в) Короткозамкнутые двигатели. 6 страница
На рис. 3-110 представлена принципиальная схема двухполюсного поворотного трансформатора с двумя - взаимно-перпендикулярными обмотками на статоре и на роторе.
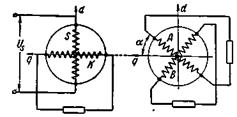
Рис. 3-110. Схема соединений обмоток синус-косинусного поворотного трансформатора.
Назовем оси обмоток статора S и K соответственно продольной (d) и поперечной (q) осями поворотного трансформатора. Его обмотка статора S включается на переменное напряжение Us. При этом возникает продольное пульсирующее поле, которое будет наводить в обмотках ротора А и В э.д.с. Их значения зависят от угла поворота ротора а, который будем отсчитывать от положения ротора, когда ось его обмотки А совпадает с поперечной осью q.
Очевидно, что при строго синусоидальном распределении поля в зазоре вдоль окружности ротора и при отсутствии нагрузки с вторичной стороны напряжение на обмотке А при повороте ротора будет изменяться пропорционально sinα, a напряжение на обмотке В — пропорционально cosα. Таким образом, при использовании той или другой обмотки ротора получим синусный или косинусный, а при использовании обеих обмоток ротора — синус-косинусный поворотный трансформатор.
К поворотным трансформаторам предъявляются весьма высокие требования в отношении точности соблюдения указанных зависимостей вторичных напряжений от угла α. Эти требования могут быть удовлетворены только при применении специальных обмоток, обеспечивающих близкие к синусоидальным кривые их н.с., при слабом насыщении стальных участков магнитной цепи поворотного трансформатора и при самом тщательном изготовлении его деталей. Кроме того, большое значение имеет правильный выбор чисел пазов статора и ротора и применение скоса пазов ротора или статора.
Напряжения на зажимах вторичных обмоток и при их нагрузке будут пропорциональны sinα и cosα, если эти обмотки и приключенные к ним внешние сопротивления одинаковы. При таком выполнении схемы получается так называемое симметрирование поворотного трансформатора на вторичной стороне. В этом случае поперечные н.с. обеих обмоток ротора, действующие всегда в противоположные стороны, равны между собой при любом α. Здесь, следовательно, не будет возникать поперечный поток, который в обмотке А создавал бы э.д.с., пропорциональную cos2α, а в обмотке В — э.д.с., пропорциональную sin2α. Кроме того, при указанном симметрировании вторичных цепей ротора сумма продольных н.с. его обеих обмоток не будет зависеть от угла α, поэтому и ток в обмотке S статора при Us = const будет сохранять свое значение, что приводит к постоянному значению продольного потока, не зависящему от угла α. Обмотка K на статоре замыкается обычно накоротко или на сопротивление, равное сопротивлению источника однофазного тока, если мощность его невелика. В этом случае получается симметрирование поворотного трансформатора на первичной стороне, которое также препятствует возникновению поперечного потока, например при некотором различии внешних сопротивлений вторичных цепей.
Схема линейного поворотного трансформатора приведена на рис. 3-111.
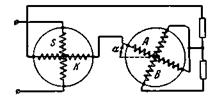
Рис. 3-111. Схема соединений обмоток линейного поворотного трансформатора.
При такой схеме, где также применяется симметрирование на вторичной стороне, удается получить линейную зависимость напряжения на зажимах последовательно соединенных обмоток K. и А от угла поворота ротора а с точностью до 0,1% примерно в пределах изменения α от - 37 до + 37°.
3-28. Асинхронная машина двойного питания
Если статорная и роторная обмотки асинхронной машины получают питание от сети (или сетей) переменного тока, то такую машину называют асинхронной машиной двойного питания. При этом обычно имеется в виду трехфазная машина, обмотки которой получают питание от одной и той же сети трехфазного тока. Эти обмотки могут включаться параллельно или последовательно. Название «машина двойного питания» характеризует схему включения ее обмоток, а не ее рабочие свойства, которые будут различными в зависимости от направления вращения н с статора и ротора.
