ПРИМЕР КИНЕМАТИЧЕСКОГО АНАЛИЗА РЫЧАЖНОГО МЕХАНИЗМА КАЧАЮЩЕГОСЯ ТРАНСПОРТЕРА.
Заданы: схема механизма (рис.2.1), длины всех звеньев (lАВ,lВС,lСД,lСЕ) и расстояние между осями A и D (lАД), положение центров тяжести звеньев (точек S1 , S2 , S3 , S4 , S5). Начальным звеном является кривошип 1, который вращается с постоянной угловой скоростью w1.
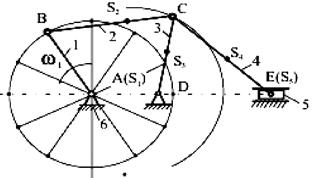
Рисунок 2.1 - план механизма
Решение
1. Проводим структурный анализ механизма.
Структурный анализ этого механизма проведен выше:
степень подвижности мханизма W=1;
структурная формула 1кл (1,6) → 2 кл (2,3) →2кл (4,5).
2. Определяем положения звеньев механизма с помощью построения плана механизма.
План начинаем строить с изображения начального звена, имеющего действительную длину lАВ, соответствующим отрезком AB. После этого определяем масштабный коэффициент длины Кl = lАВ /(AB), м/мм.
Находим длины остальных отрезков в миллиметрах:
BC=lВС/Кl, CD=lСД /Kl, CE=lСЕ/Kl, AD=lАД/Kl.
Изображаем неподвижные элементы в точках А и D осей вращения звеньев 1 и 3, проводим траекторию движения точки E ползуна - горизонтальную линию, проходящую через точки A и D. Далее радиусом AB проводим окружность, представляющую собой траекторию точки B. Делим эту окружность на двенадцать равных частей. Соединив все двенадцать точек на окружности с центром вращения А, получим двенадцать положений кривошипа АВ. Положения точек С и E, соответствующие положениям точки В, находим методом засечек.
При нумерации положений кривошипа (механизма) за нулевое принимаем положение, при котором ползун 5 будет находиться в одном из крайних положений (либо в правом, либо в левом). Далее нумерацию положений производим в направлении вращения кривошипа 1 (на схеме показано круговой стрелкой).
3. Строим план скоростей (рис. 2.2).
Для начального механизма 1 класса определяем скорость точки В:
VB=ω1 ∙lАВ, м/с.
Вектор этой скорости перпендикулярен звену АВ и направлен в сторону его вращения.
Скорость VВ изображаем на плане скоростей произвольным отрезком Pb. После этого определяем масштабный коэффициент скорости:
KV=VB/PB, м/c ∙мм.
Затем определяем скорость точки С двухпроводковой группы Ассура (2,3). Рассматривая движение точки С по отношению к точкам В и D, записываем соответственно два векторных уравнения:
VC = VB + VBC
VC = VD + VCD
где VD = 0; VСВ ┴ CB; VCD ┴ CD.
Решаем эти уравнения графически. Согласно первому уравнению, через точку в плана скоростей проводим прямую перпендикулярно к звену CВ, а согласно второму уравнению, через точку Р (так как VD = 0, и точка d находится в полюсе) проводим прямую перпендикулярно СD. На пересечении этих перпендикуляров отмечаем точку с, которая является концом вектора Pc , изображающего абсолютную скорость точки С.
Рассматриваем группу Ассура (4,5). В этой группе определяем скорость точки Е. Рассматривая движение точки Е сначала по отношению к точке С, а затем по отношению к направляющей ползуна 5, запишем векторные уравнения:
VE = VC + VEC,
VE = VE0 + VEE0,
где Ео - точка на оси движения ползуна 5;
VE0 = 0, так как направляющая неподвижна;
CE┴VEC и VEE0 оси движения ползуна.
Решаем эти уравнения графически. Через точку с плана скоростей проводим прямую, перпендикулярно к звену ЕС, а через полюс Р (так как VE0 = 0 , и точка е0 находится в полюсе) - прямую, параллельную траектории движения ползуна 5 (горизонтальная линия).
