в) Короткозамкнутые двигатели. 7 страница
При коротком замыкании асинхронного двигателя также возникают переходные процессы, при которых получаются большие токи в обмотках и большие вращающие моменты. Здесь под коротким замыканием двигателя понимается случай, когда произошло внезапное короткое замыкание в сети, от которой двигатель получает питание. Наибольший мгновенный ток, получающийся в одной из фаз статора спустя приблизительно полпериода после короткого замыкания, достигает значения, в 1,2 — 1,35 раза превышающего значение амплитуды установившегося начального пускового тока. Возникающий при этом наибольший вращающий момент будет тормозящим, т. е. направленным против вращения ротора. Он примерно равен 2,3 — 2,7 Мнач.
Приведенные значения вращающих моментов, действующих на ротор и статор в начальные периоды переходных процессов, необходимо учитывать при конструировании двигателей. Момент, действующий на вал двигателя, зависит от отношения внешнего махового момента (GD2) рабочей машины к маховому моменту ротора двигателя. Он тем больше, чем больше это отношение.
3-31. Мощность машины, ее потери, частота вращения и размеры
Размеры машины, так же как и трансформатора, зависят от мощности
 . (3-244)
. (3-244)
Для э.д.с. мы можем написать:
 , (3-245)
, (3-245)
где w — число витков фазы; Ф — магнитный поток; Вс — индукция в сечении Sc какого-либо участка магнитной цепи.
Для тока можем написать:
 , (3-246)
, (3-246)
где  — плотность тока в проводнике, имеющем сечение sn.
— плотность тока в проводнике, имеющем сечение sn.
Подставляя (3-245) и (3-246) в (3-244), получим:
 (3-247)
(3-247)
или, обозначая общее сечение меди всех витков через Sм = wsn,
 . (3-248)
. (3-248)
Обратимся к ряду геометрически, подобных машин возрастающей мощности, имеющих одинаковые индукции Вс и плотности тока D. Под геометрически подобными машинами понимаются машины, соответственные размеры которых находятся в одном и том же отношении, так же как для геометрически подобных трансформаторов (§ 2-22). Для таких машин получим те же соотношения между их мощностью, весом, стоимостью и потерями, что и для трансформаторов [см (2-199), (2-200), (2-201)].
Нами рассматривался ряд геометрически подобных машин возрастающей мощности при постоянной частоте их вращения п (об/мин); для них мы можем, следовательно, принять, что вращающий момент М пропорционален мощности:
 . (3-249)
. (3-249)
Если рассматривать те же машины с различными частотами вращения, то их мощность пропорциональна Мп, т. е.
 . (3-250)
. (3-250)
Последнее соотношение показывает, что при одинаковых геометрических размерах и электромагнитных нагрузках Вс и D мощность машины пропорциональна частоте вращения. Следовательно, машины имеют тем меньшие размеры и стоимость, чем больше их частота вращения (в известных пределах, так как нужно считаться с механической прочностью вращающихся частей машины).
Полученные соотношения на практике оправдываются лишь с некоторым приближением. Для машин от них приходится еще больше отступать, чем для трансформаторов. Однако они дают правильную общую ориентировку при определении зависимости мощности и потерь машины от ее размеров и частоты вращения.
Связь между главными размерами электрической машины, ее мощностью, частотой вращения и основными электромагнитными нагрузками может быть установлена на основе приведенных далее соотношений.
Главными размерами электрической машины называются внутренний диаметр статора D и его расчетная длина lδ = l1 - nвbв, где l1 — полная длина статора; nв — число радиальных вентиляционных каналов; bв = 1 см — ширина канала. Основными электромагнитными нагрузками являются: линейная нагрузка А и максимальная индукция в воздушном зазоре Вδ.
Расчетная мощность машины, от которой зависят ее главные размеры, кВт,
 . (3-251)
. (3-251)
Если сюда подставить э.д.с., B, Е1 = 4,44f1k01w1Ф·10-3, заменив здесь f1, Гц, и Ф, Мкс, на их значения:
 ;
; 
где полюсное деление, см,
 ,
,
и учесть, что линейная нагрузка, А/см,
A = 
то получим:
 , (3-252)
, (3-252)
где  0,67
0,67  0,72 — расчетный коэффициент полюсного перекрытия, А = 200 450 A/см и Вδ = 6 500 8 200 Гс при Рн = 0,4 1 000 кВт (для двухполюсных машин А надо уменьшить на 15 20%, а Bδ — на 10 15%); k01
0,72 — расчетный коэффициент полюсного перекрытия, А = 200 450 A/см и Вδ = 6 500 8 200 Гс при Рн = 0,4 1 000 кВт (для двухполюсных машин А надо уменьшить на 15 20%, а Bδ — на 10 15%); k01  0,96 0,90 — обмоточный коэффициент.
