Геометрический смысл ЗЛП с двумя переменными
Лекция 2
Геометрический метод решения ЗЛП с двумя переменными.
Геометрический смысл ЗЛП с двумя переменными
Рассмотрим ЗЛП в стандартной форме при условии, что ее система ограничений содержит только две переменные. В этом случае задача имеет простой геометрический смысл, и, используя геометрическую интерпретацию, легко найти ее решение.
Система ограничений задачи с двумя переменными в стандартной форме имеет вид:
(1) 
(2) 
Среди неотрицательных решений системы (1) требуется найти такое решение  , при котором линейная функция
, при котором линейная функция
(3)  принимает наименьшее значение.
принимает наименьшее значение.
Обсуждение этой задачи начнем с рассмотрения одного линейного неравенства  . Выберем на плоскости систему координат
. Выберем на плоскости систему координат  . Естественно, встает вопрос: какую область на плоскости определяет это неравенство? Ответ на этот вопрос известен из школьного
. Естественно, встает вопрос: какую область на плоскости определяет это неравенство? Ответ на этот вопрос известен из школьного
курса математики. Следует рассмотреть прямую l, определяемую уравнением  . Эта прямая разбивает всю плоскость на две полуплоскости (на рис. 3.1 изображен случай
. Эта прямая разбивает всю плоскость на две полуплоскости (на рис. 3.1 изображен случай  ). В одной из них выполняется неравенство
). В одной из них выполняется неравенство  , а в другой
, а в другой  . Саму прямую l мы считаем принадлежащей каждой из указанных
. Саму прямую l мы считаем принадлежащей каждой из указанных
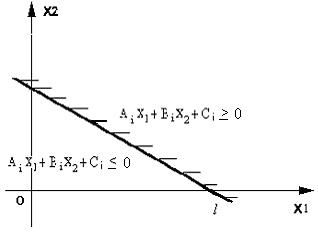
Рис. 3. 1
полуплоскостей. Практически, для того чтобы узнать, какая из двух полуплоскостей соответствует неравенству  , поступают так: если
, поступают так: если  , то приводят неравенство к одному из видов
, то приводят неравенство к одному из видов  или
или  . В первом случае искомая полуплоскость лежит выше прямой l, во втором – ниже прямой l. Если же
. В первом случае искомая полуплоскость лежит выше прямой l, во втором – ниже прямой l. Если же  , то неравенство приводится к одному из видов
, то неравенство приводится к одному из видов  или
или  , соответствующая полуплоскость лежит слева или справа от прямой
, соответствующая полуплоскость лежит слева или справа от прямой  .
.
Таким образом, первое неравенство системы (1) определяет некоторую полуплоскость  , а второе – полуплоскость
, а второе – полуплоскость  и т.д. Если какая-нибудь пара чисел
и т.д. Если какая-нибудь пара чисел  удовлетворяет каждому неравенству системы (1), то точка
удовлетворяет каждому неравенству системы (1), то точка  принадлежит пересечению полуплоскостей
принадлежит пересечению полуплоскостей  , которое является некоторой многоугольной областью М. Нетрудно заметить, что эта область может быть замкнутой или незамкнутой неограниченной.
, которое является некоторой многоугольной областью М. Нетрудно заметить, что эта область может быть замкнутой или незамкнутой неограниченной.
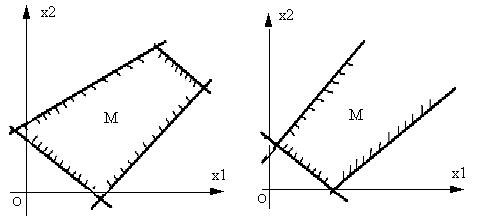
Рис. 3. 2 Рис. 3. 3
Штрихи на рис. 3.2 и рис. 3.3 указывают, с какой стороны от прямой лежит полуплоскость, соответствующая заданному неравенству.
Область М называют областью решений системы (1). Так как граница области М состоит из отрезков прямых, то М является многоугольной областью; если область М ограничена, то ее называют многоугольником решений системы (1). Может случиться, что  , в этом случае система (1) несовместна. Заметим, что если добавить условие (2), то область решений вся будет находиться в первой четверти.
, в этом случае система (1) несовместна. Заметим, что если добавить условие (2), то область решений вся будет находиться в первой четверти.
Область решений М обладает очень важным свойством: она является выпуклой. Фигура называется выпуклой, если она вместе с любыми двумя своими точками A и B содержит и весь отрезок АВ.
