Якорные системы удержания
Буровое плавсредство и систему заякоривания рассматривают как единый комплекс, за исключением случаев экстремальных погодных условий.
Система заякоривания включает якорные цепи, лебедку, стопорное устройство, роульс (устройство для изменения направления перемещения якорного троса). В зависимости от местных условий, характеристики бурового плавсредства и других факторов применяют различные схемы расположения якорных цепей или канатов относительно ПБС.
На рис. 15 показаны шесть наиболее распространенных в мировой практике вариантов заякоривания при воздействии нагрузок с любой стороны; n- число якорных канатов.
Якорные цепи или тросы выбирают в зависимости от ожидаемой нагрузки на них, глубины моря, характеристики рабочего оборудования, стоимости, наличия пространства для палубных устройств и других факторов.
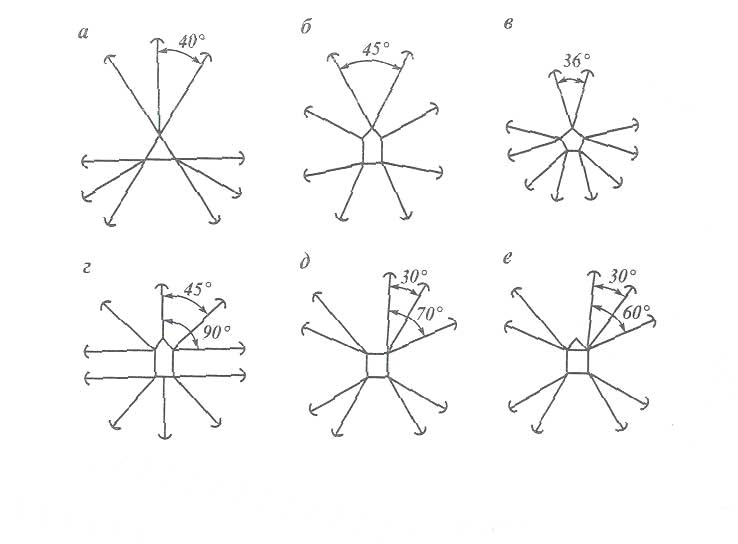
Рис. 15- Типовых вариантов систем заякоривания: а,б,в – симметричные системы соответственно с n-9,8,10; г,д,е – системы с якорными канатами (n =8), расположенными соответственно под углом 45-900 друг к другу, порд углом 30-700 к оси платформы и под углом 30-600 к продольной оси судна
Для заякоривания применяют два типа плоскозвенных цепей с распоркой: цепь со сваренным встык звеньями и замковую цепь. В большинстве случаев для заякоривания применяют металлические канаты диаметром 57-76 мм (иногда 90мм). Преимущества металлических канатов: масса каната в морской воде ниже стоимости цепи. Недостаток металлического каната заключается в том, что вследствие малой массы требуется большое развертывание троса до необходимой величины тангенциальной кривой провисания, а также в случае выхода каната из строя его следует заменять по всей длине.
Якорные системы оснащают комплексом оборудования для регулирования натяжения якорных канатов, который включает тензометры и записывающую аппаратуру, непрерывно управляющую натяжением якорного каната и извещающую оператора об изменении высоты волны или направления ветра.
Системой управляют с пульта на основе информации, получаемой от датчиков, устанавливаемых на тросах.
Система динамической стабилизации.
На глубинах морей более 200 м якорные системы стабилизации не обеспечивают требуемые допускаемые отклонения ПБС о вертикальной оси бурящейся скважины, становятся массивными, и их применение неэффективно. По этим причинам на глубинах более 200 м используют динамические системы стабилизации (динамического позицирования), которые по сравнению с якорными системами удержания имеют следующие преимущества:
§ Обеспечивают требуемую технологией бурения точность позицирования ПБС;
§ Осуществляют быстрое изменение курса БС или ППБУ в целях уменьшения бортовой и вертикальной качек;
§ Обеспечивают быстрый уход с точки бурения и возврат на нее ПБС.
Система динамической стабилизации представляет собой замкнутую цепь автоматического управления. Она включает:
1. Цепь обратной связи с датчикам, определяющими координаты продольного и поперечного перемещения по осям х, у и угол поворота φ ПБС относительно принятых неподвижных координат;
2. блок сравнения, который определяет отклонения Δх, Δу и Δφ действующего положения ПБС от его начального расчетного положения х0, у0, φ0 ;
3. пульты управления, имеющие прямые и обратные связи с двигателями и гребными винтами, рассчитывающие и подающее командного пункта на двигатели и гребные винты команды для возвращения ПБС в начальное положение.;
4. подруливающие устройства (двигателей и гребных винтов), обеспечивающие перемещение судна на величину Δх, Δу и Δφ и возвращение егов начальное положение.
На автоматизированном пункте управления универсальная ЭВМ по цепи обратной связи получает данные от внешних датчиков о положении ПБС в определенный момент. При этом угол поворота определяют гидрокомпасом, а координаты х, у вычисляются системой акустического измерения АМS. Эти данные имеют высокую точность, их используют в системе динамической стабилизации.
В системе динамической стабилизации имеются две ЭВМ: одна работает, а вторая в резерве. Система автоматической стабилизации включается в работу и контролируется оператором с главного пульта управления.
Осн.: 2. [ 207-209 ], 3. [ ]
Доп.: 7. [987-993]
Контрольные вопросы:
1. Какие системы удержания вы знаете?
2. Из чего состоит якорная система?
3. Из чего состоит система динамической стабилизации?.
4. Чем отличаются эти две системы удержания ПБС ?
Дата добавления: 2016-02-24; просмотров: 1679;