Скоростные характеристики движений рук
| Движения | Характеристика движения | Оценка скоростных характеристик движения |
| Поступательные в режиме фиксации | Время движения, с |  где R — расстояние движения;
где R — расстояние движения;
 —размер органа управления —размер органа управления
|
| Поступательные в свободном режиме | τдВ=0,16 + 0,006 R | |
| Вращательные | Частота вращения, об/с | Максимальная: для ведущей руки—4,83 для неведущей руки—4,0 Оптимальная при усилии до 50 Н: радиусом до 50 мм—2,21 радиусом до 100 мм—1,67 |
| Нажимные | Темп, нажим в секунду | При усилии до 0,25 Н: для ведущей руки—6,68 для неведущей руки—5,30 При усилии до 4 Н: для ведущей руки—6,14 для неведущей руки—5,59 |
| Ударные | Темп, удар в секунду | Максимальный—14, средний — 8,5. Оптимальный при продолжительной работе от 1,5 до 5,0 |
| Дискретные в ответ на периодически поступающие сигналы | Интервал между сигналами | Не менее 0,5 с, в противном случае реакция на новый сигнал происходит с запаздыванием |
время движения пальцев принять за единицу, то на движение кисти и пальцев нужно две единицы времени; предплечья, кисти и пальцев — три, руки в плечевом суставе — четыре, на наклон корпуса и подъем его из этого положения — семнадцать единиц.
Скорость движения зависит также от их направления. Более быстрые движения: к телу, в вертикальной плоскости, сверху вниз, справа налево, вращательные, с большой амплитудой. Менее быстрые движения: от тела, в горизонтальной плоскости или под углом, снизу вверх, слева направо, поступательные, с малой амплитудой.
В случаях, когда движение выполняется в ответ на часто поступающие внешние дискретные сигналы, человек способен реагировать на каждый сигнал только в том случае, если интервал между сигналами не менее 0,5 с. Если же второй сигнал подается через более короткий промежуток времени, то начало реакций на него задерживается до завершения реакции на предыдущий сигнал. Данный эффект называется психологической рефракторной фазой.
К пространственным характеристикам движений оператора относятся размеры моторного поля (зоны досягаемости) и траектории движений. Моторная деятельность оператора характерна прежде всего тем, что моторные координации являются тонкими, следовательно, в подавляющем большинстве случаев все движения осуществляются без перемещения туловища.
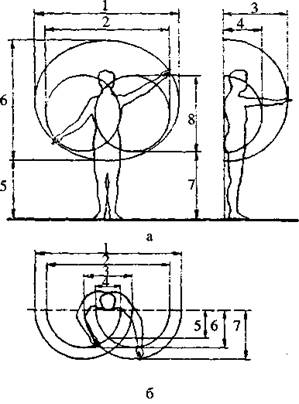
Рис. 14.1. Зоны досягаемости рук человека: а — в вертикальной плоскости (1,3,6 — зоны максимальной досягаемости;
2,4,8 — зоны допустимой досягаемости);
б — в горизонтальной плоскости (1,7 — зоны максимальной
досягаемости; 2,6 - зоны допустимой досягаемости;
3,5 — зоны оптимальной досягаемости).
Исходя из этого, размеры моторного поля (при неподвижном положении туловища) определяются длиной вытянутой руки оператора. В моторном поле различают три зоны — максимальной, допустимой и оптимальной досягаемости. Размеры этих зон в горизонтальной и вертикальной плоскостях показаны на рис. 14.1 ив табл. 14.2.
В зонах оптимальной и допустимой досягаемости возможны наиболее быстрые и точные движения при минимальной утомляемости оператора. Поэтому здесь рекомендуется располагать наиболее важные и часто используемые органы управления. Следует также отметить, что в зависимости от требуемых усилий и точности движений в этих зонах существуют некоторые рациональные уровни. Так, например, рычаги, требующие для своего перемещения больших усилий, следует размещать на нижних уровнях оптимальной зоны. Требования же к точности перемещения легче всего удовлетворяются на средних уровнях.
Таблица 14.2
Дата добавления: 2016-03-05; просмотров: 905;