в) Короткозамкнутые двигатели. 5 страница
Внутренний статор 2 также собирается из лакированных листов электротехнической стали и служит для уменьшения магнитного сопротивления главному потоку, проходящему через зазор. Он насаживается на цилиндрический выступ щита.
Полый ротор 3 представляет собой тонкостенный стакан, выполняемый обычно из алюминиевого сплава. Дно стакана жестко укрепляется на валу 7. Толщина его стенки колеблется от 0,2 до 1 мм. Такой ротор имеет очень небольшой момент инерции, что во многих случаях и требуется от исполнительного двигателя.
Зазором в двигателе следует считать зазор между внешним и внутренним статорами. Он относительно велик: 0,5 — 1,5 мм. Вследствие этого возрастают намагничивающие токи обмоток, что приводит к увеличению электрических потерь в них. Кроме того, большие электрические потери возникают в роторе. Поэтому к.п.д. рассматриваемого двигателя имеет низкие значения. Из-за больших потерь приходится увеличивать размеры двигателя, чтобы получились достаточные поверхности охлаждения.
Вращающий момент двигателя создается в результате взаимодействия вращающегося поля и вихревых токов, наведенных им в цилиндрической части ротора. С некоторым приближением можно контуры вихревых токов заменить эквивалентной клеткой. Активное сопротивление r2 такой клетки получается большим, тогда как ее индуктивное сопротивление х2 невелико: х2  (0,05 0,1)r2. При этих условиях в большой степени удовлетворяются указанные требования, предъявляемые к исполнительному двигателю.
(0,05 0,1)r2. При этих условиях в большой степени удовлетворяются указанные требования, предъявляемые к исполнительному двигателю.
В качестве исполнительного двигателя применяется также асинхронный двигатель с ферромагнитным полым ротором. Такой ротор выполняется в виде полого цилиндра из стали при толщине его стенки от 0,5 до 3 мм. Здесь внутренний статор не требуется, так как поток будет проходить по стенкам цилиндра. На торцах ротора укрепляются диски. Сквозь центральные отверстия дисков проходит жестко связанный с ними вал. Следовательно, конструкция получается более простой, чем в предыдущем случае.
Выполнение его обмоток статора и схемы их включения такие же, как у двигателя с немагнитным полым ротором (рис. 3-98).
Воздушный зазор между статором и ротором в рассматриваемом двигателе берется небольшой (0,2 — 0,3 мм); однако намагничивающие токи его обмоток почти такие же, как у двигателей с немагнитным полым ротором. Объясняется это тем, что магнитная проводимость ферромагнитного полого ротора вследствие малой его толщины незначительна.
Активное сопротивление r2 такого ротора велико, так как удельное сопротивление стали значительно больше, чем меди и алюминия, и, кроме того, здесь резко сказывается эффект вытеснения тока к внешней цилиндрической поверхности ротора, особенно при большой частоте f2 = sf1.
С целью уменьшения r2 иногда производится омеднение ротора: гальваническим путем внешняя цилиндрическая поверхность ротора покрывается слоем меди толщиной 0,05 — 0,1 мм, а торцовые поверхности — слоем меди толщиной до 1 мм. Однако при этом возрастает зазор (от статора до стальной поверхности ротора). Поэтому в ряде случаев ограничиваются омеднением только торцовых поверхностей ротора.
По быстродействию двигатель уступает двигателю с немагнитным полым ротором.
Находит себе применение в качестве исполнительного двигателя и короткозамкнутый двигатель с беличьей клеткой на роторе, имеющей большое активное сопротивление. Его обмотки статора включаются также по схемам, приведенным на рис. 3-98.
Следует еще рассмотреть асинхронный двигатель с массивным ферромагнитным ротором, который применяется в качестве исполнительного, когда приходится приводить во вращение тяжелые маховые массы и когда, следовательно, собственный момент инерции двигателя имеет относительно малое значение. Характеристики этого двигателя несколько лучше, чем у двигателя с ферромагнитным полым ротором. Здесь также иногда применяется омеднение ротора.
