Судовыми генераторными агрегатами серии Multi-Line 2
Программируемые многофункциональные контроллеры серии Multi-Line 2 выпускаются фирмой DEIF в трех модификациях:
GPU (Generator Protection Unit) – блок зашиты генератора;
GPC (Generator Paralleling Controller) – блок обеспечения параллельной работы генераторов;
PPU (Paralleling Protection Unit) – блок защиты и обеспечения параллельной работы генераторов.
Все контроллеры реализованы в виде отдельного компактного блока в унифицированном корпусе (120 × 230 × 165 мм) с выносной панелью управления (115 × 220 × 20 мм), которая устанавливается на лицевой панели главного распределительного щита (ГРЩ).
Контроллеры предназначены для обеспечения работы генераторов в следующих режимах:
– одиночная работа;
– параллельная работа с другими генераторами;
– параллельная работа с сетью большой мощности.
Контроллеры программируются либо с панели управления, либо путем подключения компьютера (RS232 – интерфейс) с использованием специального программного обеспечения (ПО) для Windows. Это ПО позволяет выводить на дисплей компьютера текущие значения параметров генератора, изменять уставки контролируемых параметров и таймеров, обновлять встроенное программное обеспечение блока.
Предусмотрена возможность использования блоков для их совместной работы с контроллерами программируемой логики (ПЛК) серии Uni-Line фирмы DEIF. Для этого могут использоваться как дискретные и аналоговые входы/выходы, так и подключение посредством последовательного интерфейса.
Блок СР11 предназначен для выполнения следующих функций: защита генератора – от обратной мощности, от перегрузки по току (два уровня), от перегрузки по мощности (два уровня), от асимметрии напряжений, от разности тока в фазах, генерирования/потребления реактивной мощности (потеря возбуждения); защита при неисправностях сети – от перенапряжения (два уровня), от низкого напряжения (два уровня), от превышения/ понижения частоты (по два уровня); защита от броска вектора напряжения, от разноса (df/dt).
Блок ОРС выполняет следующие функции: защита генератора: от обратной мощности, от перегрузки по току (два уровня); защита при неисправностях сети – от перенапряжения (два уровня), от низкого напряжения (два уровня), от превышения/ понижения частоты (по два уровня); защита от броска вектора напряжения, от разноса (df/dt).
По сравнению с блоком GPU в блоке GPC отсутствуют следующие функции защиты генераторов: от перегрузки по мощности (два уровня), от асимметрии напряжений, от разности тока в фазах, от генерирования/потребления реактивной мощности (потеря возбуждения).
В блоке GPC реализовано четыре режима управления мощностью и частотой:
– фиксированная частота и напряжение (одиночная работа);
– фиксированная активная/реактивная мощность (параллельная работа с сетью большой мощности);
– распределение активной/реактивной мощности (параллельная работа генераторов);
– управляемое уменьшение частоты с увеличением нагрузки (статизм).
Выбор необходимого режима производится подачей положительного напряжения на соответствующие входы блока, либо посредством последовательного интерфейса.
Блок выполняет программируемое плавное (линейное) снижение/увеличение мощности на генераторе при отключении/подключении к сети.
Для обеспечения динамической синхронизации с сетью блок выполняет следующие функции:
– контроль частоты с программируемой уставкой частоты скольжения;
– регулирование напряжения генератора;
– формирование сигнала на включение автомата генератора с учетом задержки на замыкание его контактов, задержка регулируется программно;
– подключение генератора к обесточенным шинам.
Блок PPU реализует все функции защиты генератора и сети блока ОР11, а также обеспечивает выполнение режимов работы и функции синхронизации генератора, предусмотренные в блоке СРС.
Для выполнения перечисленных функций каждый из контроллеров (блоков) измеряет и вычисляет следующие параметры:
– для генератора:
напряжение трех фаз;
токи трех фаз;
активную и реактивную мощности;
коэффициент мощности;
частоту;
количество произведенной электроэнергии;
– для шин:
линейное напряжение; частота.
