Схематическое изображение систем
Основные понятия, принципы управления, история развития.
Управление – организация процесса, приводящая к достижению указанной цели.
Система – некоторое количество взаимосвязанных элементов, служащих для выполнения общей задачи. Во многих случаях система рассматривается как единое целое.
Автоматическое управление системой – управление системой без участия человека.
Ранее, в теории автоматического управления, простые системы, автоматически регулирующие отдельные параметры принято было называть регуляторами, так как роль автоматического регулирования заключалась в регулировании какого-то одного из выходных параметров систем (скорости вращения вала, давления, температуры, уровня жидкости и т.п.). В дальнейшем, при развитии науки и техники, термин – «регуляторы» стал применяться намного реже, так как, по сути, управление системой заменило регулирование. Управляемые системы стали более сложными, требующими управления несколькими выходными параметрами, поэтому в настоящее время более часто используется термин «системы автоматического регулирования» (САР) или «системы автоматического управления» (САУ), так как данные термины наиболее полно характеризуют суть процессов, происходящих в управляемой системе. В общем случае процесс реагирования системы на внешнее возмущение схематически изображен на рисунке 1.
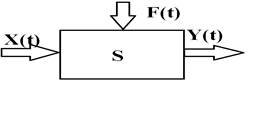
Рис. 1. Схема реагирования системы на возмущение. S – система, X(t) – входной
параметр, F(t) – внешнее возмущающее воздействие, Y(t) – выходной
параметр.
Под воздействием внешнего возмущения F(t) входной параметр X(t) при прохождении через систему изменяется и становится равным Y(t). Указанные значения выражаются через функции времени, так как имеют место в определенный момент времени и изменяются в зависимости от времени. Для того, чтобы на выходе из системы значение Y(t) было управляемым, применяются автоматические регуляторы, которые приводят систему в заданное состояние.
Одними из первых систем автоматического регулирования, знания о которых дошли до нас из истории, принято считать автоматы, описанные Героном Александрийским в его работах «Пневматика» и «Механика». Данные работы относятся к началу нашей эры и
описывают изобретения Герона и его учителя Ктесебия – пневмоавтомат, открывающий двери храма, автомат для продажи «святой воды», водяной орган. В дальнейшем для подъема воды, помола муки человек стал использовать механизмы, которые значительно облегчили указанные процессы, и которые также можно отнести к классу систем автоматического регулирования.
Например, ветряная мельница имела систему ограничения числа оборотов вала, которая не давала разгонять жернова, а также жестко связанные с жерновами лопасти мельницы до критических значений, после которых могло бы последовать разрушение данных механизмов. Это является одним из простых примеров регулирования возмущающего воздействия природных факторов (в данном случае ветра), регулирования их чрезмерного воздействия на систему.
В средние века получила развитие «андроидная» автоматика, названная так из-за сходства с человеком. Изобретатели того времени создали ряд автоматов, подражающих отдельным движениям человека, например, в XIII веке немецким алхимиком Альбертом фон Больштадтом был сконструирован прототип механического человека, открывающий и закрывающий двери.
В XVIII веке русским изобретателем Кулибиным был создан «театр автоматов», который своими размерами не превосходит куриного яйца. Данное изобретение в настоящий момент находится в Эрмитаже и доступно для обозрения. Известны и дорогие игрушки того времени, представляющие собой музыкальные шкатулки с танцующими фигурками.
Развитие промышленности в XVIII веке повлекло за собой необходимость развития автоматики, так с изобретением паровых машин возникла необходимость автоматического регулирования уровня воды в паровых котлах. В 1765 году русским механиком И.Ползуновым был создан первый промышленный регулятор уровня для котла паровой машины. На рисунке 2 изображена схема «регулятора Ползунова».
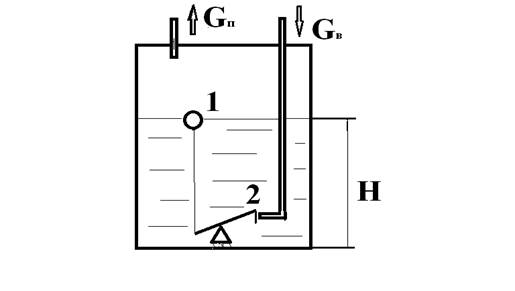
Рис. 2. Схема «регулятора Ползунова». 1 - поплавок, 2 – заслонка, H – уровень воды в
котле, Gп – подача пара из котла, Gв – подача воды в котел.
«Регулятор Ползунова» выполняет задачу по поддержанию в паровом котле постоянного уровня воды. При достижении поплавком 1 заданного уровня H через
систему рычагов заслонка 2 перекрывает трубопровод подачи воды Gв. При падении уровня поплавок 1 опускается и заслонка 2 поднимается, вновь открывая подачу воды. Подача воды будет осуществляться до момента достижения требуемого (заданного) уровня.