Конструкция массивного ротора — более простая и механически значительно более прочная и надежная, чем полого ротора и ротора с беличьей клеткой, собранного из тонких листов. Этим и объясняется, что двигатели с массивным стальным ротором в настоящее время выполняются на очень большие частоты вращения (до 120000—150000 об/мин).
К недостаткам рассматриваемого двигателя, препятствующим его применению взамен обычного короткозамкнутого двигателя, следует отнести относительно низкий максимальный момент Мм из-за повышенного индуктивного сопротивления х2 ротора, большие потери в роторе и, следовательно, низкий к.п.д.
3-24. Асинхронные тахометрические генераторы
Тахометрические генераторы сокращенно называются тахогенераторами. Они служат для преобразования механического вращения в электрический сигнал (напряжение) и широко применяются в настоящее время в схемах различных автоматических устройств, в частности, для автоматизированного электропривода. Они могут также служить для измерения частоты вращения вместо обычных механических тахометров.
Наибольшее распространение из тахогенераторов переменного тока получили асинхронные тахогенераторы с немагнитным полым ротором, по выполнению не отличающиеся в основном от соответствующих исполнительных двигателей (см. рис. 3-100).
Принципиальная схема включения такого асинхронного тахогенератора показана на рис. 3-102.
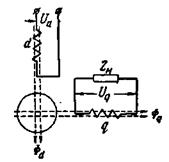
Рис. 3-102. Схема включения асинхронного тахогенератора
(к объяснению принципа действия).
Здесь также на статоре расположены две обмотки d и q, оси которых — продольная и поперечная — сдвинуты в пространстве на 90 эл. град.
К обмотке d подводится переменное напряжение Ud, имеющее постоянные амплитуду и частоту; тогда при вращении ротора тахогенератора на зажимах обмотки q возникает напряжение Uq. Это напряжение будет иметь ту же частоту, что и Ud, и практически будет изменяться пропорционально частоте вращения ротора.
Принцип действия асинхронного тахогенератора основан на следующем.
Будем считать, что к обмотке d подведено напряжение Ud = const при fi = const. Если при этом ротор неподвижен, то возникнет переменный магнитный поток, пульсирующий с частотой f1 по оси обмотки d, аналогичный потоку трансформатора при короткозамкнутой вторичной обмотке. Роль последней в тахогенераторе выполняют контуры ротора, оси которых совпадают с осью обмотки d.
Если ротор вращается, то мы можем мысленно представить себе, что контуры с продольной осью как бы неподвижны в пространстве, так как на смену одним проводникам этих контуров непрерывно поступают другие. Следовательно, как и при неподвижном роторе, в них будут наводиться продольным потоком Фd э.д.с. трансформации edт, имеющие частоту f1. Но теперь будем иметь также контуры, в которых будут наводиться э.д.с. вращения eqвр, от пересечения проводниками магнитных линий потока Фd. Оси этих контуров будут совпадать с поперечной осью, и возникшие в них токи будут создавать поперечную н.с. и, следовательно, поперечный поток Фq.
Можем принять, что э.д.с. вращения в поперечном контуре равна:
 .
.
Если сюда подставить окружную частоту ротора  , индукцию в зазоре
, индукцию в зазоре  (Ф. —амплитуда продольного потока; c1 — коэффициент пропорциональности), то получим:
(Ф. —амплитуда продольного потока; c1 — коэффициент пропорциональности), то получим:

(c2 — также коэффициент пропорциональности). Из последнего равенства следует, что э.д.с. вращения в поперечных контурах пропорциональны частоте вращения n, имеют частоту f1 и находятся или в фазе, или в противофазе с потоком Фd. Такую же частоту f1 будут иметь токи, вызванные э.д.с.  в поперечных контурах, и созданный ими поток Фq, пульсирующий по поперечной оси. Поток Фq, приблизительно пропорциональный частоте вращения n, будет наводить в поперечных контурах ротора э.д.с. трансформации
в поперечных контурах, и созданный ими поток Фq, пульсирующий по поперечной оси. Поток Фq, приблизительно пропорциональный частоте вращения n, будет наводить в поперечных контурах ротора э.д.с. трансформации  и в то же время э.д.с. Еqт в обмотке статора q.