Рассмотрим сначала машину с последовательно соединенными обмотками статора и ротора, создающими н.с, вращающиеся в одну и ту же сторону. В этом случае получается регулируемая (поворотная) реактивная катушка, позволяющая путем поворота ротора изменять в широких пределах ее индуктивное сопротивление. При повороте ротора изменяется угол α между осями н.с. последовательно включенных обмоток статора и ротора, вследствие чего изменяется их взаимная индуктивность.
Общее активное сопротивление машины (на фазу) r = r1 + r2 = const, и ее общее индуктивное сопротивление x = x1 + x2 + x1г + x2г + 2x12сosα, где x1 и х2 — индуктивные сопротивления рассеяния обмоток; x1г и x2г — их главные индуктивные сопротивления (от главного потока в воздушном зазоре), х12 — индуктивное сопротивление взаимной индукции при совпадении осей н.с. обмоток, когда они направлены в одну сторону. Чтобы получить изменение х в возможно более широких пределах, надо обмотки выполнить с равными эффективными числами витков Тогда x1г = x2г = x12, x1  x2 и мы получим:
x2 и мы получим:
 .
.
Следовательно, предельные значения при α = 0 и α = 180°:
 и
и  .
.
При параллельном включении одинаковых обмоток статора и ротора предельные значения х уменьшаются в 4 раза. Поворотная реактивная катушка находит себе применение при испытании электрических машин и трансформаторов, когда необходимо, например, изменять их индуктивную нагрузку.
Если обмотки статора и ротора асинхронной машины, приключенные к одной и той же сети, создают н.с., вращающиеся в разные стороны, то такая асинхронная маши
на двойного питания может работать как двигатель или генератор. Однако для этого ее надо предварительно разогнать посторонним двигателем до скорости вращения, равной двойной синхронной 2n1. Тогда после подключения обмоток к сети их н.с. будут вращаться в пространстве с одной и той же синхронной скоростью и, следовательно, будут неподвижны одна относительно другой. Созданное их совместным действием магнитное поле будет вращаться с синхронной частотой n1 относительно каждой из обмоток и будет наводить в них э.д.с. частоты сети.
Будем считать, что обмотки статора и ротора одинаковы и что они продключены к сети параллельно. При отсутствии потерь в маши не и при работе ее вхолостую в обмотках будут только намагничивающие токи и созданные ими н.с. будут равны и направлены в одну и ту же сторону. Поле, созданное результирующей н.с., будет наводить э.д.с. в обмотках, почти полностью уравновешивающие приложенные к ним напряжения, что возможно только при частоте вращения ротора, равной 2n1. При отклонении от этой частоты в обмотках возникнут токи, которые можно назвать синхронизирующими, так как созданный ими вращающий момент восстанавливает частоту 2n1. Следовательно, машина обладает свойствами синхронной машины.
При нагрузке машины оси н.с. статора и ротора не будут совпадать, между ними установится некоторый сдвиг в пространстве, но они по-прежнему будут вращаться относительно статора с частотой n1 при частоте ротора 2п1. При этом токи в обмотках увеличиваются, создается вращающий момент, направленный в сторону вращения ротора при работе машины двигателем и против вращения ротора при работе машины генератором, в чем можно было бы убедиться, построив диаграммы напряжений и токов для обмоток. Из диаграмм было бы видно, что при двигательном режиме ток в обмотке сдвинут по фазе относительно э.д.с., наведенной главным полем, на угол, больший 90°, а при генераторном режиме ток в обмотке сдвинет по фазе относительно той же э.д.с. на угол, меньший 90о.