В 1784 году Д.Уатт сконструировал регулятор оборотов вала паровой машины, схема которого представлена на рисунке 3. Для того времени изобретение подобного регулятора было прорывом в науке, но ученые того времени считали, что регуляторы не будут существовать, как отдельный класс машин, а будут являться лишь их дополнением. С развитием науки теория автоматического управления стала отдельным разделом науки, изучающим управление в системах. Управление может относиться к различным классам систем.
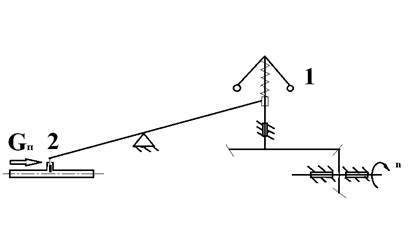
Рис. 3. Схема «регулятора Уатта». 1 - грузики, 2 – заслонка, n – количество оборотов
вала за единицу времени.
При увеличении подачи пара, начинает увеличиваться число оборотов вала, при этом грузики 1 под действием центробежной силы начинают расходиться и через рычаг канал подачи пара Gп перекрывается заслонкой 2. При уменьшении подачи пара с помощью заслонки соответственно уменьшается давление пара и число оборотов вала.
Системы, принцип действия которых показан на регуляторах Ползунова-Уатта получили название систем с обратной связью, т.к. управляющее воздействие задается с помощью учета значений выходных параметров системы.
При развитии техники дальнейшее развитие получило и научное направление по разработке различных регуляторов. Если вначале, при использовании энергии пара в паровых машинах использовались регуляторы Ползунова-Уатта, изобретатели которых являются признанными апологетами теории автоматического регулирования, то с развитием использования электричества, русским электротехником К.Константиновым в 1854 году было предложено использовать для автоматического регулирования скорости вращения вала в паровых машинах электромагнитный регулятор скорости вращения.
В 1866 году А.Шпаковским был разработан регулятор, который регулировал подачу топлива в топку в зависимости от давления пара в котле.
Общая теория регулирования была сформулирована в 1868 – 1876 годах в работах И.Вышнеградского «Об общей теории регуляторов», «О регуляторах непрямого действия», в которых прослеживаются истоки современных методов исследования устойчивости систем регулирования, и их качества регулирования (управления). Примерно в это же время были сформулированы математические критерии устойчивости систем Рауса и Гурвица.
В 1881 году А.Давыдовым была показана первая система с электрическими элементами, класс которых получил впоследствии название «следящих систем». Система Давыдова автоматически придавала артиллерийскому орудию необходимый угол возвышения при изменении задаваемого расстояния до цели.
В 1892 году А.Ляпуновым была опубликована работа «Общая задача устойчивости движения», в которой было дано строгое алгебраическое определение устойчивости, разработаны методы решения задач об устойчивости.
В 1909 году вышла в свет работа Н.Жуковского «Теория регулирования хода машин», которая явилась неоценимым вкладом в развитие теории автоматического управления.
В 1932 году Х.Найквистом была издана книга о частотных способах исследования радиотехнических усилителей, в 1938 году А.Михайловым был предложен гармонический метод в теории регулирования.
В послевоенное время теория автоматического управления получила новый толчок к развитию, появилось много новых направлений в исследованиях и множество ученых, исследовавших и описавших процессы, происходящие в технических системах при автоматическом регулировании. С развитием ядерной энергетики, космонавтики, компьютеризации, теория автоматического управления получила дальнейшее развитие в новых отраслях науки и техники, вплоть до настоящего времени появляются новые работы современных ученых. Создаются автоматизированные системы управления технологическими процессами (АСУТП), производством (АСУП), отраслью (АСУО) и т.д.
Схематическое изображение систем
Схематическое изображение элементов или звеньев системы изображают в виде любых геометрических фигур (чаще прямоугольников), связи между данными звеньями изображаются линиями со стрелками, причем стрелка направлена в сторону направления движения сигнала. Система в общем случае условно разделяется на две части:
1. ОУ – объект управления
2. УУ – управляющее устройство
Взаимодействие указанных частей системы представлено на рисунке 4.
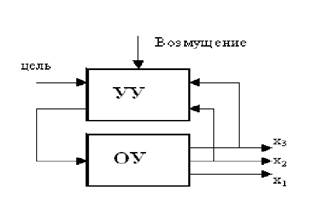
Рис. 4. Схема взаимодействия частей системы.
