Пример следящей системы управления углом поворота рабочего механизма
В рассматриваемой системе управляемым параметром является величина угла поворота вала β, рабочего механизма (РМ). Угол поворота вала β равен углу поворота движка потенциометра Пвых, т.к. оба они расположены на исполнительной оси (ИО). Величиной задающего параметра в данном случае является величина угла поворота α движка задающего потенциометра Пвх, находящегося на командной оси (КО). Задача имеющейся системы управления состоит в слежении исполнительной оси за произвольным изменением положения командной оси. Принципиальная схема рассматриваемой следящей системы изображена на рисунке 22.1.
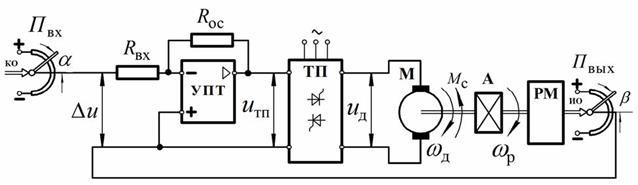
Рис.22.1. Принципиальная схема следящей системы
УПТ – усилитель постоянного тока, ТП – тиристорный преобразователь,
М – двигатель постоянного тока с независимым возбуждением, А – редуктор
При действии момента сопротивления Mc задачу системы можно выразить, как соблюдение равенства углов:
β (t) = α (t) (1.13.1.)
Тогда сигнал рассогласования будет определен выражением:
Δu(t) = uα (t) − uβ (t) = kп [α (t) −β (t)] = kпΔ(t) (1.13.2.)
uα, uβ – выходные напряжения потенциометров, kп – их передаточный коэффициент.
В результате усиления сигнала Δu(t)в усилителе постоянного тока (УПТ) и преобразовании его в тиристорном преобразователе (ТП), сигнал поступает на обмотку двигателя (М). Величина поступившего на обмотку сигнала uд(t) будет зависеть от величины сигнала рассогласования Δu(t)передаточных коэффициентов УПТ и ТП, и примет следующий вид:
uд (t) = kуптkтпΔu(t) = kуптkтпkпΔ(t) (1.13.3.)
Выходным параметром двигателя (М) будет скорость его вала ωд, поступающая на редуктор (А), а входным параметром рабочего механизма (РМ) – скорость ωр выходного вала редуктора. Структурная схема следящей системы изображена на рисунке 22.2.
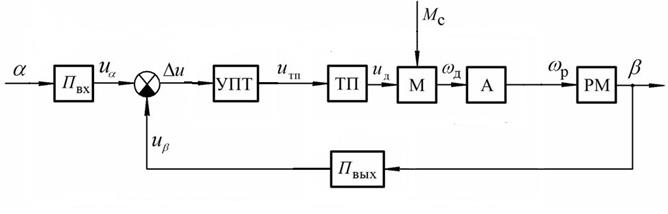
Рис.22.2. Структурная схема следящей системы
При одинаковых положениях движков потенциометров Пвх и Пвых, угол рассогласования между ними будет равен нулю, поэтому система будет находиться в покое. При изменении угла рассогласования преобразованный сигнал через звенья системы будет поступать на обмотку двигателя, стараясь привести угол рассогласования к нулю и выполняя задачу управления, для данного случая:
Δ = α −β = 0 (1.13.4.)
Поворот командной оси в противоположную сторону изменит полярность сигнала, и, соответственно, заставит двигатель повернуть вал в обратную сторону.
Общие положения моделирования объектов управления.
Дата добавления: 2016-02-04; просмотров: 1014;