После определения положений точек, а, b, с, d, e наносим на соответствующих отрезках плана скоростей точки центров тяжести звеньев (S1, S2, S3, S4) в соответствии с заданными координатами, используя теорему подобия. Если, например, точка S2 находится на середине звена ВС на плане механизма, то и на плане скоростей эта точка будет находиться также на середине отрезка bc. Аналогично находятся на плане скоростей и остальные точки центров тяжести звеньев.
Используя построенный план, находим величины скоростей:
VB = Pb∙KV, м/c; VC = Pc ∙Kv, м/c; VCB = cb∙ Kv, м/c;
VE = Pe∙KV ,м/c; VS2 = PS2∙ Kv ,м/c; VS3 = PS3∙Kv ,м/c .
Находим угловые скорости ω2, ω3, ω4 звеньев 2, 3 и 4:
ω2 = VCB/lCB, рад/с; ω3 = VCD/lCD, рад/с; ω4 = VEC/lEC, рад/с.
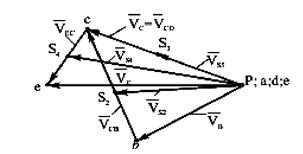
Рисунок 2.2 – план скоростей
Направления угловых скоростей определяем по направлениям относительных скоростей. Например, для определения направления вектор скорости VСВ плана скоростей переносим в точку C плана механизма и рассматриваем движение точки C по отношению к точке В в направлении скорости VСВ. Направление будет совпадать с направлением движения точки C в данный момент. Аналогично определяем направления угловых скоростей w3 и w4.
4. Строим план ускорений (рис.2.3).
Определение ускорений, как и скоростей, ведем в порядке, определяемом структурной формулой механизма.
Для начального механизма первого класса определяем ускорение точки В, совершающей равномерное движение по окружности радиуса lАВ : аВ = ω2∙lАВ ,м/c2.
Так как ускорение точки В состоит только из нормального (ω1 = const,
ε1 = 0), то вектор b ускорения aВ проводим из полюса параллельно звену АВ в направлении от точки В к точке А.
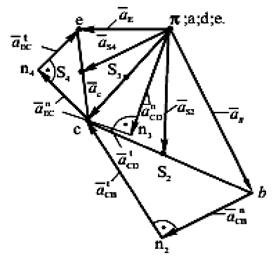
Рисунок 2.3 – план ускорений
После этого определяем масштабный коэффициент ускорения:
Kа = аВ/πb, м/с2·мм.
Затем переходим к определению ускорения точки С в группе Ассура (2,3). Рассматриваем движение точки. Cначала по отношению к точке В (относительное движение звена 2-вращательное вокруг точки В), а затем по отношению к точке D (относительное движение звена 3-вращательное вокруг точки D). Записываем соответственно два векторных уравнения:
 +
+ 

Ускорения aВ и aД точек В и D известны: aD определено выше,
aД = 0 . Величины нормальных ускорений вычисляем по формулам:
.. 
Вектор  направляем параллельно СВ в направлении от точки С к точке В, а вектор
направляем параллельно СВ в направлении от точки С к точке В, а вектор  -параллельно CD в направлении от точки С к точке D.
-параллельно CD в направлении от точки С к точке D.
У векторов тангенциальных ускорений известны только направления, они направлены перпендикулярно нормальным составляющим ускорений. Вектор полного ускорения aС и величины тангенциальных ускорений определяются построением плана ускорений. Теперь решаем записанные выше векторные уравнения графически. В соответствии с первым уравнением из точки b откладываем отрезок bn2, изображающий нормальное ускорение . Длина отрезка определяется следующим образом: делим отрезок нормальной составляющей, измеренной с плана ускорений в миллиметрах на масштабный коэффициент плана ускорений. Отрезок bn2 проводим параллельно звену СВ в направлении от точки С к точке В. Далее через точку n2 проводим перпендикулярно к СВ направление (линию действия) вектора тангенциальной составляющей ускорения .
