ОСНОВНЫЕ РЕЖИМЫ РАБОТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ
ПО НАГРЕВУ
ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ДЛЯ ПРОИЗВОДСТВЕННЫХ МЕХАНИЗМОВ
Цель:изучить основные критерии выбора электродвигателей, режимы работы электродвигателей по нагреву и методы расчета их номинальной мощности при различных режимах работы (продолжительном с постоянной и переменной нагрузками, повторно-кратковременном и кратковременном).
Наиболее трудоемким и ответственным этапом проектирования электропривода для производственного механизма является выбор электродвигателя. Задача выбора состоит в поиске такого двигателя, который обеспечит по мощности заданный технологический цикл рабочей машины, будет соответствовать условиям окружающей среды, компоновке с рабочей машиной и при этом иметь нормативный (допустимый) нагрев. В общем случае электропривод должен удовлетворять ряду требований, даже противоречивых (поэтому при выборе электродвигателя в конкретном случае приходится руководствоваться технико-экономическими соображениями).
Для электропривода производственного механизма следует выбирать наиболее простой двигатель по устройству и управлению, экономичный и надежный в эксплуатации, имеющий наименьший вес, габариты и стоимость. Вместе с тем двигатель должен полностью удовлетворять требованиям технологического процесса и соответствовать условиям окружающей среды, в которой он будет находиться во время эксплуатации.
Для правильного выбора электродвигателя для конкретного производственного механизма следует руководствоваться критериями выбора по следующим показателям: мощности, скорости, напряжению, роду тока, условиям эксплуатации, конструктивному исполнению монтажа.
Мощность электродвигателя должна соответствовать нагрузке на его валу, так как недостаточная мощность может привести к нарушению нормальной работы механизма, снижению его производительности, перегреву электродвигателя (из-за возможных перегрузок) и сокращению его срока службы и даже к возникновению аварийной ситуации, а излишняя мощность увеличивает капитальные затраты и эксплутационные расходы вследствие недогрузки электродвигателя и снижения его КПД (у АД коэффициента мощности). Поэтому определение номинальной мощности электродвигателя выполняют в соответствии с нагрузочными диаграммами механизмов и режимами их работы.
Скорость электродвигателя выбирается такой, чтобы обеспечить необходимый технологический процесс производственного механизма. При заданном передаточном числе редуктора или другой передачи этот вопрос решается однозначно, т.е. по известному передаточному отношению и заданной скорости производственного механизма. Выбор номинальной скорости электродвигателя и передаточного числа редуктора вновь проектируемого электропривода должен производиться путем технико-экономического сравнения нескольких вариантов, исходя из определенного критерия оптимальности: быстродействия, минимума стоимости редуктора, двигателя и др.
Выбор электродвигателя по напряжению для механизмов действующего предприятия производится по напряжениям существующих на предприятии сетей переменного и постоянного тока. Выбор напряжения для питания электродвигателей вновь сооружаемого предприятия решается совместно с выбором напряжений для всего предприятия в целом путем технико-экономического сравнения нескольких вариантов электроснабжения.
АД малой и средней мощности выпускаются с номинальными напряжениями 220/127, 380/220 и 660 В. АД и СД средней и большой мощности выпускаются на напряжения 3, 6 и 10 кВ. Наиболее распространенными номинальными напряжениями двигателей постоянного тока (ДПТ) являются 110, 220 и 440 В. При значительной мощности ДПТ номинальные напряжения лежат в пределах 660…900 В.
По роду тока для производственных механизмов могут применяться ДПТ с различным возбуждением (параллельного, независимого, последовательного, смешанного) и переменного тока: АД с короткозамкнутым или фазным ротором и СД.
Наиболее простыми по устройству и управлению, надежными и экономичными в эксплуатации, имеющими наименьший вес, габариты и стоимость при определенной мощности, являются АД с короткозамкнутым ротором. Их вес на единицу мощности в 1,5…2,0 раза ниже, чем у ДПТ.
АД по сравнению с ДПТ имеют еще одно преимущество: питание их осуществляется непосредственно от сети трехфазного тока, т.е. для них не требуются сложные и дорогие преобразовательные устройства переменного тока в постоянный.
