Силовой баланс автомобиля при различной нагрузке
Практическое применение рассмотренного выше силового баланса автомобиля затруднительно, так как для определения показателей тягово-скоростных свойств необходимо построить отдельные графики для разных значений нагрузки на автомобиль. Это связано с тем, что при изменении нагрузки сила сопротивления дороги РД и суммарная сила сопротивления дороги и воздуха Рд + РВ изменяются и для их вычисления требуются дополнительные затраты времени.
Более универсальным является рассмотренный ниже метод силового баланса автомобиля при различной нагрузке. В этом случае строится только один график силового баланса для всех эксплуатационных нагрузок автомобиля.
В основу метода силового баланса автомобиля при различной нагрузке положено уравнение его движения (3.20), представленное в следующем виде:

или
где  — свободная тяговая сила.
— свободная тяговая сила.
Безостановочное движение автомобиля возможно при выполнении
условия  ; автомобиль движется без буксования ведущих колес в том случае, если .
; автомобиль движется без буксования ведущих колес в том случае, если . 
Для оценки тягово-скоростных свойств при различной нагрузке на автомобиль строится график его силового баланса (рис. 3.23).
Методика построения графика силового баланса такова:
• строят тяговую характеристику автомобиля ; 
• на график тяговой характеристики наносят кривые свободной тяговой силы Рсв для различных передач;
• слева от графика тяговой характеристики автомобиля строят вспомогательный график для определения коэффициента сопротивления дороги ψ. С этой целью ось абсцисс продолжают влево и на нее в произвольном масштабе наносят шкалу коэффициента сопротивления дороги ψ;
• справа от графика тяговой характеристики автомобиля строят вспомогательный график для определения коэффициента сцепления колес с дорогой ψх. Для этого ось абсцисс продолжают вправо на нее в произвольном масштабе наносят шкалу коэффициента сцепления ψx.;
• из начала координат вспомогательных графиков проводят лучи, соответствующие различным значениям нагрузки на автомобиль.
Для определения углов наклона лучей нагрузки на левом вспомогательном графике задают какое-либо значение свободной тяговой силы Рсв, откладывают это значение на оси ординат и проводят горизонтальную прямую. Затем по формуле
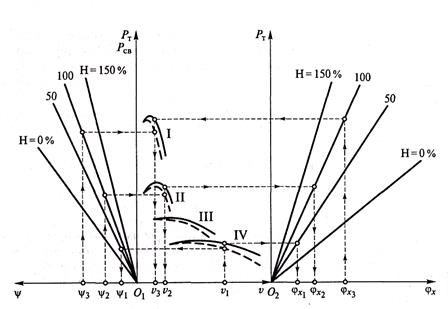
Рис. 3.23. График силового баланса автомобиля при различной нагрузке
:находят значения коэффициента ψ для разных нагрузок (Н = 0 % при G - G0; Н = 100 % при G = Gа и т. д., где G — вес автомобиля при заданной нагрузке Н, представляющей собой долю груза, %, который может быть перевезен на данном автомобиле; (G0 — вес снаряженного (порожнего) автомобиля; Gа — вес автомобиля при полной нагрузке). Из точек, соответствующих найденным значениям коэффициента ψ, проводят вертикали до пересечения с горизонтальной линией, проходящей через точку, отвечающую выбранному значению свободной тяговой силы Рсв. Полученные точки пересечения соединяют с началом координат левого вспомогательного графика и у каждого луча указывают соответствующее значение нагрузки на автомобиль, % или пасс.
Для определения углов наклона лучей нагрузки на автомобиль на правом вспомогательном графике задают какое-либо значение тяговой силы Рт, откладывают это значение на оси ординат и проводят горизонтальную линию. Затем по формуле
 находят значения коэффициента у для разных нагрузок (Н = 0 % при G = G0; Н = 100 % при G = Ga и т.д., где G — вес автомобиля при заданной нагрузке Н, представляющей собой долю груза, %, который может быть перевезен на данном автомобиле; G0 — вес снаряженного (порожнего) автомобиля; Gа — вес автомобиля при полной нагрузке). Из точек, соответствующих найденным значениям коэффициента ψ, проводят вертикали до пересечения с горизонтальной линией, проходящей через точку, отвечающую выбранному значению свободной тяговой силы Рсв. Полученные точки пересечения соединяют с началом координат левого вспомогательного графика и у каждого луча указывают соответствующее значение нагрузки на автомобиль, % или пасс.
находят значения коэффициента у для разных нагрузок (Н = 0 % при G = G0; Н = 100 % при G = Ga и т.д., где G — вес автомобиля при заданной нагрузке Н, представляющей собой долю груза, %, который может быть перевезен на данном автомобиле; G0 — вес снаряженного (порожнего) автомобиля; Gа — вес автомобиля при полной нагрузке). Из точек, соответствующих найденным значениям коэффициента ψ, проводят вертикали до пересечения с горизонтальной линией, проходящей через точку, отвечающую выбранному значению свободной тяговой силы Рсв. Полученные точки пересечения соединяют с началом координат левого вспомогательного графика и у каждого луча указывают соответствующее значение нагрузки на автомобиль, % или пасс.