и в то же время э.д.с. Еqт в обмотке статора q.
Электродвижущие силы будут направлены почти прямо противоположно по отношению к э.д.с. ; их результирующие будут создавать токи в поперечных контурах. Если поперечные контуры заменить эквивалентной поперечной обмоткой, приведенной к обмотке статора q, то ее можно рассматривать как первичную обмотку трансформатора, а э.д.с. вращения  такой обмотки — как подведенное к ней напряжение. Тогда Еqт — э.д.с. трансформации, наведенная потоком Фq в этой эквивалентной обмотке. Она сдвинута по фазе почти на 180 град относительно э.д.с. . Напряжение
такой обмотки — как подведенное к ней напряжение. Тогда Еqт — э.д.с. трансформации, наведенная потоком Фq в этой эквивалентной обмотке. Она сдвинута по фазе почти на 180 град относительно э.д.с. . Напряжение  найдем, если вычтем из
найдем, если вычтем из  падения напряжения в обмотке q.
падения напряжения в обмотке q.
Тот же поток Фq будет наводить э.д.с. вращения  в продольных контурах ротора, которые будут пропорциональны частоте вращения n, иметь частоту f1 и находиться в противофазе или в фазе с потоком Фq. Если также заменить продольные контуры ротора эквивалентной продольной обмоткой, приведенной к обмотке статора d, то ее можно рассматривать как обмотку трансформатора, а э.д.с. трансформации Еdт такой обмотки — как подведенное к ней напряжение. Электродвижущая сила вращения
в продольных контурах ротора, которые будут пропорциональны частоте вращения n, иметь частоту f1 и находиться в противофазе или в фазе с потоком Фq. Если также заменить продольные контуры ротора эквивалентной продольной обмоткой, приведенной к обмотке статора d, то ее можно рассматривать как обмотку трансформатора, а э.д.с. трансформации Еdт такой обмотки — как подведенное к ней напряжение. Электродвижущая сила вращения  , наведенная потоком Фq в этой эквивалентной продольной обмотке, будет сдвинута по фазе относительно э.д.с.
, наведенная потоком Фq в этой эквивалентной продольной обмотке, будет сдвинута по фазе относительно э.д.с.  почти на 180 град. Напряжение
почти на 180 град. Напряжение  будет иметь составляющую — Edт и составляющие, равные падениям напряжения в обмотке d.
будет иметь составляющую — Edт и составляющие, равные падениям напряжения в обмотке d.
Количественные соотношения, определяющие напряжение при заданных напряжении и частоты вращения n могут быть найдены из решения комплексных уравнений, составленных на основе представленной выше физической картины процессов в тахогенераторе.
Путем подбора параметров тахогенератора и внешней нагрузки Zн удается свести его погрешности до очень малых значений. Под погрешностями здесь понимаются отклонение зависимости Uq = f(n) от линейной и отклонение сдвига между и от 90 град.
3-25. Асинхронный преобразователь частоты
Электрическую энергию на заводах, фабриках, при строительных работах, в шахтах, сельском хозяйстве обычно получают от сети трехфазного тока нормальной частоты 50 Гц. Для преобразования тока в другую частоту может быть использован асинхронный преобразователь частоты, представляющий собой асинхронную машину с контактными кольцами, приводимую во вращение каким-либо двигателем. Приводным двигателем обычно служит короткозамкнутый асинхронный двигатель.
