Принцип действия и классификация электромеханических электроизмерительных приборов
Электромеханические измерительные преобразователи и приборы относятся к аналоговым устройствам, показания которых являются непрерывной функцией изменений измеряемой величины. В этих приборах значение измеряемой величины преобразуется в пропорциональное отклонение указателя (например, стрелки). Широко распространены электромеханические вольтметры, амперметры, омметры, фазометры, ваттметры, счетчики активной и реактивной энергии.
Электромеханический прибор состоит из двух основных частей: измерительной цепи и электромеханического измерительного преобразователя (измерительного механизма). Измерительная цепь, обычно представляющая собой масштабный измерительный преобразователь, преобразует измеряемую величину в другую величину, непосредственно воздействующую на измерительный механизм. В измерительном механизме, состоящем из подвижной и неподвижной частей, электромагнитная энергия этой величины преобразуется в механическую энергию перемещения подвижной части относительно неподвижной. Поскольку обычно применяется угловое перемещение, в дальнейшем будут рассматриваться не силы, а моменты, действующие в приборе.
На основании второго закона Ньютона запишем для подвижной части измерительного механизма уравнение моментов, действующих на подвижную часть:
 (8.1)
(8.1)
где  – момент сил инерции; J – момент инерции подвижной части; ∝ – угол поворота подвижной части; t – время; Мвр – вращающий момент; Мпр – противодействующий момент; Мусп – момент успокоения.
– момент сил инерции; J – момент инерции подвижной части; ∝ – угол поворота подвижной части; t – время; Мвр – вращающий момент; Мпр – противодействующий момент; Мусп – момент успокоения.
Вращающий момент возникает и однозначно определяется измеряемой величиной х, но в общем случае может зависеть также от угла поворота подвижной части, то есть Мвр = F(x, ∝).
Для электромеханических приборов, в которых действуют силы электромагнитного поля, Мвр определяется из общего уравнения динамики системы
 (8.2)
(8.2)
где Wэм – энергия электромагнитного поля, сосредоточенная в измерительном механизме.
В зависимости от способа создания вращающего момента перемещения подвижной части, электромеханические измерительные преобразователи подразделяются на магнитоэлектрические, электромагнитные, электростатические, электродинамические, ферродинамические и индукционные (рис. ).
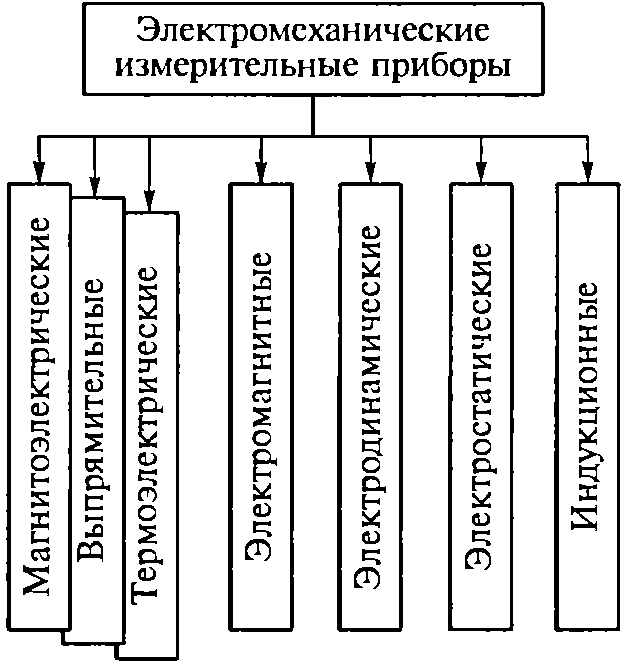
Рис. 3.1. Классификация электромеханических измерительных приборов
Чтобы угол отклонения ∝ однозначно зависел от измеряемой величины, в измерительном механизме создается противодействующий момент Мпр, направленный навстречу вращающему и зависящий от угла поворота. Таким образом, при возникающем динамическом равновесии (Мвр + Мпр = 0) каждому определенному значению измеряемой величины соответствует определенный угол поворота подвижной части.
По способу создания противодействующего момента измерительные механизмы делятся на две группы: с механическим противодействующим моментом и с электрическим противодействующим моментом – логометры.
В измерительных механизмах первой группы противодействующий момент создается с помощью упругого элемента (спиральной пружины, растяжек или подвеса), который при повороте подвижной части закручивается. При этом значение Мпр определяется из выражения
Мпр = – W∝, (8.3)
где W – удельный противодействующий момент, зависящий от свойств упругого элемента. В таких измерительных механизмах угол ∝ определяется электрической величиной, создающей вращающий момент (электрический ток, напряжение, их произведение и т. д.).
В логометрах противодействующий момент создается так же, как и вращающий, но один из моментов должен зависеть от угла поворота подвижной части. В этом случае угол поворота будет определяться отношением электрических величин, создающих вращающий и противодействующий моменты (например, отношением токов).
При перемещении подвижной части на нее, кроме указанных моментов, действуют динамические моменты: момент сил инерции и момент успокоения, пропорциональный скорости движения подвижной части d∝/dt.
 (8.4)
(8.4)
где Р – коэффициент успокоения. Знак «минус» показывает, что момент успокоения, так же как и противодействующий, направлен навстречу вращающему моменту. Мусп обеспечивает плавное и апериодическое движение подвижной части измерительного механизма. От него в значительной степени зависит важный эксплуатационный параметр прибора – время успокоения. Момент успокоения создается либо специальными успокоительными узлами (демпферами), либо без них.
Если выражения (8.3) и (8.4) подставить в уравнение (8.1) и перенести в левую часть, то получится дифференциальное уравнение второго порядка с постоянными коэффициентами, описывающее движение подвижной части измерительного механизма:
Дата добавления: 2016-02-13; просмотров: 4387;