Силы и моменты действующие на судно.
Все силы, действующие на судно, по принятой в настоящее время классификации разделяются на три группы: движущие, внешние и реактивные.
К движущим относят силы, создаваемые средствами управления с целью придания судну требуемого линейного и углового движения. К таким силам относятся упор гребного винта, боковая сила руля, силы, создаваемые САУ, и т. п.
К внешним относятся силы давления ветра, волнения моря, течения. Эти силы, обусловленные внешними источниками энергии, в большинстве случаев создают помехи при маневрировании.
К реактивным относятся силы и моменты, возникающие в результате движения судна под действием движущих и внешних сил. Реактивные силы зависят от линейных и угловых скоростей.
По своей природе реактивные силы и моменты разделяются на инерционные и неинерционные.
Инерционные силы и моменты обусловлены инертностью судна и присоединенных масс жидкости. Эти силы возникают только при наличии ускорений — линейного, углового, центростремительного.
Инерционная сила всегда направлена в сторону, противоположную ускорению. При равномерном прямолинейном движении судна инерционные силы не возникают.
Неинерционные силы и их моменты обусловлены вязкостью забортной воды, следовательно, являются гидродинамическими силами и моментами. При рассмотрении задач управляемости обычно, как уже отмечалось, используется связанная с судном подвижная система координат с началом в ц. т.(тG) Положительное направление осей: X — в нос; Y— в сторону правого борта; Z — вниз. Положительный отсчет углов принимается по часовой стрелке, однако с оговорками в отношении угла перекладки, угла дрейфа и курсового угла ветра.
За положительное направление перекладки руля принимают перекладку, вызывающую циркуляцию по часовой стрелке, т. е. перекладку на правый борт (перо руля при этом разворачивается против часовой стрелки).
За положительный угол дрейфа принимается такой, при котором поток воды набегает со стороны левого борта и, следовательно, создает положительную поперечную гидродинамическую силу на корпусе. Такой угол дрейфа возникает на правой циркуляции судна.
Общий случай движения судна описывается системой из трех дифференциальных уравнений движения: двух уравнений сил — по продольной X и поперечной Y осям и уравнения моментов вокруг вертикальной оси Z.
Эта система в несколько упрощенном варианте имеет вид:


где m – масса судна
λ11 – присоединенные массы при движении по оси X;
λ22 - присоединенные массы при движении по оси Y;
VX – проекция скорости судна на ось X;
VY - проекция скорости судна на ось Y;
ω - угловая скорость судна;
J - момент инерции судна относительно оси Z;
RX – продольная гидродинамическая сила на корпусе;
RY – поперечная гидродинамическая сила на корпусе;
PE – полезная сила упора винта;
PPX – продольная сила давления воды на руль;
PPY – поперечная сила руля;
AX – продольная аэродинамическая сила;
AY – поперечная аэродинамическая сила;
MR – момент гидродинамической силы на корпусе;
MA – момент аэродинамической силы;
MP – момент поперечной силы руля.
Первое уравнение системы характеризует движение судна по оси «X» при разгоне и торможении, поэтому его решение позволяют оценивать инерционно-тормозные характеристики судна. Второе уравнение описывает закономерности поперечного смещения судна. Третье уравнение, характеризующее угловое движение, используется при оценки управляемости судов. Из данной системы видно, что при равномерном и прямолинейном движении судна, левые части уравнений будут равны нулю, а поперечного движения не будет. Исходя из этого система уравнений примет вид:
Pe = RX + AX + PPX
 G
G






 VX
VX
PPX Pe AX RX
Рис.6.5. Силы, действующие на судно при прямолинейном движении.
6.4 Силы возникающие от работы винта.
Гидромеханическое взаимодействие системы корпус — винт — руль очень сложно. Движитель, работающий вблизи корпуса судна, существенно изменяет его поле скоростей, что приводит к изменению гидродинамических сил, действующих на корпус. В свою очередь, поток воды, набегающий на винт, получает возмущения от корпуса перемещающегося корабля. Существенное влияние винт так же оказывает на расположенный позади него руль. В результате взаимодействия системы корпус — винт — руль . возникает целый ряд боковых сил, которые необходимо постоянно учитывать и рационально использовать при управлении маневрами судна.
Сила попутного потока.
Движущийся в воде корпус вызывает попутный поток, направленный в сторону движения судна. Причины его появления — трение пограничных слоев воды о корпус судна и стремление масс воды заполнить объем, вытесненный корпусом. Между скоростью попутного потока в месте расположения винта Vp искоростью хода судна V существует соотношение Vp = V (1—ω), где ω — коэффициент попутного потока. Его значения для различных судов могут изменяться от 0,10 до 1,00. Таким образом, влияние корпуса на винт сводится к уменьшению скорости обтекания винта.
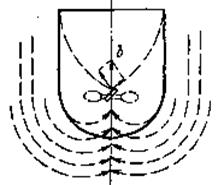
рис.6.6. Сила попутного потока
Экспериментально установлено, что в верхней половине диска винта скорость попутного потока больше, чем в нижней. Неравномерность поля скоростей попутного потока в диске винта за один оборот вызывает изменение угла атаки и соответственно сил упора и момента на лопастях, проходящих верхнее и нижнее положения. Так, лопасть, находящаяся в верхнем положении, будет иметь больший угол атаки и соответственно большее сопротивление вращению, чем лопасть, находящаяся в нижнем положении. В результате возникает боковая сила, которая на переднем установившемся ходу (винт правого вращения) будет уклонять корму судна влево.
