Особенности расчета ковшового элеватора
Производительность ковшового элеватора
Q = 3,6 v0 υ ψ ρ / tк, (5.9)
где v0 – объем ковша, л;
tк – шаг ковшей, м.
Для глубоких и мелких расставленных ковшей tк= (2,5–3,0) h, для сомкнутых ковшей с бортовыми направляющими tк ≈ h, h – высота ковша, м.
Тип элеватора и форму ковшей выбирают по каталогу в зависимости от транспортируемого груза. Выбранные ковши проверяют по условию кусковатости
А ≥ х аmax, (5.10)
где А – высота ковша;
х – коэффициент, зависящий от типа груза: для рядовых грузов х = 2–2,5; для сортированных х = 4–4,5.
Тяговый расчет. Схема для проведения тягового расчета представлена на рис. 5.7.Тяговое усилие в набегающей на приводной барабан (звездочку) ветви
Sнб = Sн + (q0 + qг) H. (5.11)
Усилие в сбегающей с нижнего барабана (звездочки) ветви
Sн = Smin + Σ W. (5.12)
В ленточном элеваторе Smax = Sнб. В цепном элеваторе с учетом динамических нагрузок
Smax = Sнб + Sдин = Sн(q0 + qг) H + Sдин . (5.13)
Для двухцепного элеватора усилие в одной цепи
Smax= 1,15 (Sнб + Sдин) / 2. (5.14)
Минимальное натяжение цепи (ленты) предварительно принимают Smin= 5–20 кН.
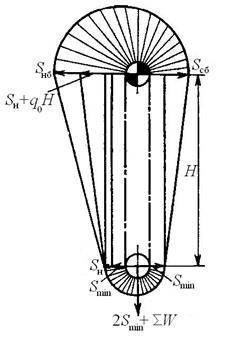
Рис. 5.7. Схема для выполнения тягового расчета
вертикального ковшового элеватора
Динамическое усилие в цепи элеваторов
Sдин= 3 S υ2 / z2 tц g, (5.15)
где S – нагрузка от неравномерно движущейся ходовой части и груза, Н;
S = (2q0 + qг) H, (5.16)
где z – число зубьев звездочки, шт;
tц – шаг цепи, м.
Сопротивление движению ходовой части
Σ W = Wн + Wзач. (5.17)
Сопротивление на нижнем барабане (звездочке)
Σ Wн = Sminω', (5.18)
где ω' – коэффициент сопротивления движению.
Сопротивление зачерпыванию
Wзач = kз qг, (5.19)
где kз= 1,25÷4,0 – коэффициент зачерпывания в зависимости от характеристики груза.
Натяжение тягового элемента в точке сбегания
Sсб = Smin + q0 H. (5.20)
Тяговое усилие на приводном валу
P = (Smax – Sсб) (1+ ω'). (5.21)
По тяговому усилию определяется мощность электродвигателя и выбирается электродвигатель по каталогу.
По рассчитанной мощности привода выбирают редуктор и вычисляют фактическую скорость рабочего органа. По тормозному моменту выбирают тормоз.
Динамический расчет заключается в определении усилий при установившемся режиме и в период пуска.
Дата добавления: 2016-01-30; просмотров: 632;