АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ.
Регуляторы можно строить на основе как аналоговой, так и цифровой техники. Соответственно, для анализа и проектирования аналогового и цифрового регулятора требуются разные математические методы. Хотя цифровая технология позволяет хорошо моделировать работу аналоговой системы управления, т. е. реализовать аналоговые понятия цифровыми средствами, ее возможности гораздо шире. Например можно построить нелинейные и самонастраивающиеся регуляторы, которые нельзя создать на основе только аналоговых средств. Главная проблема цифрового управления - найти соответствующую структуру регулятора и его параметры. После определения этих параметров реализация алгоритмов управления обычно представляет собой простую задачу. Помимо этого, каждый регулятор должен включать средства защиты, предотвращающие опасное развитие процесса под действием регулятора в нештатных ситуациях.
Многие производственные процессы характеризуются несколькими входными и выходными параметрами. В большинстве случаев внутренние связи и взаимодействие соответствующих сигналов не имеют принципиального значения, и процессом можно управлять с помощью набора простых регуляторов, при этом каждый контур управления обрабатывает одну пару вход/выход. Такой подход используется в системах прямого цифрового управления.
Типовая структурная схема регулятора
Автоматический регулятор (рис. 5.1.) состоит из: ЗУ - задающего устройства, СУ - сравнивающего устройства, УПУ - усилительно-преобразующего устройства, БН - блока настроек.
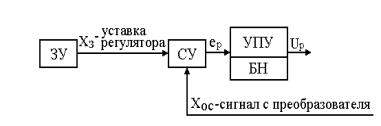
Рис. 5.1. Типовая структурная схема автоматического регулятора.
Задающее устройство должно вырабатывать высоко стабильный сигнал задания (уставку регулятора), либо изменять его по определенной программе. Сравнивающее устройство позволяет сопоставлять сигнал задания с сигналом обратной связи и, тем самым, сформировать величину ошибки регулирования  Усилительно-преобразующее устройство состоит из блока формирования алгоритма регулирования, блока настройки параметров этого алгоритма и усилителя мощности. В промышленных регуляторах имеется также переключатель "Прямой - Обратный", с помощью которого может инвертироваться величина приращения сигнала управления. Выбор положения этого переключателя осуществляется таким образом, чтобы обеспечить отрицательную обратную связь в системе.
Усилительно-преобразующее устройство состоит из блока формирования алгоритма регулирования, блока настройки параметров этого алгоритма и усилителя мощности. В промышленных регуляторах имеется также переключатель "Прямой - Обратный", с помощью которого может инвертироваться величина приращения сигнала управления. Выбор положения этого переключателя осуществляется таким образом, чтобы обеспечить отрицательную обратную связь в системе.
Дата добавления: 2016-05-05; просмотров: 1495;