Сила попутного потока bпроявляет себя в наибольшей степени на переднем установившемся ходу, вызывая уклонение кормы судна в сторону, обратную вращению винта.
Сила реакции.
Лопасти гребного винта, проходящие верхнее положение, находятся значительно ближе к поверхности воды, чем лопасти,проходящие нижнее положение. В результате этогопроисходит засасывание воздуха в верхние слои воды,чтозначительно изменяет силовые характеристики лопасти(упор и момент).
Влияние близости поверхности воды наиболее существенно проявляется при малом заглублении винта (у транспортныхсудов, следующих в балласте, лопасть в верхнем -положении вообще выходит из воды), в период неустановившегося движения (дача хода со «стопа»), при реверсах. Разность упора и момента на верхней и нижней лопастяx, приводит к образованию боковой силы реакции D. На установившемся ходу и с увеличением заглубления винта действие силы реакции резко уменьшается.
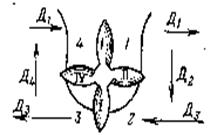
Рис.6.6. Действие силы реакции D.
В 1-м секторе лопасть, переходя из положения 1 в положение 2, встречает сопротивление воды, сила реакциикоторой будет направлена вначале справаналево (сила Д1,а затем снизу вверх (сила Д2); последняя на диаметральнуюплоскость судна не влияет, но дает вибрацию кормы.
Во 2-м секторе лопасть, переходяиз положения 2 в положение 3, встречает сопротивление воды, сила реакции которой направлена сначала снизу вверх (сила Д2), а затем лопастьбудет преодолевать силу реакции достаточно плотных слоев воды (сила Д3), направленную слева направо и значительно большую, чем сила Д1. Следовательно, корма судна будет отклоняться вправо, а нос — влево.
В 3-м секторе лопасть, переходя из положения 3 в положение 4, встречает сопротивление воды, сила реакции которой будет направлена вначале слева направо (сила Д3), а затем лопасть будет преодолевать силу реакции Д4, направленную сверху вниз. На диаметральную плоскость судна эта сила не влияет, но дает вибрацию кормы.
В 4-м секторе лопасть, переходя из положения 4в положение 1, встречает сопротивление воды, сила реакции которой направлена вначале сверху вниз (сила Д4), а затем лопасть будет преодолевать силу реакции менее плотных слоев воды (сила Д1), направленную справа налево, значительно меньшую, чем сила Д3. Следовательно, корма судна будет отклоняться вправо, а нос — влево.
Сила реакции D проявляется в наибольшей степени в период неустановившегося движения, вызывая уклонение кормы в сторону вращения винта.
Сила набрасываемой струи.
Гребной винт при вращении закручивает прилегающие к лопастям массы воды и отбрасывает их, образуя мощный спиральный поток. При движении судна вперед этот поток воздействует на расположенный позади винта руль.При движении задним ходом поток воздействует на кормовой подзор судна. Образованный винтом спиральный поток можно представить в осевой (аксиальной) и касательной (тангенциальной) составляющих. Аксиальная составляющая, воздействуя на расположенный за винтом руль, значительно повышает его эффективность и никаких боковых сил не вызывает. При движении судна задним ходом аксиальная составляющая, воздействуя на симметричные обводы кормы, также никаких боковых сил не вызывает.
Тангенциальная составляющая на переднем ходу воздействует на перо руля в левой верхней и правой нижней половинах.
Из-за несимметричности распределения попутного потока по осадке судна, а следовательно, и вызванных окружных скоростей в потоке, натекающем на руль, воздействие тангенциальной составляющей на правую нижнюю половину руля будет больше, чем на левую верхнюю. В результате возникает боковая сила набрасываемой струи С.
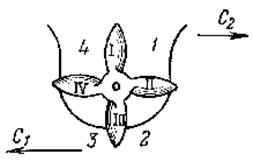
Рис.6.7. Действие силы С
В 1-м секторе лопасть, переходя из положения 1 в положение 2, отбрасывает слои воды в сторону от судна, и никакой силы набрасывания струи не образуется.
Во 2-м секторе лопасть, переходя из положения 2 в положение 3, набрасывает слои воды на нижнюю поверхность руля, где плотность воды значительно больше.. Руль должен был бы иметь стремление отклониться влево, но поскольку он установлен в диаметральной плоскости судна, сила набрасываемой струи устремляется на всю корму судна и отводит корму судна влево, а следовательно, нос идет вправо. Обозначим эту силу через С1.
В 3-м секторе лопасть, переходя из положения 3 в положение 4, будет отбрасывать слои воды от судна, следовательно, никакой силы набрасывания струи не будет.
В 4-м секторе лопасть, переходя из положения 4в положение 1, набрасывает снова слои воды, но уже с другой стороны, нежели во 2-м секторе, и на верхнюю часть руля. Обозначим эту силу набрасывания струи С2. Действие этой силы будет меньше, чем действие силы набрасывания струи С1во 2-м секторе, вследствие меньшей плотности воды. Отсюда следует вывод: винт правого вращения на установившемся переднем ходу, действуя на руль, отклоняет корму судна влево, а нос — вправо
Дата добавления: 2016-05-16; просмотров: 1465;