Б) Многофазная обмотка.
Вначале найдем н.с. трехфазной обмотки. Она может быть найдена графически, путем сложения н.с. отдельных фаз с учетом пространственного сдвига осей фаз и сдвига во времени их токов.
На рис. 3-27 слева показано сложение первых гармоник н.с. фаз трехфазной обмотки для отдельных моментов времени.
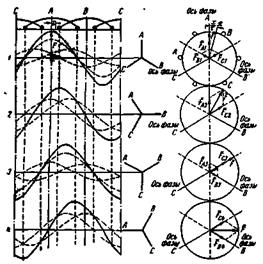
Рис. 3-27. Намагничивающая сила трехфазной обмотки.
В результате сложения получается синусоидально распределенная н.с. с неизменной амплитудой, в 1,5 раза большей максимальной амплитуды н.с. фазы:
 . (3-52)
. (3-52)
К тому же результату можно прийти, рассматривая синусоидально распределенную н.с. каждой фазы как пространственный вектор, выходящий из центра внутренней окружности статора и совпадающий с осью данной фазы. Пространственные векторы пульсирующих н.с. фаз обмотки  ,
,  ,
,  (n=l, 2, 3, 4) показаны на рис. 3-27 справа. Их мгновенные значения и направления соответствуют мгновенным значениям и направлениям токов в фазах обмотки. Складывая векторы н.с. , , для отдельных моментов времени, получим результирующий пространственный вектор
(n=l, 2, 3, 4) показаны на рис. 3-27 справа. Их мгновенные значения и направления соответствуют мгновенным значениям и направлениям токов в фазах обмотки. Складывая векторы н.с. , , для отдельных моментов времени, получим результирующий пространственный вектор  , неизменный по величине, но вращающийся в определенном направлении.
, неизменный по величине, но вращающийся в определенном направлении.
Мы видим, что вектор результирующей н.с. вращается в направлении от A к В и к С. При этом амплитуда н.с. совпадает с осью той фазы, ток которой в данный момент времени имеет максимальное значение. Положительные максимальные значения токов в фазах устанавливаются сначала в фазе А, затем в фазе В и, наконец, в фазе С. Этим определяются порядок чередования фаз и направление вращения амплитуды результирующей н.с.
Изменив порядок чередования фаз путем перемены мест двух проводов, подводящих ток к обмотке статора асинхронного двигателя, мы изменим направление вращения н.с. и создаваемого ею поля, а следовательно, направление, вращения ротора двигателя.
Из рис. 3-27 видно, что за четверть периода изменения тока результирующая н.с. пройдет 0,5t, а за период — 2t. Следовательно, ее линейная скорость перемещения v1 = 2tf1, а частота вращения, об/мин,
 . (3-53)
. (3-53)
То же самое в общем виде можно доказать, обращаясь к аналитическим выражениям н.с. отдельных фаз. Для этого найдем н.с. фаз A, В, С в точке, сдвинутой на х относительно оси фазы А (рис. 3-27). Фаза А создает в этой точке н.с.
 , (3-54)
, (3-54)
Так как токи в фазах В и С относительно тока в фазе А сдвинуты по фазе (во времени) на углы  и
и  рад, а оси фаз В к С относительно оси фазы А сдвинуты на и эл. рад., то н.с. фаз В и С в тот же момент времени в рассматриваемой точке равны:
рад, а оси фаз В к С относительно оси фазы А сдвинуты на и эл. рад., то н.с. фаз В и С в тот же момент времени в рассматриваемой точке равны:
 ; (3-55)
; (3-55)
 . (3-56)
. (3-56)
Если сложить найденные значения н.с., заменив при этом каждую пульсирующую н.с. двумя вращающимися в разные стороны (3-41):
 (3-57)
(3-57)
то получим результирующую н.с.
 , (3-58)
, (3-58)
где сумма вторых слагаемых (3-57) равна нулю, так как они представляют собой синусоиды с равными амплитудами, сдвинутые на и рад.
Уравнение (3-58) — уравнение бегущей волны, перемещающейся с частотой v1 = 2tf1 или вращающейся с частотой  [ср. с (3-42) и (3-44)].