Особенности функционирования и программирования контроллеров серии Multi-Line 2 рассматриваются на примере блока защиты и параллельной работы генераторов РРU, так как в нем реализованы функции защиты (блок GPU) и управления генераторами (GPC).
После пуска ДГ, с подачей сигнала на вход блока <<Start sync./contr>>, РРU начинает процесс синхронизации и приводит частоту вращения ДГ в соответствие с частотой сети, с учетом допустимой разности частот (скольжения), которая задается программно.
С учетом времени срабатывания автомата и частоты скольжения формируется сигнал на включение автомата.
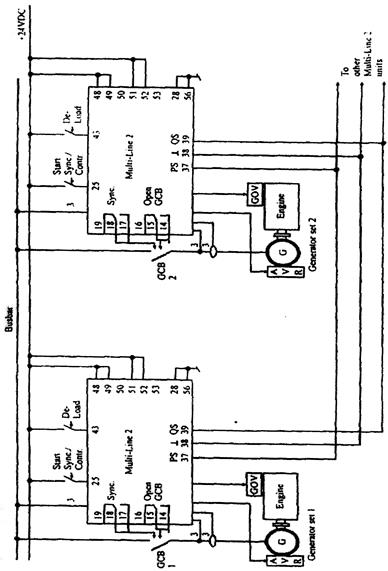
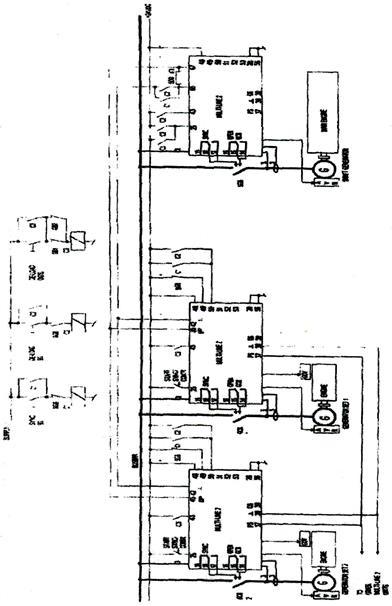
После того, как включен автомат, Multi-Line 2 работает в режиме распределения активной и реактивной мощности. Распределение мощности производится пропорционально номинальной мощности генераторов, работающих параллельно. Если на шины включен только один ДГ, то используется режим фиксированной частоты напряжения сети. Схема подключения РРП для обеспечения параллельной работы генераторов представлена на рис. 130.
При нажатии кнопки<<Deload>>, блок перестает контролировать распределение нагрузки и производит разгрузку генератора. При снижении мощности на генераторе ниже 5% (уставка программируется), формируется сигнал на выключение генераторного автомата.
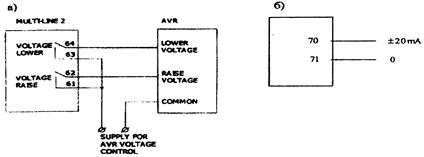
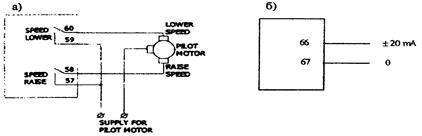
В соответствии с типом применяемого регулятора дизеля и автоматического регулятора напряжения (AVR), для управления ими используются либо релейные, либо аналоговые выходы блока РРU (рис. 131, 132).
Блок РРU может использоваться не только для синхронизации и обеспечения параллельной работы ДГ, но и для синхронизации секций шин «А» и «В» главного распределительного щита.
В этом случае дополнительно используется блок DEIF типа HAS-111DG для синхронизации секций шин между собой. Блок HAS-111DG, контролируя разность частот между секциями шин, осуществляет управление частотой вращения генераторов на стороне «А» посредством блока Multi-Line 2. Схема подключения блоков РРU для этого случая представлена на рис. 132.