Чаще всего АД применяются при невысокой частоте включений, когда не требуется регулирование скорости или возможно ее ступенчатое регулирование. В настоящее время перспективными являются и установки с глубоким регулированием скорости АД при частотном управлении.
В установках, где требуется регулирование в относительно небольших пределах, плавный пуск, хорошие тормозные качества, ограничение токов в переходных режимах, применяются АД с фазным ротором. Характерной особенностью этих двигателей является уменьшение с помощью реостатов их пусковых токов при одновременном увеличении пускового момента. АД с фазным ротором широко применяется для привода механизмов с частыми пусками и торможениями.
Для механизмов средней и большой мощности, где не требуется регулирование скорости, перспективным является использование СД, которым присущи такие положительные качества, как жесткость механической характеристики, высокая перегрузочная способность, меньшая по сравнению с АД зависимость критического момента от напряжения сети, высокие энергетические показатели, возможность компенсации реактивной энергии.
Для механизмов с высокими требованиями в отношении регулирования скорости, качества работы в динамических режимах, с частыми пусками и остановами применяются электродвигатели постоянного тока, при этом в зависимости от характера статического момента на валу и диапазона регулирования используются ДПТ независимого (параллельного), последовательного или смешанного возбуждения. Их использование в этих случаях связано с необходимостью применения преобразователей переменного тока в постоянный.
В регулируемых электроприводах применяют системы, которые при выполнении технологических требований оказываются более выгодными экономически. Поэтому чаще всего экономическое сравнение регулируемых электроприводов ведут в такой последовательности: полюснопереключаемые АД, АД с фазным ротором и реостатным регулированием скорости, система «управляемый преобразователь напряжения – ДПТ», система «преобразователь частоты – АД».
При выборе электродвигателя необходимо учитывать условия эксплуатации, под которыми понимают воздействие климатических факторов и состояние окружающей среды. Электродвигатели изготавливаются для работы в умеренном климате, умеренном и холодном, тропическом, морском. Климатические условия характеризуются максимальной, минимальной и средней температурами. Например, эти температуры составляют + 40, -45 и +10 ºС – для умеренного климата, +45, -10 и +27 ºС – для тропического, +40, -40 и +10 ºС – для морского климата.
По способу защиты электродвигателя от воздействия окружающей среды различают:
– защищенные электродвигатели, у которых все вращающиеся и токоведущие части предохранены от случайного прикосновения человека и попадания внутрь посторонних предметов и капель воды, падающих отвесно или под углом не более 60º к вертикали (у этих двигателей имеются защитные приспособления в виде коробов, решеток, сеток);
– закрытые электродвигатели, которые бывают обдуваемые, продуваемые и герметические. У обдуваемых электродвигателей (с самовентиляцией) на валу укреплен вентилятор, который засасывает воздух и прогоняет его через ребристый корпус. У продуваемых электродвигателей (с независимой вентиляцией) воздух для охлаждения подводится через трубы отдельным от двигателя вентилятором. Герметические (взрывозащитные) электродвигатели предназначены для работы во взрывоопасных помещениях.
По способу вентиляции двигатели выполняются с естественной, с самовентиляцией и независимой вентиляцией. При естественной вентиляции двигатели не имеют каких-либо специальных устройств для охлаждения. У двигателей с самовентиляцией охлаждение осуществляется вентилятором, смонтированным на валу двигателя. При закрытом исполнении вентилятор устанавливается снаружи под колпаком. Он обдувает ребристую поверхность двигателя (такие двигатели называются обдуваемыми).
Интенсивность охлаждения электродвигателей с естественной вентиляцией и самовентиляцией зависит от угловой скорости вала двигателя и ухудшается при ее снижении. Охлаждение двигателей при независимой вентиляции осуществляется с помощью специального вентилятора, приводимого в движение дополнительным двигателем, что позволяет несколько повысить нагрузку главного двигателя, особенно при снижении его скорости.
Закрытые электродвигатели более сложны по конструкции защитных устройств. Они не имеют специальных отверстий для обмена воздухом между двигателем и окружающей средой. Взрывозащищенные двигатели снабжаются специальным кожухом, который без повреждений может противостоять взрыву внутри двигателя и препятствует распространению пламени в окружающую среду. Водозащищенные двигатели выполняются с усиленными уплотнениями крышек при помощи резиновых прокладок, а выступающий конец вала проходит через специальный сальник. У герметичных двигателей все отверстия и соединения закрыты и уплотнены так тщательно, что исключается всякое сообщение между внутренним пространством машины и внешней газовой средой или жидкостью. Герметичные двигатели могут работать погруженными в воду.
