Примеры типовых схем реализации логических функций
Посредством релейно-контактных элементов
| Назначение, функция | Принципиальная схема |
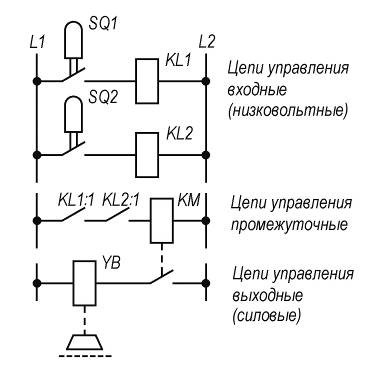
Включение электромагнитного тормоза YB при одновременном включении датчика-реле положения SQ1 И датчика-реле положения SQ2:
 FN = a;
FM = b;
FR = n·m;
FX = r.
Обозначения элементов:
A => SQ1;
B => SQ2;
N => KL1;
M => KL2;
R => KM;
X => YB. FN = a;
FM = b;
FR = n·m;
FX = r.
Обозначения элементов:
A => SQ1;
B => SQ2;
N => KL1;
M => KL2;
R => KM;
X => YB.
| 
|
Окончание таблицы п17.3.1
| Назначение, функция | Принципиальная схема |
|
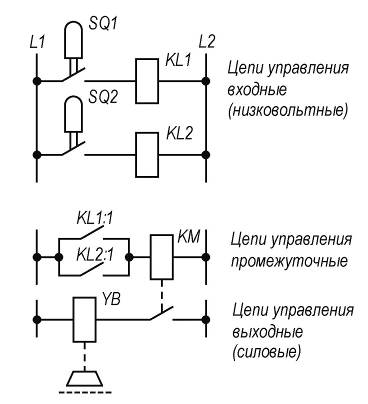
Включение электромагнитного тормоза YB при включении датчика-реле положения SQ1 ИЛИ при включении датчика-реле положения SQ2:
FN = a;
FM = b;
FR = n+m;
FX = r.
Обозначения элементов:
A => SQ1;
B => SQ2;
N => KL1;
M => KL2;
R => KM;
X => YB.
| 
|
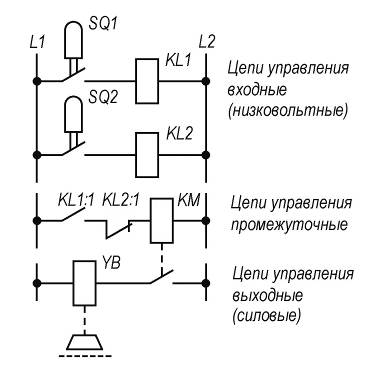
Включение электромагнитного тормоза YB при включении датчика-реле положения SQ1 И НЕвключении датчика-реле положения SQ2:
FN = a;
FM = b;
 FR = n·m;
FX = r.
Обозначения элементов:
A => SQ1;
B => SQ2;
N => KL1;
M => KL2;
R => KM;
X => YB. FR = n·m;
FX = r.
Обозначения элементов:
A => SQ1;
B => SQ2;
N => KL1;
M => KL2;
R => KM;
X => YB.
| 
|
Схема управления электромагнитом тормоза, реализующая заданную переключательную функцию, представлена на рисунке п17.3.1.
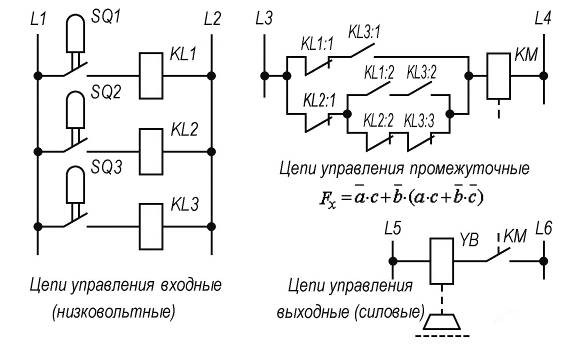
Рис. п17.3.1. Принципиальная схема релейно-контактной системы
включения электромагнитного тормоза
Пример № 17.4
Представить минимизированную переключательную функцию в текстовой форме, используя ключевые слова логических отношений: "если ... , то ...", "и", "или", "не" и наименования реальных элементов системы торможения.
Решение
Аналитическое выражение переключательной функции (см. пример № 17.2) для его трансформации в текст берем только в нормально-дизъюнктивной форме (НДФ):
FX min = a + c.
В этом выражении буквенные символы соответствуют следующим реальным элементам системы управления электромагнитным тормозом:
Х – электромагнит тормоза (YB);
А – датчик предельного верхнего положения рабочего органа (SQ1);
С – датчик предельного горизонтального правого положения рабочего органа (SQ3);
a = 0 – состояние невключенного датчика SQ1;
c = 0 – состояние невключенного датчика SQ3.
Формулировка условия включения электромагнита:
– «Еслине включится датчик SQ1 илине включится датчик SQ3, то включится электромагнит YB тормоза».
Страниц – в5 + з21 + п35 +б1 = 62.
Условий задач с вариантами – 9
Примеров:з9-3+з10-2+з11-4+з12-4+з13-3+з14-2 +з15-4+з16-2+з17-4 = 28
Рисунков – з(2-0-2-1-1-0-3-0-0) + п(4+2+2+2+4+3+8+4+3)
з9 + п32 = 41
Таблиц – з(2-2-2-2-1-1-2-2-2) + п(0+1+0+1+0+0+0+0+3)
з16 + п5 = 21
Нормоконтролер З.И. Бондарева
Дата добавления: 2016-03-20; просмотров: 1288;