[ср. с (3-42) и (3-44)].
Таким образом, мы доказали, что результирующая н.с. трехфазной обмотки при наличии в ней трехфазного тока является н.с. с неизменной амплитудой , вращающейся с частотой n1.
Если стальные участки магнитной цепи ненасыщены, то кривая н.с. в другом масштабе дает нам кривую поля машины, которая, так же как и кривая н.с., вращается при неизменной амплитуде с частотой п1. Такое поле называется круговым вращающимся полем.
В общем случае симметричная m-фазная обмотка при наличии в ней симметричного m-фазного тока создает вращающуюся н.с. с постоянной амплитудой
 , (3-59)
, (3-59)
которую аналогично предыдущему можно найти графически или аналитически путем сложения н.с. отдельных фаз.
Уравнения (3-58) и (3-59) получены для первых гармоник н.с. Они и используются в общей теории машин при определении их рабочих свойств, высшими гармониками при этом пренебрегают, так как амплитуды их незначительны.
Однако для более подробного изучения свойств машин необходимо выяснить, от чего зависят амплитуды высших гармоник н.с. обмоток и с какой частотой они вращаются относительно статора или ротора.
Обратимся к трехфазной обмотке, синусоидальные токи которой образуют симметричную трехфазную систему, и будем при определении ν-й гармоники ее н.с. в точке x (рис. 3-27) учитывать, что по фазе (во времени) ν-е гармоники н.с. фаз В и С сдвинуты относительно v-й гармоники н.с. фазы А на углы и , так же как соответствующие токи в фазах обмотки, и что оси фаз B и С сдвинуты относительно оси фазы А на углы  и
и  эл. рад. (для ν-й гармоники t соответствует νπ эл. рад). Следовательно ν-ю гармонику н.с. трехфазной обмотки в точке х получим как сумму ν-х гармоник н.с. фаз в той же точке, выражения для которых в соответствии с (3-48) и (3-49) имеют следующий вид:
эл. рад. (для ν-й гармоники t соответствует νπ эл. рад). Следовательно ν-ю гармонику н.с. трехфазной обмотки в точке х получим как сумму ν-х гармоник н.с. фаз в той же точке, выражения для которых в соответствии с (3-48) и (3-49) имеют следующий вид:
 ;
;


Приведенные равенства позволяют сделать следующие выводы.
1. В кривой результирующей н.с. трехфазной обмотки все гармоники с номером, кратным трем, пропадают. В этом мы можем убедиться, обращаясь к первой форме выражения для ν-х гармоник н.с. фаз (произведение синуса на косинус). Для всех трех фаз мы будем иметь косинусы одного и того же угла  ; сумма же синусоид, сдвинутых на углы и и имеющих одинаковые амплитуды, равна нулю.
; сумма же синусоид, сдвинутых на углы и и имеющих одинаковые амплитуды, равна нулю.
2. Все гармоники с номером ν = 6а—1, где а — любое целое число (1, 2, 3, ...), при сложении дают ν-ю гармонику, вращающуюся с частотой  , т. е. против вращения первой гармоники. В этом мы можем убедиться, обращаясь ко второй форме выражения для ν-х гармоник н.с. фаз (сумма синусов). Подставляя здесь ν = 5, 11, 17 и т. д., мы получим.
, т. е. против вращения первой гармоники. В этом мы можем убедиться, обращаясь ко второй форме выражения для ν-х гармоник н.с. фаз (сумма синусов). Подставляя здесь ν = 5, 11, 17 и т. д., мы получим.
 ,
,
откуда видим, что ν-я гармоника вращается с частотой [ср. с (3-58)].
3. Все гармоники результирующей н.с. с номером ν = 6a + 1 вращаются c частотой  в ту же сторону, что и первая гармоника. В этом случае имеем:
в ту же сторону, что и первая гармоника. В этом случае имеем:
 .
.
