Психомоторика оператора
Любому управляющему действию оператора предшествуют те или иные психические процессы. Реализация психической деятельности посредством движений, как отмечалось в главе II, носит название психомоторики. Объективно психомоторика проявляется в психомоторных процессах. Основу их составляют идеомоторные, эмоционально-моторные и сенсомоторные процессы.
Идеомоторные процессы, или идеомоторика (от греч. idea — идея, образ и лат. motor — приводящий в движение) связывают представление о движении с его реальным осуществлением. Эти процессы имеют большое значение при построении мысленных (идеальных) моделей деятельности оператора, при проведении тренировок, решении различного рода «вводных».
Эмоционально-моторные процессы отражают влияние различного рода эмоций на устойчивость двигательных актов. Эмоции могут при определенных условиях вызвать нарушения нормального протекания, психомоторных процессов или эмоционально-моторную напряженность. Последняя проявляется в позе, мимике, чрезмерно замедленных движениях, неадекватной нагрузке, усилении ряда вегетативных функций. Для многих видов операторской деятельности профессионально значимым качеством является эмоционально-моторная устойчивость, то есть сохранение профессиональных двигательных навыков в условиях действия экстремальных факторов [128].
Сенсомоторные процессы, или сенсомоторика (от лат. sensus — чувство, ощущение) определяют взаимосвязь сенсорных и моторных (двигательных) компонентов психической деятельности. С помощью этих процессов осуществляется связь восприятия и движения, которая проявляется в виде сенсомоторных реакций или сенсомоторной координации.
Сенсомоторной реакцией называется одиночное (дискретное) движение оператора на появление (прекращение действия) того или иного раздражителя. Изучение сенсомоторных реакций имеет большое значение для инженерной психологии. Это обусловлено следующими причинами. Во-первых, многие виды операторской деятельности в той или иной степени представляют собой совокупность различных видов сенсомоторных реакций. Во-вторых, время реакции может использоваться как один из показателей психофизиологического состояния оператора или готовности его к выполнению определенного вида деятельности. В-третьих, время реакции очень часто используется как индикатор при инженерно-психологических измерениях и исследованиях.
Различают следующие типы сенсомоторных реакций: простая, сложная и реакция на движущийся объект.
Простая сенсомоторная реакция заключается в ответе заранее известным простым одиночным движением на внезапно появляющийся, но заранее известный сигнал. Основной показатель такой реакции — время, которое складывается из двух составляющих: латентного (скрытого) периода и времени моторного акта.
В реальных процессах работы оператора простые сенсомоторные реакции встречаются сравнительно редко. Наиболее характерными являются сложные реакции, в которых требуемое действие оператора зависит от вида и характера поступившего сигнала. Например, каждому из сигналов соответствует включение своего тумблера. При анализе сложных реакций необходимо иметь в виду, что движения в той или иной степени осуществляются под контролем зрительной системы. Многие элементы программы двигательного акта формируются еще до начала движения, по отношению к которому зрительная система выступает в роли задающего устройства. Таким образом, сенсорная и моторная компоненты времени реакции (ВР) имеют на оси времени общий участок (на рис. 14.3 он обозначен штриховкой). Это означает, что в это время начинают работать несколько параллельных уровней регуляции [116].
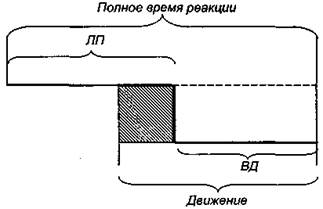
Рис. 14.3. Соотношение между различными компонентами
сенсомоторной реакции: ЛП — латентный период;
ВД — время движения.
При изучении управляющих движений большое значение имеет анализ ошибочных реакций оператора. Наиболее полно и систематично этот вопрос рассмотрен в работе [192]. Установлено, например, что число ошибок существенно зависит от вида и направления движения (табл. 14.5).
На основании данных табл. 14.5 можно сделать ряд важных выводов по сокращению числа ошибочных реакций оператора. Из трех основных направлений поступательных движений (вверх-вниз, вперед-назад и вправо-влево) лучшими по числу ошибок являются первые. Им несколько уступают продольные движения (вперед-назад). Поперечные движения (вправо-влево) дают гораздо большую частоту ошибок, поэтому при конструировании рабочих мест оператора их следует всячески исключать. Для рассмотренных движений имеются также направления, для которых вероятность ошибки меньше, чем для противоположных. Такими направлениями являются вверх, вперед и вправо. Преимущество этих направлений обнаружено для обеих рук.
Особенно большую частоту ошибок и пропусков дают поворотные движения рук вокруг продольных осей. Поэтому при создании рабочих мест целесообразно отказаться от применения поворотных рукояток в тех случаях, когда необходимо обеспечить минимальную частоту ошибочных действий оператора. Если все же параллельно с дискретными действиями оператор должен выполнять операции точного регулирования или слежения, лучшим распределением функций является следующее: правая рука осуществляет точные непрерывные движения, а левая выполняет дискретные действия.
Таблица 14.5
Дата добавления: 2016-03-05; просмотров: 1140;