Асинхронные преобразователи частоты широко применяются для повышения частоты тока, например, в тех случаях, когда для питания быстроходных асинхронных двигателей требуется ток более высокой частоты, чем 50 Гц. Другие агрегаты для преобразования частоты тока (например, синхронный генератор с приводным двигателем) в тех же случаях оказываются более дорогими, особенно при небольших мощностях.
На рис. 3-103 представлена принципиальная схема включения асинхронного преобразователя частоты. Обмотка статора преобразователя (П) приключается к первичной сети нормальной частоты f1, а его обмотка ротора через посредство контактных колец и щеток — ко вторичной сети частоты f2. Приводной двигатель (Д) также приключается к первичной сети.
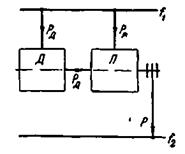
Рис. 3-103. Схема включения асинхронного преобразователя частоты.
Для повышения частоты (f2 > fi) ротор преобразователя приводится во вращение против поля. Тогда э.д.с. E2s = sпE2, наведенная в его обмотке, будет иметь частоту f2 = sпf1 > fi, так как при вращении против поля скольжение преобразователя sп > l.
Полная электрическая мощность Рэ2 цепи ротора при s > l складывается из мощности Рэм, перенесенной вращающимся полем со статора на ротор, и мощности  , полученной в результате преобразования механической мощности, подведенной к преобразователю со стороны двигателя.
, полученной в результате преобразования механической мощности, подведенной к преобразователю со стороны двигателя.
В соответствии с известными соотношениями [см. (3-69) и (3-70а)] можем написать:
 и
и  . (3-241)
. (3-241)
Если двигатель имеет рд пар полюсов, а преобразователь рп пар полюсов, то скольжение преобразователя
 , (3-242)
, (3-242)
где n1 — частота вращения поля преобразователя;
n2 — частота вращения его ротора (скольжением двигателя пренебрегаем).
Допустим, что в машинах нет потерь. Тогда будем иметь (рис. 3-103) Рэ2 = Р (мощности вторичной сети); Рэм = Рп (мощности преобразователя) и = Рд (мощности двигателя). Соотношения между указанными мощностями получим, подставив (3-242) в (3-241):
 и
и  . (3-243)
. (3-243)
Если преобразователь служит, например, для преобразования тока частоты f1 =50 Гц в ток частоты f2 = 150 Гц, то его скольжение sп = f2/f1 = 3, что согласно (3-242) можно получить при рд = 1 и рп = 2; тогда по (3-243) Рп = 0,33Р и Рд = 0,67Р.
Действительные мощности, потребляемые преобразователем и двигателем из первичной сети, будут из-за потерь больше примерно на 25 — 35% для преобразователей небольшой мощности (5 — 30 кВА при cosφ2 = 0,8  0,75). Следует также учитывать, что через вал к преобразователю подводится только активная мощность, тогда как реактивная мощность для вторичной сети и для самого преобразователя подводится через его статор.
0,75). Следует также учитывать, что через вал к преобразователю подводится только активная мощность, тогда как реактивная мощность для вторичной сети и для самого преобразователя подводится через его статор.
К недостаткам асинхронного преобразователя частоты следует отнести довольно большое падение напряжения U2 на его вторичных зажимах при переходе от холостого хода к номинальной нагрузке (до 10 — 30% при cosφ2 = 1 0,7). Регулирование U2 здесь возможно путем изменения U1 на первичных зажимах, что на практике применяется очень редко.
В большинстве случаев нагрузку преобразователя со вторичной стороны составляют асинхронные двигатели. Тогда при переходе этих двигателей от работы вхолостую к работе с нагрузкой изменение U2 будет небольшим в соответствии с небольшим изменением потребляемой ими реактивной мощности.