Указанные машины двойного питания не нашли себе практического применения. При использовании их в двигательном режиме требуется разгонный двигатель, при помощи которого можно было бы довести их частоту вращения до двойной синхронной. Кроме того, при включении машины встречаются затруднения при синхронизации ее с сетью. Другим большим недостатком этих машин является склонность их к качаниям и связанная с этим в ряде случаев недостаточная устойчивость в работе (см § 4-12).
3-29. Асинхронные машины для синхронной связи
На практике иногда необходимо иметь согласованное вращение двух или нескольких механизмов, удаленных один от другого на большое расстояние или установленных таким образом, что механическое соединение их, например, при помощи общего вала невозможно или нецелесообразно. Можно в этих случаях использовать трехфазные асинхронные машины с контактными кольцами, которые при определенной схеме их соединения позволяют без общего механического вала осуществить согласованное вращение механизмов (или синхронную связь между ними). Такие асинхронные машины образуют «электрический вал». Схема их соединения, называется схемой электрического вала.
Рассмотрим наиболее часто применяемую схему электрического вала, представленную на рис. 3-112. Здесь показаны два приводных двигателя Д1 и Д11, которые связаны с рабочими механизмами через вал 1 и вал 11.
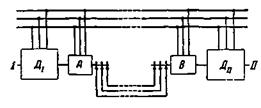
Рис. 3-112. Схема электрического вала.
Чтобы иметь согласованное вращение механизмов и, следовательно, приводных двигателей, с ними механически соединяются асинхронные машины с контактными кольцами A и В. Статорные обмотки последних приключаются к одной и той же сети трехфазного тока, а роторные обмотки соединяются параллельно через контактные кольца. При такой схеме включения машин А и В они будут выравнивать нагрузки двигателей Д1 и Д11 и в то же время поддерживать синхронное вращение обоих валов.
Когда машины неподвижны, то при одинаковом положении роторов относительно статоров они аналогичны двум параллельно включенным трансформаторам при их работе вхолостую. Если повернуть ротор одной машины при неподвижном роторе другой, то в роторных и соответственно в статорных обмотках возникнут токи. Они создадут в машинах вращающие моменты, которые будут направлены таким образом, чтобы восстановить прежнее положение роторов относительно статоров. Следовательно, на вал каждой машины будет действовать синхронизирующий момент, который будет возрастать с углом поворота ротора, но до известного предела. Если перейти этот предел, то синхронная связь между валами нарушается. Можно считать, что электрический вал осуществляет как бы эластичную связь между рабочими механизмами.
Передача момента при электрическом вале (как и при эластичном механическом) возможна не только при покое двух роторов, но и при их вращении, причем синхронная связь между ними будет сохраняться, если вследствие сдвига по фазе э.д.с. роторов будут возникать токи, необходимые для создания синхронизирующих моментов. В этом отношении получается существенное различие при вращении роторов по полю и против поля. Если роторы вращаются в направлении вращения поля, синхронизирующий момент при s 0 будет очень мал; если они вращаются против поля, возможна передача больших моментов при широких пределах изменения частоты вращения (рис. 3-113).
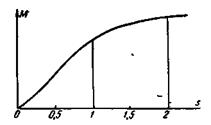
Рис. 3-113. Момент электрического вала в зависимости от скольжения.
Мощности машин А и В выбираются в зависимости от наибольшего возможного различия нагрузок двигателей Д1 и Д11. Обычно схема электрического вала по рис. 3-112 применяется в тех случаях, когда нагрузки двигателей Д1 и Д11 мало отличаются одна от другой.
