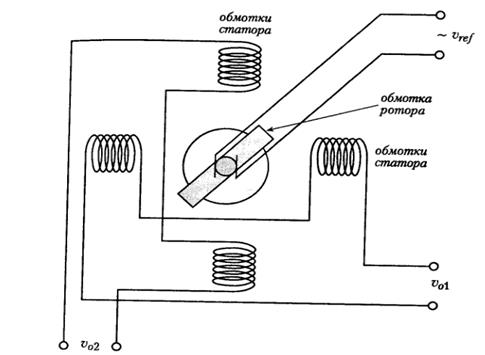
Рис. 2.5. Принцип работы резольвера
Можно сказать, что выходные напряжения vо1 и vо2 представляют собой напряжение vref промодулированное величиной угла θ. Используя одно из выходных напряжений, можно однозначно измерить углы лишь в диапазоне 0-90°, оба сигнала позволяют однозначно измерять углы от 0е до 360°.
Выход резольвера есть тригонометрическая функция угла. Эта нелинейность, однако, не всегда является недостатком. Например, при управлении вращающими моментами в роботах требуются именно тригонометрические функции углов поворота. Поэтому выходной сигнал резольвера можно непосредственно использовать для управления без дополнительного преобразования в реальном времени, которое увеличило бы загрузку управляющего контроллера.
Проблемы при работе резольвера могут возникать только из-за щеток ротора (износ, дополнительные шумы и механические нагрузки). Резольверы поставляются в виде полнофункциональных автономных устройств.
Пример - Тахометр
Тахометр представляет собой генератор постоянного тока с постоянными магнитами, применяемый для измерения угловой скорости. Принцип его действия иллюстрируется рис. 2.6.
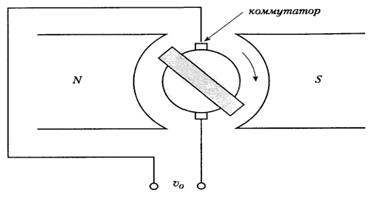
Рис. 2.6. Принцип работы тахометра постоянного тока
Магниты создают постоянное однородное магнитное поле. Движение проводника в поле индуцирует напряжение, пропорциональное скорости его вращения. Ротор непосредственно соединен с объектом, скорость вращения которого измеряется. Выходное напряжение, генерируемое в процессе вращения, снимается коллектором, который состоит из пары угольных щеток с низким сопротивлением. Тахометр обычно создает очень маленькую дополнительную механическую нагрузку для больших валов, на которые он устанавливается. Анализируя динамику тахометра, можно утверждать, что его частотный диапазон обычно значительно шире, чем у механического двигателя при его нормальной нагрузке. Поэтому индуктивность и другие электромагнитные параметры тахометра обычно не влияют на результаты измерения.
Дата добавления: 2016-05-05; просмотров: 1753;