В соответствии со вторым векторным уравнением из полюса π (так как аД = 0 , и точка d находится в полюсе) параллельно СD в направлении от точки С к точке D отложим отрезок n3 , изображающий ускорение нормальной составляющей. Длина отрезка определяется следующим образом: делим отрезок нормальной составляющей, измеренной с плана ускорений в миллиметрах на масштабный коэффициент плана ускорений. Через точку n3 перпендикулярно к СD проводим направление вектора тангенциальной составляющей до пересечения в точке с. Точку c соединим с полюсом. Отрезок πс будет изображать вектор aС. полного ускорения точки C, а отрезки n2c и n3c - соответственно векторы тангенциальных ускорений . Соединив точки c и b, получим отрезок cb, изображающий вектор aСВ полного относительного ускорения точки С относительно точки В.
Теперь рассматриваем группу Ассура (4,5). В этой группе известны ускорения точки С звена 3 и неподвижной точки Ео на направляющей.
Нужно определить ускорение aЕ точки Е ползуна 5. Рассматривая движения точки Е сначала по отношению к точке С, а затем по отношению к точке Ео, составляем два векторных уравнения:


где  - поворотное (кориолисово) ускорение;
- поворотное (кориолисово) ускорение;  -ускорение скольжения (релятивное) точки Е относительно точки Ео. В приведенных уравнениях вектор аC известен,
-ускорение скольжения (релятивное) точки Е относительно точки Ео. В приведенных уравнениях вектор аC известен,
 = = 0 так как направляющая ползуна неподвижна.
= = 0 так как направляющая ползуна неподвижна.
Величину нормального ускорения определим: разделив относительную скорость на длину звена ЕС. У векторов тангенциального ускорения и релятивного ускорения известны только направления: тангенциальное составляющее перпендикулярно ЕС, a кориолисово ускорение параллельно направляющей ползуна 5.
Решаем векторные уравнения графически. В соответствии с первым уравнением из точки c плана ускорений откладываем отрезок cn4, изображающий ускорение нормальной составляющей. Длина отрезка определяется следующим образом: делим отрезок нормальной составляющей, измеренной с плана ускорений в миллиметрах на масштабный коэффициент плана ускорений. Отрезок cn4 проводим параллельно звену ЕС в направлении от точки Е к точке С. Через точку n4 проводим перпендикулярно к ЕС направление вектора тангенциальной составляющей. В соответствии со вторым уравнением через точку π проводим параллельно направляющей ползуна 5 направление вектора. Линии действия тангенциальной составляющей и релятивного ускорения пересекутся в точке е. Положения центров тяжести звеньев (точек S1, S2, S3, S4, S5) определяются по теореме подобия в соответствии с их расположением на плане механизма. Из построенного плана ускорений определяем величины ускорений:
аС = πc ·Ka, м/c2;
aS2 = πs2 ∙Ka, м/c2;
aE = πe ·Ka ,м/c2;
aS3 = πs3∙Ka, м/c2;
aS4 = πs4 ·Ka, м/c2.
Находим величины угловых ускорений ε2, ε3, ε4:
ε2 = aτCB /lCB, рад/c2;
ε3 = aτCD /lCD, рад/c2;
ε4 = aτEC /lEC, рад/c2.
Направления угловых ускорений ε2, ε3, ε4 определяем по направлению соответствующих тангенциальных ускорений путем переноса векторов этих ускорений в точки С, D, и Е соответственно.