0,96 0,90 — обмоточный коэффициент.
Из (3-252) можно видеть, как зависят главные размеры машины от мощности, частоты вращения и электромагнитных нагрузок А и Вδ. При определении Р' значения ηн и cosφн вначале приходится выбирать в зависимости от мощности Рн и числа пар полюсов р по данным выполненных машин (рис 3-119—3-122); kE = 0,97 0,92 соответственно при p =1 6.
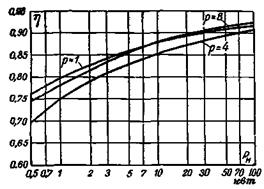
Рис. 3-119. Коэффициент полезного действия  трехфазных асинхронных двигателей в зависимости от номинальной мощности Рн.
трехфазных асинхронных двигателей в зависимости от номинальной мощности Рн.
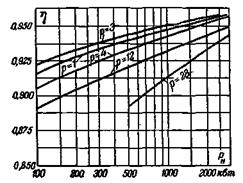
Рис. 3-120. Коэффициент полезного действия трехфазных асинхронных двигателей в зависимости от номинальной мощности Рн.
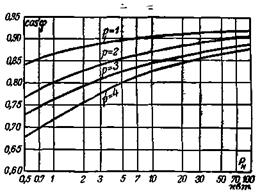
Рис. 3-121. Коэффициент мощности cos  трехфазных асинхронных двигателей в зависимости от номинальной мощности Рн.
трехфазных асинхронных двигателей в зависимости от номинальной мощности Рн.
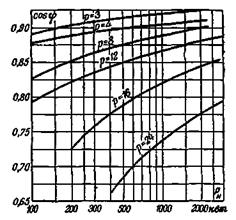
Рис. 3-122. Коэффициент мощности cos трехфазных асинхронных двигателей в зависимости от номинальной мощности Рн.
3-32. Коэффициент полезного действия и cosj асинхронных двигателей
Ранее рассматривались потери, возникающие в машине при ее работе. Приведем здесь относительные значения этих потерь для наиболее часто применяемых на практике нормальных асинхронных двигателей мощностью от 0,6 до 100 кВт при их номинальной нагрузке (с повышением номинальной мощности они уменьшаются).
Электрические потери в обмотке статора, отнесенные к номинальной мощности  приближенно равны:
приближенно равны:
7 2,5% при 2p = 4 и 2p = 6;
7,5 2,5% при 2р = 8.
Электрические потери в обмотках ротора примерно такие же, как в обмотках статора. В тех же пределах приблизительно колеблются значения скольжения s%.
Потери в стали статора Pс1 и потери от пульсаций поля в зубцах статора и ротора Pс.д, вызванные наличием пазов на статоре и роторе, составляют:

 .
.
Механические потери (потери на трение) Рмех зависят от частоты вращения и диаметра ротора, примененной системы вентиляции, типа подшипников. Они составляют:
 .
.
Добавочные потери Рдоб, возникающие при нагрузке, вызваны полями рассеяния и не могут быть достаточно точно рассчитаны или определены опытным путем. Их оценивают в 0,5% от подведенной к двигателю мощности P1н при номинальной нагрузке на валу.
Однако, как показывает опыт, они в современных короткозамкнутых двигателях при алюминиевой обмотке на роторе достигают 1 1.5% от Р1н.
Коэффициенты полезного действия современных двигателей достигают высоких значений. Они соответствуют кривым, приведенным на рис. 3-119 и 3-120. Электрические машины обычно рассчитываются таким образом, чтобы их к. п. д. был наибольшим при номинальной мощности или близкой к ней. Важной величиной, характеризующей работу двигателя, является его cos φ.
Размеры и стоимость генераторов электрических станций, трансформаторов, электрических сетей и аппаратуры зависят от произведения mUI, а их использование — от произведения mUIcos φ. Отсюда понятно, почему повышение cos φ представляет собой задачу, имеющую большое народнохозяйственное значение. Прежде всего стремятся повысить cos φ асинхронных двигателей, так как в электрических установках они являются основными потребителями реактивного тока. Реактивный ток, потребляемый двигателем, идет главным образом на создание основного магнитного поля. Он мало отличается от тока холостого хода. Поэтому для улучшения cos φ двигателя нужно уменьшить его ток холостого хода, что достигается путем уменьшения воздушного зазора δ между статором и ротором. При этом снижается магнитное сопротивление для главного потока Ф, и, следовательно, для его создания требуется меньший реактивный (намагничивающий) ток. Однако при выборе δ приходится считаться с необходимостью получить механически надежную машину, изготовление и установка которой не вызывают больших затруднений. Вследствие этого для δ существует некоторое минимальное значение, ниже которого не следует спускаться. Для машин различной мощности δ = 0,2 1,5 мм (см. § 3-16, табл. 3-4).