Для определения углов наклона лучей нагрузки на автомобиль на правом вспомогательном графике задают какое-либо значение тяговой силы Рт, откладывают это значение на оси ординат и проводят горизонтальную линию. Затем по формуле

находят значения коэффициента сцепления для разных нагрузок (Н = 0 % при G02; Н = 100 % при Gа2 и т.д., где G2 — вес, приходящийся на задние (ведущие) колеса автомобиля при заданной нагрузке; G02 и Gа2 — вес, приходящийся на ведущие колеса соответственно снаряженного автомобиля и автомобиля при полной нагрузке).
Вес автомобиля при заданной нагрузке
где GГР — полезная нагрузка на автомобиль, Н (грузовые автомобили) или пасс, (легковые автомобили, автобусы).
Вес на ведущие колеса при заданной нагрузке
где (G02 и Ga2 )— вес, приходящийся на ведущие колеса соответственно снаряженного автомобиля и с полной нагрузкой, Н или пасс.
Через точки, соответствующие найденным значениям коэффициента сцепления φх при разных нагрузках на автомобиль и ведущие колеса, проводят вертикальные линии до пересечения с горизонталью, которая проходит через точку, отвечающую выбранному значению тяговой силы PT Полученные точки пересечения соединяют с началом координат правого вспомогательного графика и соответствующих лучей указывают значения нагрузки на автомобиль, % или пасс. При расчете нагрузок используют значения G02 и Gа2 из технической характеристики автомобиля.
С помощью графика силового баланса автомобиля при различной нагрузке можно решить ряд задач по анализу и оценке тягово-скоростных свойств автомобиля. При этом из четырех параметров (скорость автомобиля  , нагрузка на автомобиль Н, коэффициент сопротивления дороги
, нагрузка на автомобиль Н, коэффициент сопротивления дороги  и коэффициент сцепления колес с дорогой
и коэффициент сцепления колес с дорогой  х) можно определить два любых параметра по двум другим заданным. При этом найденные значения коэффициента сопротивления дороги являются максимально возможными, а значения коэффициента сцепления х — минимально необходимыми для движения автомобиля при различных нагрузках.
х) можно определить два любых параметра по двум другим заданным. При этом найденные значения коэффициента сопротивления дороги являются максимально возможными, а значения коэффициента сцепления х — минимально необходимыми для движения автомобиля при различных нагрузках.
Рассмотрим несколько примеров решения задач
Пример 1. Известны скорость автомобиля ] и нагрузка Н, (50 %). Необходимо определить, какое максимальное сопротивление дороги, характеризуемое коэффициентом ψ1, может преодолеть автомобиль и какой минимальный коэффициент сцепления φx1 необходим для движения без буксования ведущих колес в этом случае.
Найдем значение известной скорости движения 1на оси абсцисс тяговой характеристики автомобиля и проведем вертикаль до пересечения с кривыми тяговой силы РT и свободной тяговой силы Рсв. Из точки пересечения вертикали с кривой Рсв проведем горизонтальную линию влево, до пересечения с лучом заданной нагрузки Н1 = 50 %, и из полученной точки опустим перпендикуляр на ось абсцисс левого дополнительного графика, определяя при этом максимальное значение коэффициента сопротивления дороги ψ1 Затем из точки пересечения вертикали с кривой тяговой силы РT проведем вправо горизонтальную линию до пересечения с лучом нагрузки Н1 = 50 % и, опустив из точки пересечения перпендикуляр на ось абсцисс правого дополнительного графика, найдем минимальный коэффициент сцепления φx1 который необходим для движения автомобиля без буксования ведущих колес.
П р и м е р 2. Известны коэффициент сопротивления дороги ψ2 и нагрузка Н2 (100 %). Требуется определить, с какой скоростью v2 может двигаться автомобиль на II передаче и какой коэффициент сцепления φХ2 обеспечит движение без буксования ведущих колес.
На оси абсцисс левого графика найдем значение коэффициента сопротивления дороги φx2 и проведем вертикальную линию до пересечения с лучом заданной нагрузки Н2 = 100 %. Из полученной точки пересечения проведем горизонтальную линию вправо, до пересечения с кривой Рсв на II передаче, и, опустив перпендикуляр на ось абсцисс тяговой характеристики, определим искомую скорость 2. Затем для найденной скорости определим тяговую силу Рт на II передаче, проведем через точку, соответствующую этому значению Рт, горизонталь вправо, до пересечения с лучом нагрузки Н2 = 100 %, и, опустив перпендикуляр, найдем минимальный коэффициент сцепления φХ2, необходимый для движения автомобиля без буксования ведущих колес.
П р и м е р 3. Известны коэффициенты ψ3 и φx3. Следует определить скорость движения 3 нагрузку Н3 на автомобиль.
Из точек, соответствующих значениям коэффициентов ψ3 и φхз на осях абсцисс дополнительных графиков, проведем вертикали до пересечения с лучами всех нагрузок, а из точек пересечения — горизонтали до пересечения с кривыми Рсв и РT на всех передачах. Полученные точки пересечения, расположенные на одних вертикалях при одинаковых нагрузках, соответствуют искомым скорости движения v3 и нагрузке Н3 ==100 % на автомобиль.
Метод силового баланса удобен для анализа тягово-скоростных свойств конкретного автомобиля. Сравнивать же разные автомобили этим методом затруднительно, так как значения тяговой силы у них могут отличаться в несколько раз, да и масса их также неодинакова.
Поэтому для сравнительной оценки тягово-скоростных свойств разных автомобилей удобнее пользоваться их динамическими факторами и динамическими характеристиками.
Дата добавления: 2016-02-20; просмотров: 2308;