Большое практическое значение в настоящее время имеют малые асинхронные машины, применяемые для осуществления синхронной связи между элементами автоматических устройств. Они получили название сельсинов (Selsyn — сокращение английских слов self-synchronizing («самосинхронизирующийся»). Рассмотренные ранее трехфазные машины, при помощи которых осуществляется синхронная связь между относительно мощными механизмами, иногда называются силовыми сельсинами.) и по устройству представляют собой асинхронные машины с контактными кольцами, имеющие обычно на роторе трехфазную обмотку и на статоре однофазную или трехфазную. Однофазная обмотка статора часто выполняется в виде двух катушек, надетых на два явновыраженных полюса. Она получает питание от источника однофазного тока и называется обмоткой возбуждения. В этом случае сельсины называются однофазными. Трехфазная распределенная обмотка ротора соединяется в звезду. Она называется обмоткой синхронизации.
Статор и ротор такого сельсина собираются из листов электротехнической стали (рис. 3-114), причем ротор делается со скошенными пазами для ослабления зубцовых гармоник в кривых э.д.с. На контактные кольца накладываются щетки, обеспечивающие надежный контакт и малое переходное сопротивление.
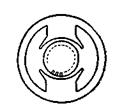
Рис. 3-114. Листы статора и ротора однофазного сельсина
В настоящее время широкое применение нашли себе бесконтактные сельсины, первые типы которых были разработаны в Советском Союзе А. Г. Иосифьяном и Д. В. Свечарником. Эти сельсины не имеют скользящих контактов, что повышает надежность и точность их работы.
Устройство бесконтактного сельсина схематически представлено на рис. 3-115.
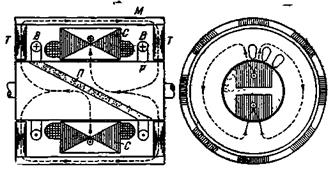
Рис. 3-115. Схема устройства бесконтактного сельсина.
Здесь ротор Р состоит из двух пакетов, набранных из листовой стали и разделенных косым промежутком П, заполненным немагнитным материалом. Листы ротора расположены параллельно оси вала, как показано на рисунке справа. Оба пакета заливаются алюминиевым сплавом и вместе с ним обрабатываются в виде цилиндра. Ротор не имеет никакой обмотки. Статор состоит из основного пакета С и двух боковых колец (тороидов) Т. Основной пакет статора С имеет пазы, в которых уложена трехфазная обмотка синхронизации. Она выполняется так же, как в обычной двухполюсной асинхронной машине. К тороидам примыкают пакеты внешнего магнитопровода М, набранные из полосок электротехнической стали. Они заливаются алюминиевым сплавом и образуют наружный цилиндрический корпус. Между тороидами и основным статорным пакетом помещаются кольцевые катушки В, охватывающие ротор. Они соединяются последовательно и образуют обмотку возбуждения. Как и в случае контактных сельсинов, обмотка возбуждения продключается к однофазной сети, а обмотка синхронизации — к линии связи.
Для выяснения принципа работы бесконтактного сельсина проследим путь магнитного потока, созданного катушками обмотки возбуждения. Примем, что в данный момент времени ток в катушках направлен, как указано на рис. 3-115. Тогда поток будет направлен справа налево. В правой части поток пойдет по стали ротора в аксиальном направлении до промежутка П, где он повернет , и пойдет вверх через зазор между ротором и основным пакетом статора С. Затем, пройдя зубцовый слой статора, поток поворачивает за плоскость чертежа (показано крестиком в кружке) и проходит вдоль ярма статора в его нижнюю часть (точка в кружке), откуда, снова пройдя зубцовый слой статора и зазор, он поступает в ротор, но уже слева от промежутка П. Далее, пройдя левую часть ротора, поток разделяется на две части и через тороиды и магнитопровод возвращается в правую часть ротора. Следовательно, поток, проходя через зубцовый слой статора, будет сцепляться с обмоткой синхронизации. Если поворачивать ротор, то потокосцепления фаз этой обмотки будут изменяться так же, как при повороте ротора контактного сельсина. По принципу действия бесконтактный и контактный сельсины не отличаются один от другого.
В зависимости от назначения и режимов работы различают: сельсины, работающие в индикаторном режиме; сельсины, работающие в трансформаторном режиме, и дифференциальные сельсины.