Х1 – прямые неконтролируемые выходные параметры ОУ
Х2 – прямые контролируемые выходные параметры ОУ
Х3 – косвенные контролируемые выходные параметры ОУ
Выходные параметры системы могут подразделяться на исследуемые и неисследуемые, в свою очередь исследуемые параметры подразделяются на:
- контролируемые параметры,
- неконтролируемые параметры, контроль за которыми может быть затруднен в процессе производства, либо такие выходные параметры имеют значения, которыми в процессе управления системой можно пренебречь.
Нами будут изучаться контролируемые выходные параметры, подразделяющиеся на прямые и косвенные, так как именно от этих параметров зависит устойчивость и качество работы системы.
Прямые выходные параметры описывают непосредственное состояние системы в определенный промежуток времени, косвенные выходные параметры после их измерения могут способствовать более точному регулированию и настройке системы.
Входящие (заданные) параметры, поступающие в управляющее устройство, изменяются с течением времени под действием внешнего возмущения. Задачей автоматического управления является достижение поставленной цели, несмотря на внешнее возмущение, несмотря на меняющиеся параметры состояния системы, возникающие из-за взаимодействия системы с окружающей средой.
Объектами управления могут являться части машин и механизмов, собственно машины и механизмы, производственные линии, технологические процессы, предприятия.
Любой технологический процесс подразумевает под собой совокупность действий, выполняемых по определенным правилам и ограниченный различными критериями.
Процессом управления называется такой процесс действий, который по заданным заранее параметрам приводит к достижению цели.
Целью управления может являться поддержание какого-либо параметра в заданном режиме, т.е. когда контролируемый параметр Xвых = const. Также целью управления может являться изменение выходного параметра системы по заданной программе. В настоящее время программируемые комплексы производят сборку автомобилей, различные технологические операции в агрессивных средах, где непосредственное участие человека небезопасно.
Различают два основных принципа управления: принцип разомкнутого управления и принцип замкнутого управления. Синтез двух указанных принципов дает в результате комбинированное управление.
Принципиальные схемы систем управления могут быть электрическими, пневматическими, гидравлическими, механическими, кинематическими и т.д.
При рассмотрении любого звена системы мы сталкиваемся с рядом физических величин, которые воздействуют на данное звено и называются входными параметрами.
В простом случае звено имеет один входной параметр Xвх. и один выходной параметр Xвых., как изображено на рисунке 5а. В более сложных случаях звено может иметь несколько входных и несколько выходных параметров, причем их число не обязательно должно быть равно друг другу. На рисунке 5б входные параметры изображены, как Xвх1, Xвх2, Xвхm. На выходе данного звена, на рисунке 5б мы имеем выходные параметры Xвых1, Xвых2, Xвыхm, которые характеризуют процессы, протекающие в этом звене.
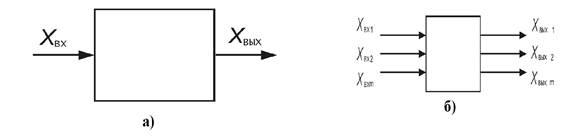
Рис. 5 Параметры звена системы.
а) звено с одним входным и одним выходным параметром
б) звено с множеством входных и выходных параметров
В обычном случае движение сигнала в звене происходит в одном направлении, т.е. входной параметр Xвх. влияет на выходной параметр Xвых., только в системах с обратной
связью выходной параметр Xвых. воздействует на входной параметр Xвх. Структурная схема системы с обратной связью представлена на рисунке 6. Под цифрой 1 на данном рисунке изображено звено, которое может являться сумматором при сложении сигналов, или сравнивающим устройством при вычитании сигналов.
В случае, показанном на рисунке 6, на объект управления (ОУ) поступает управляющий сигнал Xвх., который после прохождения через объект управления принимает значение Xвых. Через обратную связь (ОС) сигнал Xос = Xвх – Xвых поступает на сумматор или сравнивающий элемент, после чего преображается в управляющий сигнал Xвх1, которым задается требуемый параметр управления.
Например, в рассматриваемых в настоящей книге ранее регуляторах Ползунова-Уатта, обратной связью являются рычаги, жестко связанные с заслонками подачи ресурса, которые при увеличении подачи ресурса (воды, пара) регулируют устойчивую работу системы (управляют системой).
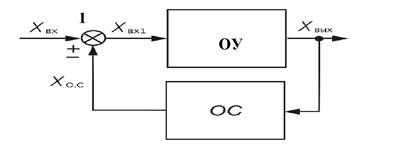
Рис. 6. Схема системы с обратной связью.
ОУ – объект управления, ОС – обратная связь, 1 – сумматор или сравнивающий
элемент, Хвх, Хвх1, Хвых, Хос – входные и выходные параметры
Сумматор или сравнивающий элемент в указанных случаях отсутствуют, т.к. имеет место наличие жесткой обратной связи, а применение вышеуказанных элементов целесообразно при наличии электрических сигналов в управлении системой.
