БЕСКОНТАКТНАЯ АППАРАТУРА.
ДАТЧИКИ
Бесконтактная аппаратура находит все более широкое применение в электрооборудовании машиностроительного производства благодаря таким достоинствам, как высокая допустимая частота включений, долговечность, быстродействие, надежность и дромандоаппаратов используются бесконтактные аппараты, в основном сельсинного типа. Для контроля различных физических величин применяются разнообразные датчики: скорости, тока, положения, температуры и др.
В электроприводе металлорежущих станков в качестве датчиков положения широко используются путевые и конечные выключатели. Все более широкое применение находят переключатели, срабатывающие без механического воздействия.
На рис. 11.1 представлена схема датчика положения на основе Геркона, управляемого полем постоянного магнита. В немагнитном корпусе 1 расположены геркон 2 и воздействующий на его контакты постоянный магнит 3. При вхождении в щель ферромагнитной полосы 4 магнитный поток Ф постоянного магнита шунтируется, контакты геркона переключаются, переходя в исходное положение.
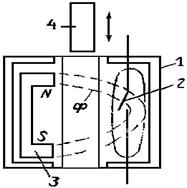
Рис. 11.1. Схема датчика положения на герконе
В бесконтактных системах управления в качестве датчиков положения и задающих устройств широко используются сельсинные командоаппараты в различных исполнениях (рычажном, педальном).
На рис. 11.2, а представлена схема сельсинного командоаппарата. Однофазная статорная обмотка возбуждения сельсина ОВ питается от сети переменного тока частотой 50 Гц. Она создает магнитный поток, который в каждой фазе трехфазной обмотки ротора индуцирует ЭДС. Выходным напряжением сельсина является разность ЭДС фаз 1 и 3 (обмотка фазы 2 не используется):
 ,
,
где b – угол сдвига фаз вторичной и первичной обмоток;
Еmax – максимальное значение индуктируемой ЭДС, при совпадении оси данной обмотки (1 или 3) с осью обмотки ОВ (рис. 11.2, в).
Изменяя угол поворота ротора сельсина, можно изменять величину управляющего сигнала, подаваемого в схему управления электроприводом, и этим самым управлять работой двигателя (включать, отключать, изменять скорость). Рукоятка бесконтактного командоаппарата имеет ряд положений (фиксированных). Выходное напряжение сельсина составляет 0–10 В, выходной ток – до 0,4 А. Выходное напряжение сельсина через трансформатор Т подается на фазочувствительное выпрямительное устройство ФВУ и после его преобразования – в схему управления.
При использовании сельсина в качестве датчика положения на его ротор воздействует перемещающийся механизм.

Рис. 11.2. Сельсинный командоаппарат:
а – схема; б – статическая характеристика; в – условное обозначение
Датчик скорости используется для контроля угловой скорости двигателей. Наиболее широко в качестве датчиков скорости применяются тахогенераторы постоянного и переменного тока, представляющие собой электрические машины малой мощности, работающие в режиме генератора. Тахогенераторы переменного тока не имеют контактов, что является их достоинством. Различают синхронные и асинхронные тахогенераторы. Синхронные тахогенераторы представляют собой небольшую синхронную машину с ротором в виде постоянного магнита. Выходной величиной такого тахогенератора наряду с ЭДС является и частота.
В электроприводе применяются также импульсные датчики скорости, основанные на модуляции светового потока, направленного от источника излучения через диск с прорезями на фотоприемник. Частота выходного сигнала пропорциональна угловой скорости.
В качестве датчиков тока используются шунты, трансформаторы тока, датчики с использованием эффекта Холла.
Для управления автоматизированным электроприводом широко используются бесконтактные логические элементы.
На рис. 11.3 приведены условные графические обозначения основных бесконтактных логических элементов и эквивалентные им контактные схемы. Входные сигналы обозначены X1, X2, выходной – Y.