Однофазные сельсины, работающие в индикаторном режиме, образуют систему, состоящую из датчика и приемника или приемников. Рассмотрим случай, когда от одного датчика работает один приемник, обеспечивающий синхронный поворот или синхронное вращение индикатора (стрелки) в каком-либо пункте, удаленном на некоторое расстояние от датчика. Соответствующая схема включения сельсина-датчика (Д) и сельсина-приемника (П) показана на рис. 3-116.
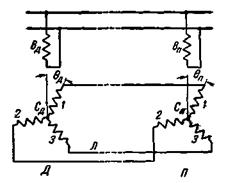
Рис. 3-116. Схема соединения однофазных сельсинов при индикаторном режиме работы.
Здесь: ВД и ВП — обмотки возбуждения; СД и СП — обмотки синхронизации; Л — линия связи. Принцип действия сельсинов при их соединении по рис. 3-116 заключается в следующем.
Обмотка возбуждения В, подключенная к сети однофазного тока, создает пульсирующий по ее оси магнитный поток, сцепляющийся с фазами обмотки С. При этом в фазах наводятся э.д.с., амплитуды которых зависят от угла сдвига осей фаз относительно оси обмотки В, но по фазе (во времени) они совпадают (при максимальном потоке их значения равны амплитудам; при потоке, равном нулю, их значения также равны нулю). Примем за исходное положение ротора, когда ось его фазы 1 совпадает с осью обмотки В, и рассмотрим случай, когда ротор сельсина Д повернут относительно исходного положения на угол  , а ротор сельсина П — на угол
, а ротор сельсина П — на угол  . Разность углов и определяет угол рассогласования
. Разность углов и определяет угол рассогласования  , т. е. - = . Если 0, то в соответственных фазах роторов наводятся различные по величине э.д.с. и в них возникают токи, которые, взаимодействуя с магнитными полями, создают вращающие моменты. Они направлены в сельсинах таким образом, чтобы привести угол рассогласования к нулевому значению.
, т. е. - = . Если 0, то в соответственных фазах роторов наводятся различные по величине э.д.с. и в них возникают токи, которые, взаимодействуя с магнитными полями, создают вращающие моменты. Они направлены в сельсинах таким образом, чтобы привести угол рассогласования к нулевому значению.
Если ротор датчика поворачивать, то при = 0,75  2,5° (в зависимости от класса точности сельсинов) ротор приемника также начнет поворачиваться и указанный угол рассогласования будет оставаться неизменным или даже несколько уменьшится из-за уменьшения трения после трогания с места. На практике очень часто от одного датчика работает несколько приемников, установленных в ряде пунктов.
2,5° (в зависимости от класса точности сельсинов) ротор приемника также начнет поворачиваться и указанный угол рассогласования будет оставаться неизменным или даже несколько уменьшится из-за уменьшения трения после трогания с места. На практике очень часто от одного датчика работает несколько приемников, установленных в ряде пунктов.
При работе сельсинов в индикаторном режиме синхронный поворот или синхронное вращение передается обычно только на стрелку индикатора, посаженную непосредственно на вал сельсина-приемника. Здесь сельсин-приемник является в то же время исполнительным механизмом, требующим очень небольшого вращающего момента.
Если необходимо осуществить туже передачу, но к механизму, требующему относительно большого вращающего момента, то используется схема, представленная на рис. 3-117. На этой схеме показаны сельсины, не отличающиеся по устройству от ранее рассмотренных. Обмотка возбуждения сельсина-датчика (СД) подключается к источнику однофазного тока; его обмотка синхронизации СД соединяется с обмоткой синхронизации СП второго сельсина, который здесь работает в трансформаторном режиме как сельсин-трансформатор (СТ). Его обмотка СП является первичной обмоткой, а обмотка статора ВП — вторичной (выходной) обмоткой. Она через усилитель (У) соединяется с исполнительным двигателем (ИД), который работает на некоторую нагрузку. В то же время исполнительный двигатель через редуктор связан с валом СТ. Рабочий процесс элементов схемы протекает следующим образом.