4. Поля, созданные высшими гармониками н.с. обмотки, будут наводить в этой обмотке э.д.с той же частоты, что и частота э.д.с., наведенной первой гармоникой поля. Действительно, ν-я гармоника вращается с частотой  , но она имеет число пар полюсов νр, следовательно, частота наведенной ею э.д.с. равна
, но она имеет число пар полюсов νр, следовательно, частота наведенной ею э.д.с. равна  . Очевидно, получится тот же результат, если учесть, что потокосцепление фазы обмотки, созданное токами частоты f1 будет во времени изменяться также с частотой f1.
. Очевидно, получится тот же результат, если учесть, что потокосцепление фазы обмотки, созданное токами частоты f1 будет во времени изменяться также с частотой f1.
При несимметричной системе токов в фазах трехфазной симметричной обмотки определяются н.с., созданные каждой из симметричных составляющих данной системы токов. Токи прямой и обратной последовательностей создадут круговые н.с , вращающиеся в разные стороны. Результирующей этих н.c. будет эллиптическая вращающаяся н.с., т. е. пространственный вектор результирующей н.с. будет описывать эллипс. Для определения н.с., созданной токами нулевой последовательности, обратимся к предыдущим выражениям для н.с. отдельных фаз. Так как токи нулевой последовательности равны между собой и совпадают по фазе, то эти выражения будут иметь следующий вид:
 ;
;
 ;
;
 .
.
Складывая приведенные значения н.с. отдельных фаз, получим результирующую н.с. Ftxv в точке х. Для всех значений ν, не кратных трем, Ftxv = 0; для значений ν, кратных трем,
 .
.
Следовательно, токи нулевой последовательности будут создавать пульсирующую н.с. с пространственным периодом  , где ν = 3, 9, 15 и т. д. Для исследования ее действия она может быть заменена двумя круговыми н.с. с тем же пространственным периодом, вращающимися в разные стороны и имеющими половинную амплитуду.
, где ν = 3, 9, 15 и т. д. Для исследования ее действия она может быть заменена двумя круговыми н.с. с тем же пространственным периодом, вращающимися в разные стороны и имеющими половинную амплитуду.
3-5. Принцип действия асинхронного двигателя и его энергетическая диаграмма
Для лучшего понимания принципа действия асинхронного двигателя вначале примем, что его вращающееся поле создается путем вращения двух полюсов (постоянных магнитов или электромагнитов), как показано на рис. 3-28.
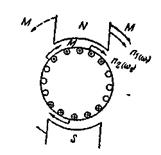
Рис. 3-28. К пояснению принципа действия асинхронного двигателя.
В проводниках замкнутой обмотки ротора при этом будут наводиться токи. Их направления указаны на рис. 3-28. Они найдены по правилу правой руки, позволяющему определить направление наведенного тока в проводнике, перемещающемся относительно поля. Пользуясь правилом левой руки, найдем направления электромагнитных сил, действующих на ротор и заставляющих его вращаться. Ротор двигателя будет вращаться в направлении вращения поля. Его частота вращения п2, об/мин, будет меньше частоты вращения поля n1, об/мин, так как только в этом случае возможны наведение токов в обмотке ротора и возникновение электромагнитных сил и вращающего момента.
Частота вращения поля n1 называется синхронной частотой вращения.
Скорость поля относительно ротора (n1 – n2) называется частотой скольжения, а отношение этой частоты к частоте поля, обозначаемое через s,
 (3-60)
(3-60)
называется скольжением.
Обозначим через М вращающий момент, который нужно приложить к полюсам (рис. 3-28), чтобы вращать их c частотой n1, об/мин, или с угловой частотой, рад/с,
 . (3-61)
. (3-61)
Тогда мощность, необходимая для вращения полюсов,
 . (3-62)
. (3-62)
На ротор и полюсы действуют одинаковые электромагнитные силы (действие равно противодействию). Они создают одинаковые вращающие моменты, а так как момент, действующий на полюсы (на рис. 3-28 показан пунктирной стрелкой), равен М, той и на ротор действует момент М. Следовательно, механическая мощность, развиваемая ротором,
 , (3-63)
, (3-63)
где угловая частота ротора, рад/с,
 . (3-64)
. (3-64)
При работе машины двигателем  <
<  , так как ω2< ω1.