При изготовлении асинхронных преобразователей частоты могут быть использованы части нормальных (серийных) асинхронных двигателей с контактными кольцами. Однако при этом следует иметь в виду, что частота перемагничивания ротора велика (f2 = sпf1). Поэтому необходимо существенно снизить значения индукции в его зубцах и ярме.
Для преобразователя можем написать следующие уравнения напряжений и токов:

 ;
;
 ;
;
 ,
,
где  ,
,  и X' — приведенные к обмотке статора вторичное напряжение и сопротивления нагрузки преобразователя. Этим уравнениям соответствует диаграмма пpeoбpaзoвaтeля, работающего с нагрузкой, представленная на рис. 3-104.
и X' — приведенные к обмотке статора вторичное напряжение и сопротивления нагрузки преобразователя. Этим уравнениям соответствует диаграмма пpeoбpaзoвaтeля, работающего с нагрузкой, представленная на рис. 3-104.
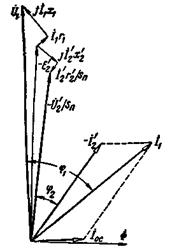
Рис. 3-104. Векторная диаграмма асинхронного преобразователя частоты.
3-26. Поворотные автотрансформаторы
Поворотным автотрансформатором (применяется также название «индукционный регулятор») будем называть асинхронную машину, работающую с заторможенным ротором в качестве автотрансформатора и позволяющую путем поворота ротора регулировать напряжение на ее вторичных зажимах.
В трехфазном поворотном автотрансформаторе на роторе помещается трехфазная обмотка с выведенными концами в виде гибких проводников, соединенных с обмоткой статора и позволяющих поворачивать ротор на углы в пределах от 0 до 180 эл. град. Обычная его схема приведена на рис. 3-105.
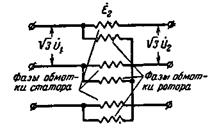
Рис. 3-105. Схема трехфазного поворотного автотрансформатора.
Обмотка ротора здесь служит первичной обмоткой. Она соединена в звезду (может быть соединена и треугольником). Обмотка статора служит добавочной обмоткой. На ее вторичных зажимах получается регулируемое напряжение  .
.
Можно также в качестве первичной обмотки использовать обмотку статора, а в качестве добавочной — обмотку ротора. Тогда от последней должно быть выведено шесть гибких проводников.
Иногда на практике в качестве трехфазного поворотного автотрансформатора используется машина с контактными кольцами, предназначенная для работы двигателем. В этом случае обычно приходится заменять обмотки ротора и статора другими обмотками с числами витков (на фазу), соответствующими напряжению U1 и заданным пределам регулирования напряжения U2.
При холостом ходе поворотного автотрансформатора ток будет проходить только по обмотке ротора, которая создает при этом вращающееся магнитное поле. Это поле будет наводить в обмотках э.д.с.  и
и  . Электродвижущая сила E1, обмотки ротора будет почти полностью уравновешивать напряжение
. Электродвижущая сила E1, обмотки ротора будет почти полностью уравновешивать напряжение  (U1
(U1  ). Электродвижущая сила обмотки статора будет складываться с напряжением ( ; следовательно, вторичное напряжение
). Электродвижущая сила обмотки статора будет складываться с напряжением ( ; следовательно, вторичное напряжение  . Поворачивая ротор по вращению или против вращения поля, мы будем изменять взаимное расположение осей обмоточных фаз статора и ротора и, следовательно, фазу э.д.с. относительно фазы напряжения . В соответствии с этим, как показано на рис. 3-106, будет изменяться напряжение U2 от U2макс = U1 + E2 до U2мин = U1 — Е2. При нагрузке напряжение U2 будет несколько отличаться от соответствующего напряжения при холостом ходе вследствие падений напряжения в обмотках статора и ротора.