Рис. 11.3. Графическое изображение логических элементов
Логический элемент так же, как и обычное реле, может находиться в одном из двух противоположных состояний: «Включено» или «Отключено», что соответствует логическим понятиям «Да» (цифра «1») или «Нет» (цифра «0»).
Элемент И осуществляет логическое умножение (сигнал Y появится при наличии сигналов X1 и X2), элемент ИЛИ – логическое сложение (сигнал Y появится при наличии хотя бы одного сигнала X1 или X2). Элемент НЕ осуществляет логическое отрицание (сигнал на выходе появится лишь при отсутствии сигнала на входе).
Элемент И–НЕ является комбинацией двух логических элементов. Сигнал на выходе исчезнет (Y = 0) лишь при наличии сигналов на обоих входах. Во всех остальных случаях входных сигналов на выходе будет сигнал «1».
Элемент ИЛИ–НЕ характеризуется тем, что сигнал на выходе появится лишь при отсутствии сигналов на обоих входах. При подаче сигнала на любой вход (или на оба входа) сигнал на выходе исчезнет (Y = 0).
Элемент ПАМЯТЬ имеет два входа и характеризуется тем, что при подаче сигнала на первый вход появляется сигнал на выходе, который остается там после снятия сигнала с этого входа, а для снятия сигнала с выхода необходимо подать сигнал на второй вход. На рис. 11.4 элемент ПАМЯТЬ выполнен на триггере Ти элементах ИЛИ–НЕ. При нажатии на кнопку SB1 на первый вход триггера Т подается сигнал «1», который сохраняется и после отпускания кнопки SB1. При нажатии на кнопку SB2 на второй вход триггера Т подается сигнал «1», который обеспечивает переключение триггера и появление на его выходе «0», остающегося также и после отпускания кнопки SB2.
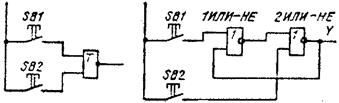
Рис. 11.4. Схема элемента ПАМЯТЬ
Мощность выходных цепей серийных логических элементов не превышает 5 Вт. Поэтому для управления исполнительными устройствами (контакторами, электромагнитами и т.п.) используют промежуточные усилители, входящие в номенклатуру серии логических устройств.
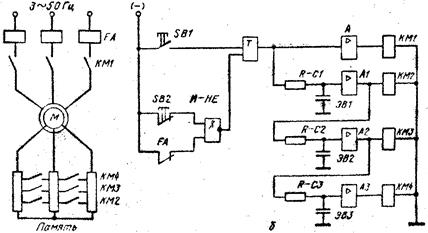
На рис. 11.50 представлена схема пуска асинхронного двигателя с фазным ротором в функции времени с использованием логических элементов. Пуск осуществляется в три ступени. В схеме предусмотрена ячейка ПАМЯТЬ на триггере Т. При нажатии на кнопку SB1 на выходе триггера Т появится сигнал «1» и с помощью усилителя А включится линейный контактор КМ1. Сигнал на выходе триггера Т сохранится и после отпускания кнопки SB1. Сигнал с выхода триггера Т подается одновременно через цепочку R–C1 (задержка времени) и усилитель А1 на контактор ускорения КМ2, который включится с заданной задержкой времени и выведет первую ступень пускового реостата. Затем аналогично включатся с задержками времени (R–C2, R–C3) ускоряющие контакторы КМ3 и КМ4, после чего пуск двигателя будет закончен.
а б
Рис. 11.5. Схема автоматического пуска АД с использованием логических элементов
Отключение двигателя осуществляется либо кнопкой SB2, либо размыкающими контактами максимального реле FA. При этом триггер Тперебрасывается, сигнал на его выходе исчезает, все контакторы отключаются и двигатель останавливается.
Более совершенными являются схемы, выполненные полностью на бесконтактных элементах Вместо контакторов там используются тиристорные или транзисторные выходные элементы, командные элементы также выполняются бесконтактными.
Дата добавления: 2015-12-01; просмотров: 4273;