При включенной обмотке ВД в фазах обмотки Сд наводятся э.д.с., которые создают токи в обеих обмотках синхронизации СД и СП. Токи в обмотке СП вызовут пульсирующую н.с. При показанном на рис. 3-117 положении роторных обмоток сельсинов относительно их статорных обмоток ось н.с. в сельсине СТ будет сдвинута на 90° по отношению к оси обмотки ВП и, следовательно, в этой обмотке никакой э.д.с. не возникнет.
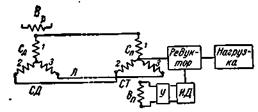
Рис. 3-117. Схема соединения при трансформаторном режиме работы сельсина СТ.
Если теперь повернуть ротор сельсина СД на некоторый угол θ, то токи в фазах обмоток СД и СП изменяются и ось н.с. обмотки СП также повернется на угол θ. При этом на зажимах обмотки ВП возникнет напряжение, зависящее от угла θ. Оно непосредственно воздействует на усилитель У, выход которого соединен с исполнительным двигателем ИД. Двигатель ИД приводит в действие нагрузку и одновременно поворачивает ротор СТ в такое положение, при котором ось н.с. его обмотки СП снова будет сдвинута на 90° относительно оси обмотки ВП. Таким образом, нагрузочный механизм будет повторять повороты или вращение ротора СД. Исполнительный механизм и датчик СД не нуждаются в механической связи и могут быть расположены на большом расстоянии один от другого, причем линия связи Л здесь не требует больших затрат, так как передаваемая ею мощность (в соответствии с мощностью СД и СТ) весьма мала.
Если необходимо осуществить управление из двух пунктов, применяется дифференциальный сельсин. В отличие от ранее рассмотренных сельсинов он имеет на роторе и на статоре трехфазные обмотки и используется обычно в качестве приемника, а в качестве датчиков для него служат два однофазных сельсина (рис. 3-118).
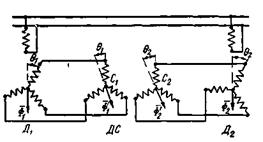
Рис. 3-118. Схема управления дифференциальным сельсином-приемником ДС при помощи двух обычных сельсинов-датчиков Д1 и Д2.
Работа дифференциального сельсина протекает следующим образом.
Предположим, что ротор датчика D1 совершил поворот по часовой стрелке на угол θ1. При этом ось н.с. обмотки С1 и создаваемого ею потока  также повернется на угол θ1, но против часовой стрелки. Поворачивая ротор датчика D2 по часовой стрелке на угол θ2, получим поворот оси н.с. обмотки С2 и создаваемого ею потока
также повернется на угол θ1, но против часовой стрелки. Поворачивая ротор датчика D2 по часовой стрелке на угол θ2, получим поворот оси н.с. обмотки С2 и создаваемого ею потока  на тот же угол θ2, но также против часовой стрелки. Создается вращающий момент, действующий таким образом, чтобы магнитные потоки и совпали по направлению. Следовательно, ротор дифференциального сельсина должен повернуться на угол θ2 - θ1. Если ротор датчика D2 повернут на угол θ2 против часовой стрелки, то ротор дифференциального сельсина поворачивается на угол, равный сумме углов θ1 - θ2.
на тот же угол θ2, но также против часовой стрелки. Создается вращающий момент, действующий таким образом, чтобы магнитные потоки и совпали по направлению. Следовательно, ротор дифференциального сельсина должен повернуться на угол θ2 - θ1. Если ротор датчика D2 повернут на угол θ2 против часовой стрелки, то ротор дифференциального сельсина поворачивается на угол, равный сумме углов θ1 - θ2.