. Поворачивая ротор по вращению или против вращения поля, мы будем изменять взаимное расположение осей обмоточных фаз статора и ротора и, следовательно, фазу э.д.с. относительно фазы напряжения . В соответствии с этим, как показано на рис. 3-106, будет изменяться напряжение U2 от U2макс = U1 + E2 до U2мин = U1 — Е2. При нагрузке напряжение U2 будет несколько отличаться от соответствующего напряжения при холостом ходе вследствие падений напряжения в обмотках статора и ротора.
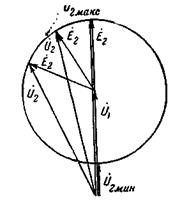
Рис. 3-106. Диаграмма напряжений трехфазного поворотного автотрансформатора, работающего вхолостую, при различных положениях ротора относительно статора.
Поворотный автотрансформатор в отношении охлаждения работает в более тяжелых условиях, чем асинхронный двигатель. Небольшие поворотные автотрансформаторы выполняются с воздушным охлаждением. При большой мощности иногда применяется масляное охлаждение, так же как для масляных трансформаторов.
Для поворота ротора обычно используется червячная передача, причем она должна быть механически достаточно прочной, так как вращающий момент, действующий на ротор при нагрузке поворотного автотрансформатора, достигает больших значений.
Трехфазные поворотные автотрансформаторы применяются в лабораториях, в схемах автоматики и иногда для регулирования напряжения в распределительных сетях.
На практике находят себе применение также однофазные поворотные автотрансформаторы. Обычная схема такого автотрансформатора представлена на рис. 3-107.
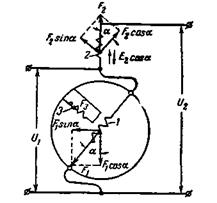
Рис. 3-107. Схема однофазного поворотного автотрансформатора.
Здесь однофазная обмотка ротора 1 является первичной обмоткой; обмотка статора 2 — добавочной обмоткой. При отсутствии тока в обмотке статора (холостой ход) н.с. создается только обмоткой ротора 1. Ее можно заменить по отношению к оси обмотки статора двумя н.с.: продольной F1cos  и поперечной F1sin , где — угол между осями обмоток 1 и 2. Очевидно, что в обмотке статора будет наводиться э.д.с. полем, созданным только продольной н.с. F1cos . Эта э.д.с., следовательно, может быть принята равной F2cos . При = 0 получается максимальная э.д.с. Е2, при = 90 эл. град она равна нулю, при дальнейшем увеличении сверх 90 эл. град э.д.с. меняет фазу и при 180 эл. град становится равной — Е2. Поэтому при холостом ходе U2 = U1 + F2cos ; предельные значения: U2макс = U1 + E2 и U2мин = U1 - E2. При нагрузке одновременно с возрастанием тока в статорной обмотке будет возрастать ток в обмотке ротора 1, чтобы результирующая н.с., действующая по оси обмотки 1, создавала поле, необходимое для получения в этой обмотке э.д.с. Е1, почти равной Ui(
и поперечной F1sin , где — угол между осями обмоток 1 и 2. Очевидно, что в обмотке статора будет наводиться э.д.с. полем, созданным только продольной н.с. F1cos . Эта э.д.с., следовательно, может быть принята равной F2cos . При = 0 получается максимальная э.д.с. Е2, при = 90 эл. град она равна нулю, при дальнейшем увеличении сверх 90 эл. град э.д.с. меняет фазу и при 180 эл. град становится равной — Е2. Поэтому при холостом ходе U2 = U1 + F2cos ; предельные значения: U2макс = U1 + E2 и U2мин = U1 - E2. При нагрузке одновременно с возрастанием тока в статорной обмотке будет возрастать ток в обмотке ротора 1, чтобы результирующая н.с., действующая по оси обмотки 1, создавала поле, необходимое для получения в этой обмотке э.д.с. Е1, почти равной Ui(  ). Для компенсации н.с. F2sin на роторе должна быть помещена короткозамкнутая обмотка 3, ось которой перпендикулярна к оси обмотки 1. При отсутствии обмотки 3 н.с. F2sinα вызвала бы сильное поле, которое обусловило бы большое индуктивное падение напряжения в обмотке 2.