Аналоговый сигнал с выхода блока НА8-11ШО имеет диапазон (–5 ... 0 ... 5) В. При равенстве частот на синхронизируемых секциях шин аналоговый сигнал равен нулю, –5 В – при отставании частоты на 2,5 Гц, 5 В – при опережении частоты на 2,5 Гц.
| Рис. 130. Подключение PPU для обеспечения синхронизации и распределения активной/реактивной мощности двух и более генераторных агрегатов |
|
Рис. 131. Подключение релейного (а)
и аналогового (б) регуляторов напряжений генератора к PPU
|
Рис. 132. Подключение механического (а)
и электронного (б) регуляторов частоты вращения дизеля к PPU
Необходимо отметить, что соответствующие выходы HAS-111DG и входы Multi-Line 2 включены «крест-накрест» таким образом что если на выходе блока HAS-111DG формируется сигнал уменьшения частоты (отрицательное напряжение), то на входе блока Multi-Line 2 должен быть сигнал увеличения частоты вращения ДГ (положительное напряжение).
Для выполнения синхронизации секций шины блоки РРU на стороне «А» должны быть установлены в режим задания частоты от внешнего устройства. Это достигается подачей напряжения +24 В на вход 50 этих блоков. Диапазон входного сигнала (–10 ... 0 ... 10) В DС соответствует изменению частоты в пределах f ± 5 Гц.
Реле С1 (см. рис. 133) используется для запуска процесса синхронизации и находится под питанием до срабатывания секционного автомата, вспомогательными контактами которого размыкается его цепь питания.
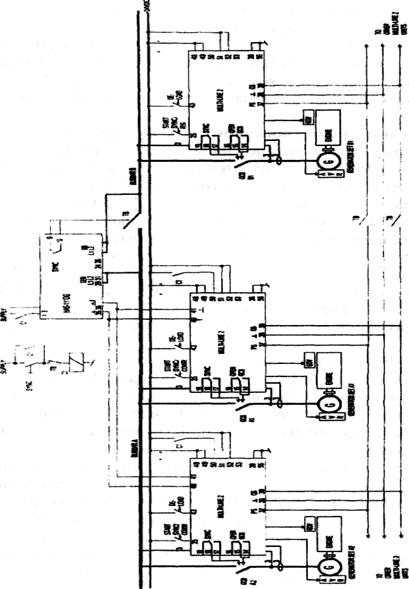
| Рис. 133. Схема подключения блоков PPU и HAS-111 DG для синхронизации секций шин главного распределительного щита |
Два других вспомогательных контакта секционного автомата используются для замыкания/размыкания цепей распределения активной и реактивной мощности между секциями «А» и «В» шин ГРЩ.
Контроллер РРU может также использоваться для управления валогенератором с винтом фиксированного шага. Поскольку частота вращения приводного двигателя не регулируется, то допустимое время параллельной работы ВГ и ДГ определяется одной минутой, в течение которой выполняется перевод нагрузки на валогенератор и обратно без бросков тока.
Для перевода нагрузки с ДГ на валогенератор и наоборот используется сигнал с аналогового выхода (66, 67) блока управления ВГ. Этот сигнал поступает на входы (40, 41) задания частоты блоков управления ДГ. Для согласования выходного токового и входных потенциальных сигналов используется сопротивление 500 Ом, включенное параллельно выходу блока управления. Схема включения контроллеров РРU для организации параллельной работы ВГ и дизельгенераторов представлена на рис. 134.
При нажатии кнопки <<Sync.SG>> срабатывает реле С1 и остается в этом состоянии до включения автоматического выключателя валогенератора. Контактами С1 замыкаются следующие цепи:
– <<Start sync./contr>> (вход 25) блока управления валогенератора;
– аналоговый выход управления регулятором валогенератора (выход 66 – «+», 67 – общий) подключается к входу задания частоты/мощности блока ДГ (вход 40 – «+», 41 – общий), соединение делается «крест-накрест» для инвертирования управляющего сигнала;
– цепь задания частоты/мощности ДГ от внешнего источника (вход 50).