3-30. Переходные процессы в асинхронных машинах
Изменение режима работы асинхронной машины связано с переходными процессами, которыми сопровождается переход от одного установившегося режима ее работы к другому. Они характеризуются возникновением уравнительных токов и магнитных полей, постепенно затухающих до нулевых значений.
Переходные процессы в асинхронной машине значительно сложнее, чем в трансформаторе, так как одна из ее обмоток вращается относительно другой, при этом уравнительные токи и поля создают переменные вращающие моменты, которые воздействуют на ротор машины и вызывают изменение его частоты вращения. Они обычно исследуются приближенно при ряде допущений.
Мы здесь ограничимся только качественным рассмотрением некоторых переходных процессов в асинхронных машинах и приведем значения характеризующих их токов и моментов.
Рассмотрим процессы при включении.
Обратимся сначала к короткозамкнутому двигателю. При его включении на установившийся пусковой ток будет накладываться свободный ток, который приближенно можно считать апериодическим, быстро затухающим до нуля. Свободный ток будет наибольшим в одной из фаз обмотки статора. В момент включения при наиболее неблагоприятном случае он равен амплитуде начального установившегося тока  . Спустя приблизительно полпериода, он складывается с установившимся пусковым током. Тогда максимальное мгновенное значение тока в фазе обмотки статора получается примерно равным:
. Спустя приблизительно полпериода, он складывается с установившимся пусковым током. Тогда максимальное мгновенное значение тока в фазе обмотки статора получается примерно равным:  .
.
Так как у малых машин затухание свободного тока происходит значительно быстрее из-за относительно больших активных сопротивлений обмоток, то для них iмакс имеет меньшее значение.
При включении двигателей с контактными кольцами их обмотка ротора замкнута, как правило, на большое пусковое сопротивление. Поэтому здесь не получается больших бросков тока. Если же двигатель включается при разомкнутой обмотке ротора, то возникают процессы, аналогичные процессам при включении трансформатора, имеющего разомкнутую вторичную обмотку (§ 2-20,а). Магнитный поток, сцепляющийся с одной из фаз обмотки статора, в самом неблагоприятном случае может быть равен, спустя примерно полпериода после включения, 1,8 — 1,9 его номинального значения. При этом, учитывая насыщение стальных участков магнитной цепи, получим наибольший мгновенный ток в данной фазе, превышающий амплитуду номинального тока в 2 — 2,5 раза.
Следует также отметить, что после включения короткозамкнутого двигателя в нем наряду с установившимся пусковым моментом возникают переменные переходные моменты, которые, накладываясь на первый, могут значительно повысить результирующий момент в начальный период пуска. Они возникают из-за наличия уравнительных токов в обмотках и вызванных ими магнитных полей. Наибольший результирующий момент получается, примерно, спустя (0,6 0,8) периода после включения, и может быть больше установившегося начального момента в 3 — 4 раза.
Процессы при выключении двигателей также заслуживают внимания. В этом случае магнитная энергия, запасенная главным образом в воздушном зазоре, после быстрого отключения двигателя делается свободной и может вызвать в обмотках повышенные напряжения. Если роторная обмотка при выключении двигателя разомкнута, то магнитное поле быстро исчезает. Магнитная энергия переходит в тепловую в искровых промежутках между расходящимися контактами выключателя. Вследствие быстрого изменения потокосцеплений обмоток в них могут возникнуть опасные перенапряжения, особенно в случае мощных двигателей. Поэтому не следует двигатель с контактными кольцами выключать при разомкнутой обмотке ротора. Пусковой реостат, следовательно, должен выполняться так, чтобы роторная цепь не могла быть разомкнутой. При выключении короткозамкнутых двигателей магнитное поле исчезает относительно медленно, так как оно будет поддерживаться наведенными им токами в роторной обмотке. Перенапряжения здесь практически не возникают.
Дата добавления: 2016-01-29; просмотров: 1062;