, так как ω2< ω1.
Можно считать, что разность мощностей и равна только электрическим потерям в обмотке ротора, имеющей m2 фаз при токе в фазе I2 и ее активном сопротивлении r2, так как потерями в стали ротора, как будет показано, можно пренебречь:
 . (3-65)
. (3-65)
Мощность Рэм передается вращающимся полем ротору. Она называется электромагнитной мощностью или мощностью вращающегося поля.
В реальной асинхронной машине, работающей двигателем, электромагнитная мощность Рэм равна первичной мощности Р1, подведенной к статору, за вычетом Рэ1 электрических потерь в обмотке статора
 (3-66)
(3-66)
(m1— число фаз; I1 — ток в фазе обмотки статора, r1, — ее активное сопротивление) и потерь в стали статора Pc1, т. е.
 , (3-67)
, (3-67)
Механическая мощность на валу двигателя P2 (полезная мощность) меньше механической мощности , развиваемой ротором. Чтобы получить Р2, нужно вычесть из механические потери Pмех на трение в подшипниках и вращающихся частей о воздух, потери Рс.д в зубцах статора и ротора, вызываемые пульсациями поля в них, и небольшие добавочные потери Pдоб, возникающие при нагрузке и вызываемые полями рассеяния статора и ротора:
 . (3-68)
. (3-68)
Наглядное представление о распределении мощностей в асинхронном двигателе дает его энергетическая диаграмма, приведенная на рис. 3-29.
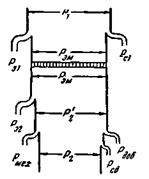
Рис. 3-29. Энергетическая диаграмма асинхронного двигателя.
Она соответствует уравнениям (3-67) и (3-68).
Из написанных ранее соотношений (3-62), (3-63) и (3-65) следует:
 , (3-69)
, (3-69)
так как
 .
.
(В равенствах  угловая механическая скорость является постоянной при f1 = const; поэтому Pэм
угловая механическая скорость является постоянной при f1 = const; поэтому Pэм  M, что дало повод назвать величину Рэм "моментом в синхронных ваттах".) Из (3-69) получаем
M, что дало повод назвать величину Рэм "моментом в синхронных ваттах".) Из (3-69) получаем
 (3-70)
(3-70)
или
 . (3-70а)
. (3-70а)
Если скольжение выразить в процентах, то можно написать, что s% от мощности Pэм, полученной ротором от статора через посредство вращающегося поля, расходуется в обмотке ротора на электрические потери [см (3-69)], а оставшаяся часть, равная (1— s) 100% от Pэм, преобразуется в механическую мощность (3-70), развиваемую ротором. Поэтому асинхронные двигатели выполняются таким образом, чтобы их скольжение было невелико. Оно для нормальных двигателей мощностью от 1 до 1 000 кВт при их номинальной нагрузке составляет приблизительно 6  1%; при больших мощностях обычно s<l%.
1%; при больших мощностях обычно s<l%.
Частота вращения поля (синхронная частота) определяется, как указывалось, по формуле (3-53):
, (3-71)
где f — частота тока статора;
р — число пар полюсов его обмотки.
При стандартной в СССР частоте f = 50 Гц синхронные частоты вращения для различных чисел полюсов имеют значения, приведенные в табл. 3-3.
Таблица 3-3
| 2p | ||||||||||
| n1 |
Частота вращения ротора согласно (3-60), об/мин,
 . (3-72)
. (3-72)
Номинальная частота вращения n2н, получающаяся при номинальной нагрузке на валу, указывается на щитке двигателя. Она в обычных случаях позволяет определить синхронную частоту вращения, число полюсов двигателя и его номинальное скольжение sн.
Например, на щитке двигателя, предназначенного для работы при частоте тока f1=50 Гц, указана частота вращения n2н = 730 об/мин. Ближайшая синхронная частота вращения равна 750 об/мин (табл. 3-3), чему соответствует число полюсов 2р = 8.
Скольжение
 .
.
При работе машины в обмотке ее ротора наводится э.д.с.
