На параллельную работу
Перед включением синхронного генератора на параллельную работу с шинами СЭС напряжения генератора и на шинах при равенстве амплитудных значений имеют частоты и начальные фазы, несколько отличающиеся друг от друга. Это является причиной появления так называемого напряжения биения. В § 17 уже анализировалась эта величина, здесь же следует обратить внимание на то, что огибающая амплитудных значений напряжения биения выражается уравнением
 , ,
| (126) |
где Um – амплитудное значение напряжения генератора и на шинах;
ωг, ωш, ωs – угловые частоты напряжений соответственно генератора, на шинах и биения; при этом ωs = ωг – ωш;
φг, φш – начальные фазы напряжений соответственно генератора и на шинах.
Эта огибающая, а также и напряжения биения представлены на рис. 108.

|
Рис. 108. К пояснению принципа автоматической синхронизации
при постоянном угле опережения
Как уже обращалось внимание, оптимальным моментом включения генератора на шины является момент равенства нулю напряжения биения. Однако из-за того, что для срабатывания аппаратуры, производящей включение генератора, требуется определенное время tср, команду на включение следует подавать несколько раньше, с некоторым опережением toп,с тем чтобы к моменту включения генератора напряжение биения уменьшилось до нуля, при этом tоп = tср.
Автоматическая синхронизация осуществляется при условии обеспечения либо постоянного угла, либо постоянного времени опережения. При использовании первого принципа датчик настраивается на определенное значение напряжения биения, зависящее от угла опережения:
 , ,
| (127) |
где δs – угол сдвига фаз между ЭДС генератора и напряжением на шинах;
δоп = p – δs /2 – угол опережения.
Угол опережения зависит от времени подачи команды:
δоп = ωstоп /2.
Так как в это выражение входит угловая частота скольжения (или биения), то автоматическая система синхронизации, настроенная при угловой частоте ωsl при других значениях частоты биений, не обеспечит оптимальных условий для включения синхронного генератора.
На рис. 108 показано, что при одном и том же угле опережения δоп = const время опережения toпзависит от угловой частоты биений ωs.
Если система настроена на работу при частоте ωs1 = 2π/Тs1 (где Tsl– период биений), то время опережения равно времени срабатывания tоп1 = tcp.
При увеличении частоты ωs3 > ωs1 время опережения уменьшается (tоп2< tоп1)и срабатывание аппаратуры будет происходить с запаздыванием, то есть tоп3> toп2,после того как напряжение биений, пройдя нулевое значение, начнет увеличиваться.
При уменьшении частоты ωs3 < ωs1 время опережения увеличивается и срабатывание аппаратуры будет происходить раньше оптимального момента времени, то есть tоп3 > tоп1.
Из сказанного вытекает, что принцип постоянства угла опережения не обеспечивает слежения за значением частоты биения, и генератор может быть подключен к шинам в момент времени, когда Us = 0, только при одной вполне определенной и заданной при настройке частоте биений. Это приводит к тому, что данный принцип автоматизации может применяться при небольшом диапазоне частот скольжения. Применение этого принципа позволяет использовать достаточно простые схемные решения, но процесс синхронизации из-за малого диапазона частот несколько затягивается во времени.
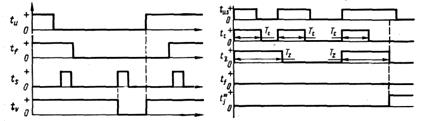
Принцип постоянства времени опережения устраняет указанные недостатки, хотя и требует существенного усложнения схемы. Действительно, при сохранении неизменности времени опережения (tоп = tср – const) с изменением частоты биений изменяются, как это видно из рис. 109, угол опережения и значение напряжения биения Us,при которых должна быть подана команда на включение генератора.
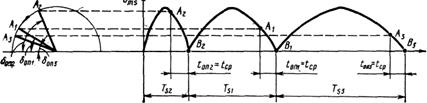
Рис. 109. К пояснению принципа автоматической синхронизации
при постоянном времени опережения
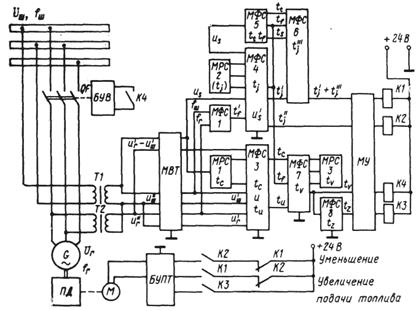
На рис. 110 приведена схема автоматической синхронизации и включения генераторов на параллельную работу, используемая на пассажирских теплоходах (проект № 092-16). Система автоматической точной синхронизации, работающая с постоянным временем опережения, конструктивно выполнена в виде модулей различного назначения, соединенных между собой линиями электрической связи. Система синхронизации получает питание от шин электростанции через блок питания и от сети постоянного тока напряжением 24 В.
|
Рис. 110. Схема автоматической точной синхронизации и включения генератора
на параллельную работу
На модуль МВТ входных трансформаторов через разделительные трансформаторы Т1 и Т2 подаются напряжения с шин u'ш, с выводов включаемого генератора и'г, а также их разность и'г – и'ш.После обработки этих напряжений на выходах этого модуля появляются сигналы напряжения иг'' и и"ш,сигналы биения us, а также сигналы частоты fг и fш.