Выбор электродвигателя по способу защиты от действия окружающей среды должен производиться в зависимости от условий, в которых он будет работать.
Большое значение имеет правильный выбор электродвигателя по конструктивному исполнению в отношении монтажа. Для большинства производственных механизмов применяют электродвигатели с горизонтальным расположением вала и лапами для крепления к несущим конструкциям. Для некоторых механизмов целесообразным является применение двигателей с вертикальным расположением вала и креплением на лапах. Выпускаются электродвигатели с вертикальным или горизонтальным расположением вала и фланцевым креплением. В наибольшей степени в конструктивные формы механизмов вписываются встраиваемые электродвигатели, которые не имеют станины, подшипниковых щитов, а иногда и вала. Монтируются они в корпусах производственных механизмов и иногда непосредственно выполняют функции рабочих органов.
Для обозначения конструктивного исполнения по способу монтажа применяют латинские буквы IM (от англ. International Mounting) и следующие за ними четыре цифры. Первая цифра показывает группу конструктивного исполнения (на лапах, без лап, с фланцем и т.д.), вторая и третья – способы монтажа, а четвертая – исполнение конца вала (цилиндрический, конический и др.). Например: IM1001 – электродвигатель с двумя подшипниковыми щитами, на лапах, вал горизонтальный; IM1011 – то же, но с вертикальным валом.
Нагрев и охлаждение электродвигателей. Процесс преобразования электрической энергии в механическую в электродвигателе сопровождается потерями мощности ∆Р, которые превращаются в тепло. В результате отдельные части электродвигателя нагреваются. Особенно чувствительна к повышению температуры изоляция обмоток, срок службы которой в значительной мере определяет срок службы электродвигателя. Поэтому наибольшая допустимая температура tºдоп электродвигателя определяется применяемыми изоляционными материалами для изготовления его обмоток.
Изоляционные материалы по нагревостойкости делятся на 7 классов (Y, A, E, B, F, H, C), из которых наиболее распространенными для электроприводов являются:
класс А – хлопчатобумажные ткани и шелк, пропитанные в жидком диэлектрике, tºдоп = 105 ºС;
класс Е– синтетические органические пленки (эмали), tºдоп = = 120 ºС;
класс В – слюда, асбест, стекловолокно, tºдоп = 130 ºС;
класс F – слюда, асбест, стекловолокно с синтетическими связывающими веществами и с пропитыванием диэлектрическими составами, tºдоп = 155 ºС.
Срок службы изоляции при указанных предельных температурах примерно 15–20 лет.
Номинальная мощность электродвигателя относится к температуре окружающей среды +40 ºС. При меньшей температуре, чем +40 ºС, допустимая длительная нагрузка электродвигателя может быть больше номинальной, а при температуре окружающей среды более +40 ºС допустимая длительная нагрузка должна быть меньше номинальной.
Для электродвигателей нормируется не допустимая температура обмоток, а допустимое превышение их температуры над температурой окружающей среды, называемое перегревом τ.
При постоянной нагрузке нагрев электродвигателя описывается уравнением
 ,
,
где τy = Q / А – установившийся перегрев, ºС;
Q – количество тепла, выделяемое электродвигателем в единицу времени, Дж / с;
А – количество тепла, отдаваемое электродвигателем в окружающую среду в единицу времени при разности температур в 1 ºС (теплоотдача), Дж / (с × ºС);
τ0 – начальный перегрев (в момент времени t = 0);
Тн = С / А – постоянная времени нагрева, т.е. скорость нарастания температуры электродвигателя;
С – теплоемкость электродвигателя, т.е. количество тепла, необходимое для повышения температуры двигателя на 1 ºС, Дж / ºС.
Зависимость τ = f(t) представлена на рис. 12.1 кривой 1. Величина τy является асимптотой этой кривой. Практически процесс нагревания считается законченным, когда t = (3–4) Tн. Например, при t = 4Tн τ = 0,982 τy, т.е. разница между τ и τy меньше двух процентов.