При применении разомкнутого принципа управления на управляющее устройство (УУ) подается входной сигнал X, представляющий собой задание для выполнения поставленной задачи.
Управляющее устройство преобразует входной сигнал X в выходной сигнал U, который в свою очередь подается на объект управления (ОУ). В результате воздействия на объект управления внешнего возмущения Z на выходе объекта управления образуется сигнал Y, который и будет являться решением поставленной задачи. Этот принцип управления является простым для технической реализации, в условиях, когда известны численные характеристики внешнего возмущения, но трудноприменимым, при меняющемся характере возмущения или при стохастическом изменении параметров возмущения.
Структурная схема системы с разомкнутым принципом управления показана на рисунке 7.
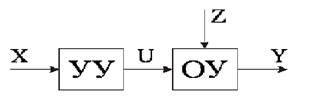
Рис. 7. Структурная схема системы с разомкнутым принципом управления
Принцип компенсации (принцип управления по возмущению) используется в случаях, когда необходимо учитывать характер возмущения при управлении объектом. Структурная схема системы с принципом управления по возмущению изображена на рисунке 8.
При применении принципа компенсации на управляющее устройство (УУ) подается входной сигнал Х, представляющий собой задание для выполнения поставленной задачи. Управляющее устройство преобразует входной сигнал Х в сигнал X1, который подается на корректор (К). Для учета величины параметров внешнего возмущения в структурную схему системы автоматического управления включено устройство, условно называемое - измеритель возмущения (И). Необходимым условием качественного функционирования рассматриваемой системы автоматического управления по принципу разомкнутого управления является наличие заранее известных физических характеристик внешнего возмущения.
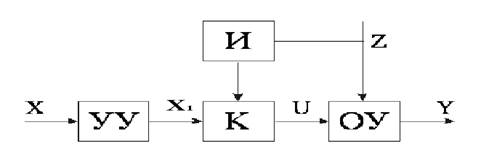
Рис. 8. Схема системы с принципом управления по возмущению.
И – измеритель возмущения, К – корректор,
УУ – управляющее устройство, ОУ – объект управления
В процессе выполнения задачи управления производится замер параметров внешнего возмущения измерителем возмущения (И), сигнал с которого в тот же момент времени поступает на корректор, в результате чего корректором вырабатывается управляющий сигнал U, учитывающий внешнее возмущение. Далее сигнал U подается на вход объекта управления (ОУ). В результате данных операций на выходе объекта управления образуется сигнал Y, который и будет являться решением поставленной задачи. Для того, чтобы принцип компенсации был более эффективен, чем принцип разомкнутого управления необходимо иметь возможность измерения параметров внешнего возмущения, определения характера возмущения.
На основании вышесказанного можно подвести итог, что наиболее удобным в практическом применении является принцип обратной связи, называемый также принципом замкнутого управления, позволяющий учитывать любой характер воздействия внешнего возмущения при решении задачи управления.
Более полная структурная схема системы с принципом замкнутого управления изображена на рисунке 9.
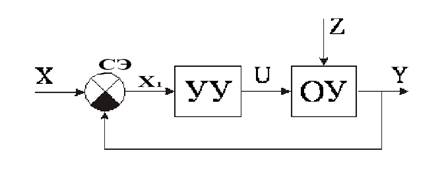
Рис. 9. Схема системы с принципом замкнутого управления.
СЭ – сравнивающий элемент, УУ – управляющее устройство, ОУ – объект
управления
При применении принципа замкнутого управления входной сигнал Х, представляющий собой задание для выполнения поставленной задачи подается на один из входов сравнивающего элемента (СЭ). На другой вход сравнивающего элемента подается по обратной связи значение выходного параметра объекта управления Y. На выходе сравнивающего элемента мы имеем сигнал Х1, представляющий собою разность между сигналами Х и Y, называемый также ошибкой или отклонением между заданным и фактически полученным значением параметров. Управляющий сигнал U вырабатывается управляющим устройством на основании величины и знака отклонения Х1, после чего подается на вход объекта управления с учетом не только задания, но и состояния объекта управления, и величины параметров внешнего возмущения. Исходя из этого, принцип замкнутого управления является наиболее универсальным, несмотря на неопределенность объекта, характера внешнего возмущения и величины параметров возмущения. Примером такого принципа управления является автопилот, который удерживает курс самолета, высоту, скорость, горизонт, в зависимости от заданных параметров (пункта назначения, эшелона), независимо от влажности воздуха, плотности облаков, температуры, скорости и направления ветра и других факторов.
Дата добавления: 2016-02-04; просмотров: 1736;