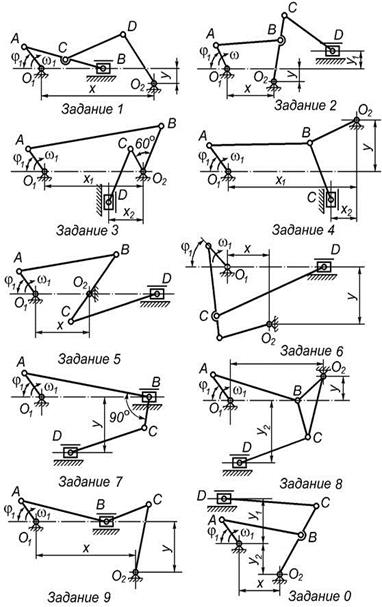
ВАРИАНТЫ ЗАДАНИЙ К ЗАДАЧЕ 2
| Обозначения данных | Номер варианта | |||||||||
| φ1 , град | ||||||||||
| АВ, мм | ||||||||||
| АС, мм | ||||||||||
| OA мм | ||||||||||
| СD, мм | ||||||||||
| О2 D, мм | ||||||||||
| y, мм | ||||||||||
| х,, мм | ||||||||||
| n1, мин-1 |
Таблица 1. Данные к заданию 1
Таблица 2. Данные к заданию 2
| Обозначения данных | Номер варианта | |||||||||
| φ1 , град | ||||||||||
| O1А, мм | ||||||||||
| АВ, мм | ||||||||||
| О2В, мм | ||||||||||
| О2С, мм | ||||||||||
| СD, мм | ||||||||||
| х, мм | ||||||||||
| у, мм | ||||||||||
| y1, мм | ||||||||||
| n1, мин-1 |
Таблица 3. Данные к заданию 3
| Обозначения данных | Номер варианта | |||||||||
| φ1, град | ||||||||||
| О1 А, мм | ||||||||||
| АВ, мм | ||||||||||
| ВО2, мм | ||||||||||
| СО2, мм | ||||||||||
| СD мм | ||||||||||
| х, мм | ||||||||||
| х1, мм | ||||||||||
| n1, мин-1 |
Таблица 4. Данные к заданию 4
| Обозначения данных | Номер варианта | |||||||||
| φ1, град | ||||||||||
| х1, мм | ||||||||||
| O1А, мм | ||||||||||
| АВ, мм | ||||||||||
| ВО2, мм | ||||||||||
| ВС, мм | ||||||||||
| y, мм | ||||||||||
| х, мм | ||||||||||
| n1, мин-1 |
Таблица 5. Данные к заданию 5
| Обозначения данных | Номер варианта | |||||||||
| φ1, град | ||||||||||
| O1А, мм | ||||||||||
| AB, мм | ||||||||||
| BO2, мм | ||||||||||
| BC, мм | ||||||||||
| CD, мм | ||||||||||
| х, мм | ||||||||||
| n1, мин-1 |
Таблица 6. Данные к заданию 6
| Обозначения данных | Номер варианта | |||||||||
| φ1, град | ||||||||||
| O1А, мм | ||||||||||
| АВ, мм | 4/5 | |||||||||
| ВО2, мм | ||||||||||
| АС, мм | ||||||||||
| СD, мм | ||||||||||
| х, мм | ||||||||||
| y, мм | ||||||||||
| n1, мин-1 |
Таблица 7. Данные к заданию 7
| Обозначения данных | Номер варианта | |||||||||
| φ1, град | ||||||||||
| O1А, мм | ||||||||||
| АВ, мм | ||||||||||
| ВС, мм | ||||||||||
| СD, мм | ||||||||||
| y, мм | I60 | |||||||||
| n1, мин-1 |
Таблица 8. Данные к заданию 8
| Обозначения данных | Номер варианта | |||||||||
| φ1, град | ||||||||||
| O1А, мм | ||||||||||
| АВ, мм | ||||||||||
| ВО2, мм | ||||||||||
| ВС, мм | ||||||||||
| О2С, мм | ||||||||||
| СD, мм | ||||||||||
| х, мм | ||||||||||
| у, мм | I70 | |||||||||
| y1, мм | ||||||||||
| n1, мин-1 |
Таблица 9. Данные к заданию 9
| Обозначения данных | Номер варианта | |||||||||
| φ1, град | I00 | |||||||||
| O1А, мм | I00 | |||||||||
| АВ, мм | ||||||||||
| ВС, мм | ||||||||||
| СD, мм | ||||||||||
| х, мм | ||||||||||
| y, мм | ||||||||||
| n1, мин-1 |
Таблица 10. Данные к заданию 0
| Обозначение данных | Номер варианта | |||||||||
| φ1, град | ||||||||||
| O1А, мм | ||||||||||
| АВ, мм | ||||||||||
| ВО2, мм | ||||||||||
| ВС, мм | ||||||||||
| СD, мм | ||||||||||
| y1 , мм | ||||||||||
| y2, мм | ||||||||||
| x, мм | ||||||||||
| n1, мин-1 |
Дата добавления: 2016-01-30; просмотров: 2286;