Сигналы напряжения и''ги и''шпоступают на вход модуля МФСЗ, где формируются сигналы возможности синхронизации tcи допустимой разности напряжений tu.
Сигнал tсимеет прямоугольную форму, неизменную продолжительность и период, равный периоду сигналов биения. Время опережения можно регулировать с помощью регулятора, установленного на модуле МРС1 регулирования сигнала.
Сигнал допустимой разности напряжений равен нулю, когда разность напряжений генератора и на шинах не превышает допустимое значение Δuдоп, то есть tu = 0 при
 . .
| (128) |
Если же разность напряжений больше допускаемой Δuдоп, сигнал имеет определенное положительное значение tu > 0 при Δu > Δuдоп.
Сигналы частоты на шинах fш и генератора fг поступают от модуля МВТ на модуль МФС1 формирования сигнала соотношения частот ft который передается на вход модуля МФС4. Сигнал Ц равен нулю в тех случаях, когда частота генератора меньше частоты на шинах и больше нуля при обратном соотношении:
| t'f = 0 при fг < fш; t'f > 0 при fг > fш. | (129) |
В зависимости or значения сигнала Ц (0 или > 0) в модуле МФС4 вырабатываются сигналы Ц на увеличение и Ц на уменьшение подачи топлива, которые после усиления поступают на катушки соответственно контакторов К1 и К2. В результате срабатывания контакторов К1 или К2 получает питание серводвигатель М регулятора топливного насоса и изменяется подача топлива с целью уменьшения разности частот. Предусмотрена возможность регулирования сигналов tj с помощью регулятора на модуле МФС2.
Сигнал биения us в модуле МФС4 преобразуется в сигнал прямоугольной формы, имеющий продолжительность, пропорциональную периоду биений Тs. В свою очередь сигнал u's подается на вход модуля МФС5, где происходит формирование сигналов: tf – допустимой разности частот; tt – выдержки времени и tus – биения.
Сигнал допустимой разности частот принимает нулевое значение, когда абсолютное значение разности частот находится в допустимых пределах:
| tf = 0 при Δ f = | fг – fш | ≤ Δ fдоп; tf > 0 при Δ f = | fг – fш | > Δ fдоп. | (130) |
Сигналы tt и tus имеют прямоугольную форму и период, равный периоду биений. Однако сигнал tt имеет постоянную продолжительность, а продолжительность сигнала tua пропорциональна периоду биений.
Сигналы tc, tf и tu поступают в модуль МФС7, где формируется сигнал tv на включение автоматического выключателя QF (рис. 111). Сигнал tv можно регулировать с помощью потенциометра, установленного на модуле МРСЗ.
Выключатель QF (см. рис. 110) включается при замыкании контакта К4 в цепи его блока управления БУВ, для чего необходимо подать питание на катушку реле К4. Так как один из выводов катушки присоединен к выводу +24 В источника, то для срабатывания реле К4 необходимо присоединить другой вывод его катушки к корпусу, с которым также соединен второй вывод источника питания. Такое соединение катушки будет при tv = 0, а это имеет место при выполнении следующих условий: tt – 0, tu = 0, ts = 1, то есть разности частот и напряжений находятся в допустимых пределах и обеспечено необходимое время опережения ts > 0.
Особенностью рассматриваемой системы синхронизации является наличие модуля МФС6, где вырабатывается дополнительный сигнал t''j' на подачу топлива (рис. 112) в тех случаях, когда частоты
| |
| Рис. 111. Схема формирования сигнала tv на включение автоматического выключателя | Рис. 112. Схема формирования сигнала на дополнительную подачу топлива |
генератора и на шинах равны, а разность их напряжений превышает допускаемое значение из-за наличия сдвига фаз между ними:
 , ,
| (131) |
Это выражение получается при подстановке в формулу (126) значения ωs = 0.
Дополнительная подача топлива приводному двигателю дизель-генератора обеспечивает поворот вектора его напряжения относительно вектора напряжения шин, и разность значения напряжений уменьшается (см. рис. 109).
Дата добавления: 2016-02-02; просмотров: 1932;