). Для компенсации н.с. F2sin на роторе должна быть помещена короткозамкнутая обмотка 3, ось которой перпендикулярна к оси обмотки 1. При отсутствии обмотки 3 н.с. F2sinα вызвала бы сильное поле, которое обусловило бы большое индуктивное падение напряжения в обмотке 2.
Здесь также возможно первичную обмотку поместить на статоре, а добавочную — на роторе. В этом случае короткозамкнутая обмотка для компенсации поперечной н.с. ротора помещается на статоре; ось ее должна быть сдвинута на 90 эл. град относительно оси обмотки статора.
Однофазные поворотные автотрансформаторы на практике применяются сравнительно редко и выполняются обычно на небольшие мощности.
3-27. Поворотные трансформаторы
Асинхронная машина при заторможенном роторе может быть использована в качестве преобразователя m1-фазного тока в m2-фазный ток: например, трехфазного тока в пяти- или семифазный ток Для этого ее обмотки статора и ротора должны быть выполнены соответственно на m1 и m2 фаз. Машина будет работать как трансформатор, в котором энергия со статора на ротор будет передаваться вращающимся полем. Такие преобразователи применяются крайне редко и только для специальных целей.
На практике нашли себе применение поворотные трансформаторы, выполняемые так же, как асинхронные машины, и имеющие устройство, позволяющее поворачивать их ротор. Рассмотрим сначала машину, которая со стороны статора получает питание от сети трехфазного тока. Если к зажимам ее статора подводится постоянное напряжение, то при повороте ротора на зажимах его обмотки будем получать напряжение, изменяющееся только по фазе. Такие поворотные трансформаторы называются фазорегуляторами и применяются, например, для регулирования фазы сеточного напряжения ртутного выпрямителя или тиратрона и в измерительной технике, причем в последнем случае главным образом для поверки ваттметров и счетчиков (рис 3-108).
Рис. 3-108. Поворотный трансформатор для поверочных устройств.
На рис. 3-109 показана принципиальная схема поверки счетчика переменного тока с применением поворотного трансформатора.
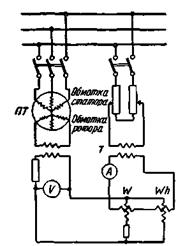
Рис. 3-109. Принципиальная схема поверки счетчика при помощи поворотного трансформатора (ПТ).
Здесь цепи тока и напряжения поверяемого счетчика Wh и контрольного ваттметра W питаются от общей сети, но через два различных трансформатора, причем цепи напряжения приключены к зажимам ротора поворотного трансформатора. Поворот ротора будет вызывать изменение фазы напряжения на зажимах счетчика и ваттметра, значение же напряжения при этом не будет изменяться. Приведенная схема позволяет получать любой сдвиг фаз между напряжением параллельных цепей счетчика и ваттметра и током их последовательных цепей.
Подобные способы поверки, при которых цепи напряжения и тока измерительных приборов независимы одна от другой, носят название способов фиктивной нагрузки, так как в этих случаях измерительные приборы учитывают фиктивную мощность, равную произведению тока, напряжения и cosφ двух различных цепей.
В схемах автоматических устройств (например, счетно-решающих) нашли себе широкое применение поворотные трансформаторы малой мощности. К ним обычно подводится питание со стороны статора от источника однофазного тока. При этом на обмотке ротора (на выходе) требуется получить напряжение, представляющее собой определенную функцию угла поворота ротора α. Обычно требуется, чтобы это напряжение было пропорционально sinα, cosα или было связано с углом α линейной зависимостью. В соответствии с этим различают синусные, косинусные, синус-косинусные и линейные поворотные трансформаторы.
Дата добавления: 2016-01-29; просмотров: 995;