Поскольку на входы 48 и 49 подается положительное напряжение, то ДГ работает в режиме распределения нагрузки; необходимым для этого условием является активизация входа <<Start sync./contr.>>блока ДГ.
После срабатывания автомата ВГ снимается питание с реле С1, что вызывает исчезновение положительного напряжения с входа 49 блока ДГ, в результате чего ДГ переводится в режим фиксированной (постоянства) мощности.
| Рис. 134. Схема организации параллельной работы валогенератора с дизель-генераторами при использовании контроллеров Multi-Linе типа PPU |
При нажатии кнопки «Deload SG» срабатывает реле С2 и остается в этом положении до момента выключения автомата ВГ. Контактами С2 активируются следующие цепи:
– «Start sync./contr» (вход 25) и <<Deload>> (вход 43);
– аналоговый выход управления регулятором ВГ подключается к входу задания частоты/мощности ДГ, подключение осуществляется «крест-накрест» для инвертирования управляющего сигнала;
– цепь задания частоты/мощности ДГ от внешнего устройства (вход 50).
В этом случае ДГ работают в режиме фиксированной мощности (+24 В на входе 48), которая задается блоком ВГ, вход блоков ДГ «81аг1 8упс./соп1г.» должен быть активирован.
Выключение автомата ВГ приводит к снятию напряжения с реле С2 и появлению сигнала +24 В на клеммах 49 блоков ДГ. В результате ДГ переводится в режим распределения нагрузки.
Для того, чтобы избежать повторной синхронизации ВГ с шинами, размыкается цепь подачи напряжения на клемму 25 <<Start sync./contr>>.
При нажатии кнопки «Deload DG’S» срабатывает реле СЗ. Это приводит к началу процесса разгрузки ДГ. Дизель-генератор переводится в режим фиксированной мощности.
Повторная синхронизация отключенного генератора невозможна до тех пор, пока на вход блока 43 («Deload») подается положительное напряжение. Для того, чтобы избежать повторной синхронизации отключенного генератора после снятия напряжения с входа «Deload», необходимо также снять напряжение с входа 25 «Start sync./contr.».
Организация параллельной работы ДГ с сетью большой мощности (питание с берега) очень похожа на работу с ВГ, так как в этом случае также невозможно управлять частотой и напряжением сети.
При работе с сетью большой мощности необходимо использовать управление генератором по напряжению (управление АPH), иначе невозможно осуществлять распределение реактивной мощности ДГ, что может привести к его перегрузке по току.
Для управления напряжением и частотой ДГ используются аналоговые сигналы, формируемые блоком Multi-Line 2, управляющим автоматом питания с берега (рис. 135). Выход 67 блока управления сетью подключается ко входу 40 задания частоты/активной мощности
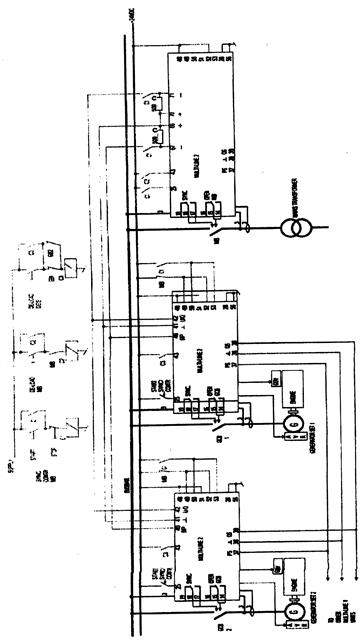
| Рис. 135. Схема организации параллельной работы дизель-генераторов с сетью бесконечной мощности при использовании блока PPU |
блока управления ДГ, выход 71 – к входу 42 задания напряжения/реактивной мощности, выходы 66, 67 и вход 41 объединяются (общий). Для согласования выходных и входных сигналов (ток и напряжение соответственно) используется параллельное включение сопротивления 500 Ом. Таким образом осуществляются следующие виды управления ДГ: регулирование частоты и напряжения при синхронизации; распределение активной и реактивной мощностей при параллельной работе.
