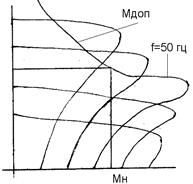
Механические характеристики.
Механические характеристики асинхронного двигателя при частотном регулировании по закону g=a допускают для двигателей более 15 кВ не учитывать активное сопротивление статора.
При этом обеспечивается работа двигателя при постоянстве магнитного потока. При r1=0 и при малых значениях частоты порядка 0,3 от номинальной, падение напряжения на активном сопротивлении статора существенно снижает ЭДС, прикладываемое к контуру намагничивания.

Падение напряжения на Х1 уменьшается с уменьшением частоты и, поэтому не оказывает значительного влияния на величину ЭДС и при малых значениях частоты, когда относительное падение напряжения на r1 станет значительным, поток двигателя уменьшается и уменьшается критический момент. Поэтому для того, чтобы сохранить критический момент для регулирования скорости нужно напряжение на статоре уменьшить в меньшей степени, чем уменьшится частота.

Такой способ регулирования называется регулированием с IR компенсацией Е=const.
При стандартной частоте 50 Гц невозможно получить скорость асинхронного двигателя свыше 3000 об/мин. Однако повышение напряжения, выше стандартного невозможно или затруднено. В этом случае закон изменения частоты не работает и увеличение скорости идет за счет повышения частоты  . При этом намагничивающий ток уменьшается, соответственно падает поток двигателя и максимальный момент снижается обратно-пропорционально квадрату частоты. Но поскольку ток ротора, за счет увеличения скольжения, можно длительно поддерживать равным номинальному, то допустимый момент уменьшается обратно-пропорционально частоте в первой степени.
. При этом намагничивающий ток уменьшается, соответственно падает поток двигателя и максимальный момент снижается обратно-пропорционально квадрату частоты. Но поскольку ток ротора, за счет увеличения скольжения, можно длительно поддерживать равным номинальному, то допустимый момент уменьшается обратно-пропорционально частоте в первой степени.
 , т.е. регулирование идет за счет изменения частоты при постоянной мощности.
, т.е. регулирование идет за счет изменения частоты при постоянной мощности.

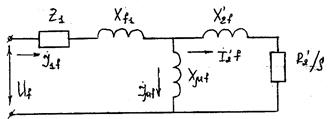
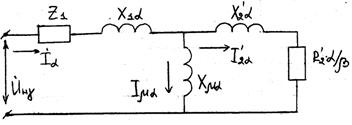
Механическую характеристику можно построить по тем же формулам, что и для включенного двигателя в естественную схему. Но для учета зависимости индуктивного сопротивления от частоты используют Т-образную схему замещения.
 ;
;  ;
;
 и
и  пренебрегаем т.к. разность равна нулю.
пренебрегаем т.к. разность равна нулю.
 .
.
Для анализа характеристик асинхронного двигателя при частоте регулирования для более точного учета падения напряжение и ImZ1 используют Т-образную схему замещения. Расчет производится, используя комплексное выражение, а далее выделяют вещественную часть и получают уточненное выражение для механических характеристик.
 ;
;  ;
;  ;
;
b - абсолютное скольжение;
w1 – скорость идеального холостого хода при заданной частоте f;
w1н – скорость идеального холостого хода при частоте 50 Гц.
 ;
;

 ;
;  ;
;  ;
;
 ;
;
 ;
;  ;
;  ;
;  ;
;  ;
;  ;
;
 .
.
Дата добавления: 2016-02-09; просмотров: 904;