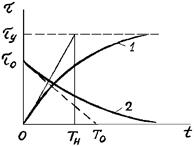
Рис. 12.1. Кривые нагрева (1) и охлаждения (2) двигателя
При отключении от сети нагретого электродвигателя он начнет охлаждаться. Уравнение его охлаждения имеет вид (см. рис. 12.1):
 .
.
Остывание электродвигателя происходит медленнее, чем нагревание, что объясняется отсутствием его вентиляции при ω = 0.
Из приведенных уравнений следует, что процессы нагревания и охлаждения электродвигателя зависят практически от величин τy, Тн и Т0. Величина τy прямо пропорциональна количеству тепла, выделяемого в электродвигателе и определяемого в основном потерями в обмотках, и обратно пропорциональна коэффициенту теплоотдачи, который в значительной степени зависит от вентиляции двигателя: чем лучше вентиляция, тем меньше τy. Установившийся тепловой режим наступает тогда, когда все выделяемое в двигателе тепло отдается в окружающую среду, т.е. когда температура двигателя становится неизменной (τ = τу = const).
Величина Тн зависит от размеров электродвигателя и его конструкции: чем больше размеры, тем больше теплоемкость. А так как Тн прямо пропорциональна теплоемкости С, то с увеличением габаритов электродвигателя она увеличивается. У защищенных электродвигателей малой мощности Тн составляет 20…30 мин, а у закрытых двигателей большой мощности 2–3 ч.
Основные режимы работы электродвигателей по нагреву.Величина нагрузки электродвигателя в процессе его работы может изменяться различным образом, при этом он может периодически или эпизодически отключаться от сети на некоторое время. Поэтому нагрев электродвигателя при его работе не является постоянным. Стандарт устанавливает восемь номинальных режимов работы электропривода с условными обозначениями от S1 до S8. Из них основными являются режимы S1…S3, а остальные (S4…S8) – это модификации основных режимов. Рассмотрим основные режимы:
S1 – продолжительный (или длительный) – перегрев электродвигателя достигает установившегося значения τy (рис. 12.2, а). Длительность рабочего периода tр > 3Тн, длительность паузы роли не играет. В продолжительном режиме работают двигатели насосов, компрессоров, конвейеров, прокатных станов и т.п. Различают продолжительный режим с постоянной и с переменной нагрузкой;
S2– кратковременный – периоды постоянной нагрузки чередуются с отключениями, при этом τ не достигает τy (tр ≤ 3Тн), а во время отключения электродвигатель охлаждается до температуры окружающей среды (t0 > 3Т0), рис. 12.2, б. Для кратковременного режима рекомендуется продолжительность рабочего периода 15, 30, 60, 90 мин. В таком режиме работают электродвигатели подъемников, приводов заслонок, задвижек и т.п.;
S3 –повторно-кратковременный–периоды с постоянной нагрузкой (рабочие периоды) чередуются периодически с отключениями электродвигателя (паузами), при этом перегрев τ за время одного рабочего цикла tц не достигает τy (рис. 12.2, в). При повторно-кратковременном режиме время цикла не более 10 мин (в противном случае двигатель считается работающим в продолжительном режиме по нагреву).
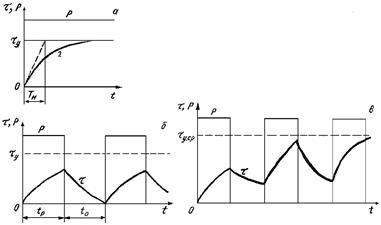
Рис. 12.2. Графики номинальных режимов электроприводов
Повторно-кратковременный режим характеризуется относительной продолжительностью включения ПВ в процентах:
ПВ = tр / (tр + t0) 100 % = (tр / tц) 100 %.
Стандартные значения ПВ = 15, 25, 40 и 60 %.
Повторно-кратковременный режим характеризуется условиями tр < 3Тн, т.е. за время одного рабочего периода перегрев не достигает τy, а за время паузы не становится равным нулю. При многократном повторении циклов процесс нагрева устанавливается (температура перегрева в начале и в конце цикла одинакова, τ колеблется около среднего значения τy.ср). В повторно-кратковременном режиме работают электроприводы кранов, некоторых вспомогательных механизмов прокатных станов и т.п.
Дата добавления: 2015-12-01; просмотров: 4513;