При проектировании асинхронных двигателей большое внимание уделяется вопросу получения высокого соs φ. В этом отношении заводы Советского Союза имеют большие достижения: выпускаемые ими в настоящее время нормальные асинхронные двигатели имеют высокие значения соs φ. На рисунках 3-121 и 3-122 приводятся значения соs φ при номинальной мощности на валу. При меньших нагрузках соs φ снижается (рис. 3-54), так как при этом активная составляющая тока уменьшается, тогда как его реактивная составляющая остается почти без изменения. Поэтому для электропривода следует выбирать двигатель так, чтобы он работал по возможности с номинальной нагрузкой.
3-33. Современные асинхронные машины
Конструкции и характеристики асинхронных двигателей, выпускаемых заводами Советского Союза, вполне определяют современное состояние электромашиностроения в данной области.
Ранее отмечалось, что асинхронные двигатели являются наиболее распространенными электрическими машинами. В СССР годовой выпуск таких машин по мощности составляет около 15 млн. кВт и в 1965 г. должен составить около 35 млн. кВт. Поэтому их проектированию и изготовлению всегда уделялось и уделяется большое внимание. Массовое изготовление машин требует особенно тщательной разработки их конструкции и технологических методов производства. Большое значение при этом получают вопросы унификации и нормализации деталей и целых конструктивных узлов, их взаимозаменяемости. В связи с этим целесообразно создание серий машин, т. е. рядов машин возрастающей мощности, объединенных общностью конструкции и технологических методов производства и предназначенных для массового изготовления.
Задача проектирования и изготовления серий электрических машин может быть правильно разрешена только в условиях планового социалистического хозяйства. Только при таких условиях возможно создание единых серии электрических машин для всех отечественных заводов, изготовление которых дает большие экономические выгоды и вместе с тем обеспечивает их высокие эксплуатационные свойства.
Единые серии асинхронных двигателей, изготовляемых на заводах Советского Союза, охватывают мощности от долей ватта до нескольких тысяч киловатт и различные частоты вращения. Они строятся на номинальные напряжения 127, 220, 380, 500, 660, 3000, 6000 и 10000 В.
Основной серией трехфазных асинхронных двигателей массового применения является серия А. (Выбор обозначения для серии маши (в данном случае А) совершенно произволен. Так, например, серии асинхронных машин небольшой мощности, выпускавшихся заводами Советского Союза примерно до 1950 г., имели обозначения АД, МА и др.) В нее входят двигатели мощностью от 0,6 до 125 кВт. На базе серии А разработаны различные модификации: двигатели с повышенным пусковым моментом, с повышенной способностью к перегрузке по моменту, с повышенным скольжением, с контактными кольцами и др. На рис. 3-123 представлен двигатель серии А.
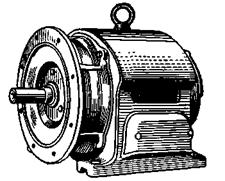
Рис. 3-123. Двигатель серии А с фланцем для крепления.
Все двигатели этой серии выполняются с короткозамкнутой алюминиевой клеткой на роторе. Общепринятой конструкцией для них является защищенная конструкция, при которой исключается попадание в машину капель воды, падающих сверху или под углом 45° к горизонтали. Двигатели серии А имеют корпус и подшипниковые щиты, выполненные из чугуна или при малых мощностях из алюминиевого сплава. В последнем случае они обозначаются как серия АЛ.
На рис. 3-124 представлен двигатель серии АО. Двигатели этой серии имеют закрытую конструкцию с обдувом внешней ребристой поверхности корпуса статора, который осуществляется при помощи вентилятора. Последний помещен на валу двигателя между внутренним щитом, закрывающим ротор двигателя, и внешним щитом с отверстиями для прохода воздуха. Малые двигатели закрытой конструкции с обдувом внешней поверхности корпуса статора делаются также с корпусом статора и щитами из алюминия. Они входят в серию АОЛ. Заводами выпускаются также двигатели серии АК — двигатели с контактными кольцами мощностью до 125 кВт (рис. 3-125).
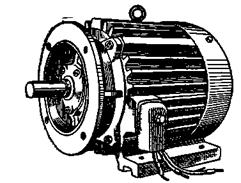
Рис. 3-124. Двигатель серии АО.
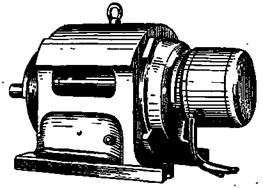
Рис. 3-125. Двигатель серии АК (справа виден кожух, закрывающий контактные кольца).