При нажатии на кнопку «Start sync./contr. МВ» срабатывает реле С1, что приводит к следующему:
– включается в работу блок Multi-Line 2, управляющий автоматом подключения к берегу (МВ);
– аналоговые выходы управления регулятором частоты вращения ДГ (GOV) и регулятором напряжения (АVК.) этого блока подключаются ко входам задания частоты/мощности и напряжения/реактивной мощности блоков ДГ; собирается цепь задания мощности/частоты, напряжения ДГ от внешнего устройства (на контакты 43 и 25 подается напряжение 24 В).
Таким образом ДГ работают в режиме распределения мощности.
При срабатывании автомата питания с берега его вспомогательными контактами ДГ переводятся в режим фиксированной активной/реактивной мощности с заданием значений от внешнего устройства, для чего используются уставки блока, управляющего автоматом подключения к берегу. Сеть дизель-генераторов работает параллельно с сетью большой мощности.
При необходимости ручного задания мощности/коэффициента мощности необходимо подать напряжение +24 В на входы 50 и 53. Для задания требуемых значений используются входы 42,41 – «+» и 40 – «–».
Для перевода нагрузки с береговой сети на ДГ необходимо нажать кнопку «Deload МВ», что приводит к срабатыванию реле С2, которое остается в замкнутом положении до конца процесса. Его контактами активируется вход 43 «Deload» блока управления автоматом питания с берега, в результате чего на его выходе формируется сигнал разгрузки, который поступает на входы задания мощности/частоты блоков управления ДГ. Благодаря подключению «крест-накрест» происходит увеличение нагрузки на ДГ. Отключение автомата питания с берега производится в момент, когда нагрузка на нем соответствует 5% от заданной в его блоке уставки.
Для активизации процесса разгрузки ДГ необходимо нажать на кнопку «Deload DG’S», в результате чего срабатывает реле СЗ и остается в этом положении до тех пор, пока замкнут хотя бы один из автоматов ДГ.
Функция защиты от бросков вектора напряжения при работе генератора с сетью большой мощности реализуется путем сравнения образцовой синусоиды и реальной. При незначительных колебаниях частоты сети блок контроля синхронизирует образцовую синусоиду с реальной. Образцовая синусоида следует за реальной с максимальным ускорением нулевой точки (момент перехода мгновенного значения напряжения с отрицательного на положительное) 0,01 мс (10 °/с), то есть максимально допустимое ускорение вектора напряжения сети также равно 10%.
В случае, если изменения частоты сети более значительны, чем 10 °/с, растет угол между нулевыми точками реального и образцового напряжений. Как только эта разность превышает допустимое значение, срабатывает защита (МB отключается). Блоки ДГ переводятся в режим разгрузки своих генераторов. После разгрузки до 5% производится отключение генераторных автоматов.
Для предотвращения повторной синхронизации отключенных ДГ необходимо снять напряжение с входов «Start sync./contr.» (входа 25) блоков контроля ДГ.
Функция контроля броска вектора напряжения включается через 3 с после замыкания контактов автомата МВ. Максимально допустимое значение угла рассогласования устанавливается программно.
При работе генераторов параллельно с сетью большой мощности в случае исчезновения напряжения непосредственно в сети может произойти увеличение или снижение частоты генератора. Это приводит к необходимости защиты генератора при внезапном восстановлении напряжения в сети из-за возможности его несинхронного включения. Защита срабатывает в случае достижения ускорением изменения частоты недопустимого значения и продолжения этого состояния в течение пяти периодов напряжения. Значения недопустимых ускорений/замедлений изменения частоты сети устанавливаются программно.
Дата добавления: 2016-02-02; просмотров: 2517;