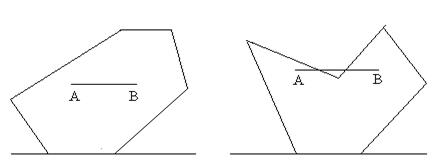
Рис. 3. 4 Рис. 3. 5
Выпуклая область Невыпуклая область
Из геометрии известно, что точка С=  принадлежит отрезку AB, где A=
принадлежит отрезку AB, где A=  , B=
, B=  , тогда и только тогда, когда выполняются равенства (4):
, тогда и только тогда, когда выполняются равенства (4):
(4)  ,
,  .
.
Условие (4) можно записать короче в виде (5):
(5) С =  A +
A +  B, .
B, .
Если =0, то = 1 и C = B, если = 1, то = 0 и C = A.
Известно, что полуплоскость – выпуклая фигура, пересечение выпуклых фигур – также выпуклая фигура, поэтому область решений системы неравенств (1) и (2) является выпуклой.
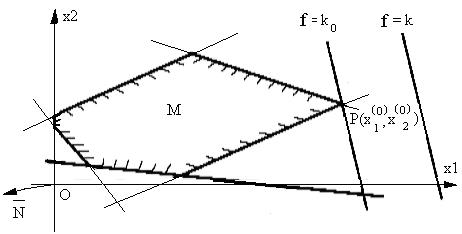
Рис. 3. 6
Итак, область решений системы неравенств (1) и (2) есть выпуклая многоугольная область, которая получается в результате пересечения всех полуплоскостей, соответствующих неравенствам системы (1), с первой четвертью.
Изобразим теперь на плоскости множество точек, в которых функция  принимает одно и то же значение
принимает одно и то же значение  :
:  . Ясно, что это множество точек прямой. Эту прямую называют прямой (линией) уровня функции
. Ясно, что это множество точек прямой. Эту прямую называют прямой (линией) уровня функции  , отвечающей значению
, отвечающей значению  . Вектор
. Вектор  перпендикулярен прямой
перпендикулярен прямой  .
.
Множество точек плоскости, в которых функция  принимает значение
принимает значение  , где
, где  , представляет собой другую прямую уровня
, представляет собой другую прямую уровня  , которая параллельна прямой
, которая параллельна прямой  . Изменяя
. Изменяя  от
от  до
до  , мы будем перемещать прямую уровня параллельно самой себе, «зачерчивая» всю плоскость. Из геометрии известно, что вектор
, мы будем перемещать прямую уровня параллельно самой себе, «зачерчивая» всю плоскость. Из геометрии известно, что вектор  (градиент функции ) показывает направление смещения линии уровня
(градиент функции ) показывает направление смещения линии уровня  при изменении
при изменении  от до .
от до .
При этом смещении наступит такой момент, когда при некотором значении  линия уровня коснется области М хотя бы в одной точке. Пусть
линия уровня коснется области М хотя бы в одной точке. Пусть  будет одной из первых точек прикосновения линии уровня с областью М. Тогда пара чисел
будет одной из первых точек прикосновения линии уровня с областью М. Тогда пара чисел  и будет оптимальным решением ЗЛП (1), (2), (3), и min
и будет оптимальным решением ЗЛП (1), (2), (3), и min  .
.
Если область М – неограниченная, то может оказаться, что первой точки прикосновения линии уровня функции  , соответствующей наименьшему уровню
, соответствующей наименьшему уровню  , с областью М нет. В этом случае задача не имеет оптимального решения (min
, с областью М нет. В этом случае задача не имеет оптимального решения (min  ).
).
Прямая, которая имеет с областью М по крайней мере одну общую точку и вся область М лежит по одну сторону от этой прямой, называется опорной по отношению к этой области.
Исходная задача на геометрическом языке теперь может быть сформулирована так: среди прямых уровня функции  найти такую опорную прямую по отношению к области М, чтобы вся область лежала со стороны больших значений функции . Любая из общих точек этой прямой с областью М даст оптимальное решение задачи. Если область М ограниченная (выпуклый многоугольник), то среди линий уровня две являются опорными для М; из этих двух нужно выбрать ту, которая отвечает меньшему значению .
найти такую опорную прямую по отношению к области М, чтобы вся область лежала со стороны больших значений функции . Любая из общих точек этой прямой с областью М даст оптимальное решение задачи. Если область М ограниченная (выпуклый многоугольник), то среди линий уровня две являются опорными для М; из этих двух нужно выбрать ту, которая отвечает меньшему значению .
Дата добавления: 2016-04-14; просмотров: 1350;