В настоящее время заводы Советского Союза начинают выпускать двигатели мощностью от 0,4 до 125 кВт новых серий, которые обозначены А2 и АО2. Эти двигатели по сравнению с двигателями серий А и АО легче по весу, имеют изоляцию статорных обмоток более высоких классов.
Двигатели большой мощности (от 140 до 1 250 кВт) с фазным ротором (с контактными кольцами) объединены в серию ФАМСО. Они изготовляются для эксплуатации в угольной и нефтяной промышленности, для нужд электростанций и других областей народного хозяйства. Эти двигатели имеют защищенную конструкцию с самовентиляцией, как и большинство асинхронных двигателей. Подвод воздуха здесь осуществляется через отверстия, расположенные в нижних частях подшипниковых щитов, выход воздуха — через боковые закрытые жалюзи отверстия с обеих сторон корпуса статора.
На те же мощности строятся короткозамкнутые двигатели с двойной клеткой или бутылочными пазами на роторе, объединенные в серию ДАМСО (рис. 3-126), а также с глубокими пазами на роторе серии ГАМ. Они находят себе применение в тех же случаях, что и двигатели ФАМСО. Двигатели предназначены для работы в тяжелых условиях: прямой пуск при полном напряжении, реверсирование, торможение (на рис. 3-127 представлен продольный разрез одного из современных двигателей с контактными кольцами).
В СССР разработаны также двигатели на мощности от 125 до 1000 кВт, которые объединены в новые серии А и АК. Многие типы этих двигателей уже выпускаются заводами взамен двигателей ДАМСО, ГАМ и ФАМСО.
Отечественными заводами выпускаются тихоходные двигатели большой мощности (на тысячи киловатт) для нужд угольной, металлургической и других отраслей промышленности, а также быстроходные двигатели при синхронной частоте вращения 3000, 1500 об/мин на мощности в несколько тысяч киловатт, которые предназначаются для мощных вентиляторов.
Большое количество асинхронных двигателей особой конструкции выпускается для текстильной, деревообрабатывающей и станкостроительной промышленности. Они часто имеют специальные характеристики: большой начальный пусковой момент, повышенную способность к перегрузке по моменту, повышенное скольжение.
В последние годы созданы отдельные типы небольших двигателей на очень большие частоты вращения. Такие двигатели получают питание от высокочастотных генераторов переменного тока. Статор их выполняется с обычной трехфазной обмоткой, ротор — в виде цельного стального цилиндра, причем для него берется сталь весьма высокого качества, так как даже при малом диаметре ротора его окружная скорость достигает 200 — 250 м/сек. Вращающий момент двигателя создается в результате взаимодействия вращающегося поля и токов, наведенных им в стали ротора. Эти токи вытесняются к внешней поверхности ротора и протекают в тонком поверхностном слое его, вследствие чего индуктивное сопротивление рассеяния контуров токов ротора имеет малое значение. Вытеснение токов обусловлено их большой частотой: например, при f = 2000 Гц и s = 0,08 получим: f2 = sf1 = 160 Гц. При f1 = 2000 Гц и s = 0,08 двухполюсный двигатель будет вращаться с частотой 110 400 об/мин. Указанные двигатели применяются при тонкой шлифовке металлических изделий и для других целей.
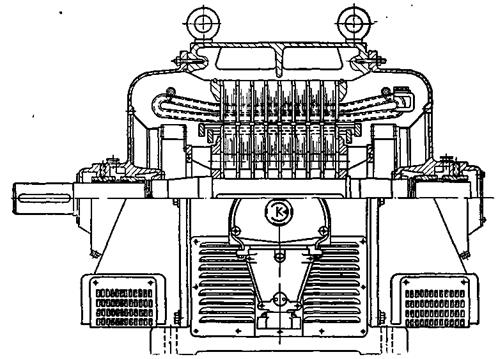
Рис. 3-126. Короткозамкнутый двигатель с двойной клеткой на роторе серии ДАМСО.
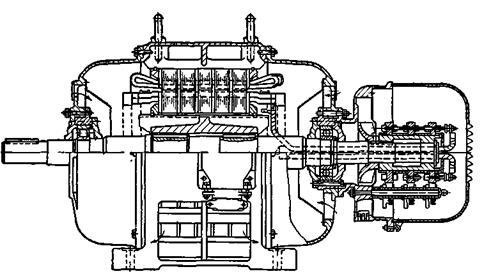
Рис. 3-127. Трехфазный асинхронный двигатель с контактными кольцами.
Дата добавления: 2016-01-29; просмотров: 981;