 , (3-73)
, (3-73)
где w2 и k02 — число витков и обмоточный коэффициент обмотки ротора;
 (3-74)
(3-74)
— частота э.д.с. и тока в обмотке ротора. С такой же частотой будет перемагничиваться сталь ротора. При работе машины двигателем частота f2 мала (при fi = 50 Гц f2 = 0,5 3-Гц), поэтому магнитными потерями в стали ротора можно пренебречь, что и было сделано при построении энергетической диаграммы на рис. 3-29.
3-6. Режимы работы машин двигателем, тормозом и генератором
Асинхронная машина при изменении скольжения от 1 до 0 работает как двигатель. В этом случае электромагнитная мощность Pэм передается магнитным полем со статора ротору и частично преобразуется в механическую мощность частично — в электрическую мощность Рэ2 = sРэм. При работе машины двигателем сдвиг между э.д.с.  , наведенной в фазе обмотки статора, и током в этой фазе
, наведенной в фазе обмотки статора, и током в этой фазе  больше 90°, так же как для первичной обмотки трансформатора.
больше 90°, так же как для первичной обмотки трансформатора.
Исходя из полученных ранее соотношений между мощностями асинхронной машины, можно показать, что при изменении скольжения от s = l до s = ∞  машина работает как тормоз. Скольжение s>l получается при вращении ротора против поля. При этом электрические потери в цепи ротора Рэ2 = sРэм будут больше мощности Pэм и, следовательно, только частично покрываются за счет Рэм, передаваемой полем со статора ротору. Другая часть электрических потерь в цепи ротора (s-1)Рэм покрывается за счет механической мощности, приложенной к ротору. Механическая мощность ротора будет отрицательной. Это значит, что она не отдается ротором, а подводится к нему и преобразуется в электрические потери в цепи ротора, т. е. поглощается в самой машине. Поэтому режим работы при s>l называется тормозным режимом.
машина работает как тормоз. Скольжение s>l получается при вращении ротора против поля. При этом электрические потери в цепи ротора Рэ2 = sРэм будут больше мощности Pэм и, следовательно, только частично покрываются за счет Рэм, передаваемой полем со статора ротору. Другая часть электрических потерь в цепи ротора (s-1)Рэм покрывается за счет механической мощности, приложенной к ротору. Механическая мощность ротора будет отрицательной. Это значит, что она не отдается ротором, а подводится к нему и преобразуется в электрические потери в цепи ротора, т. е. поглощается в самой машине. Поэтому режим работы при s>l называется тормозным режимом.
Электромагнитный момент при этом действует на ротор в направлении вращения поля, т. е. против вращения ротора; следовательно, он является тормозящим по отношению к внешнему моменту, приложенному к валу машины.
Можно также показать, что при отрицательных скольжениях асинхронная машина работает генератором. При < 0 ротор вращается в направлении вращения поля, но с частотой, превышающей частоту поля (n2 > n1). В этом случае электромагнитная мощность Рэм будет отрицательной, что следует из равенства
 . (3-75)
. (3-75)
Мощность Рэм при отрицательном скольжении передается полем с ротора статору. Механическая мощность Р'2 при этом будет также отрицательной, что следует из равенства
 . (3-76)
. (3-76)
Механическая мощность, следовательно, приложена к ротору. Часть ее идет на покрытие электрических потерь Рэ2 в цепи ротора, другая часть преобразуется в электромагнитную мощность Рэм, передаваемую полем статору. При работе машины генератором сдвиг между и меньше 90° (§ 3-12), так же как для вторичной обмотки трансформатора.
На рис. 3-30 приведена шкала скольжений для режимов генератора, двигателя и тормоза. Указанные режимы работы асинхронной машины и их использование для практических целей более подробно будут рассмотрены в последующем.
 Рис. 3-30. Шкала скольжений для режимов генератора, двигателя и тормоза.
Рис. 3-30. Шкала скольжений для режимов генератора, двигателя и тормоза.
3-7. Аналогия с трансформатором
Между обмотками статора и ротора асинхронной машины, как отмечалось, существует только магнитная связь; здесь энергия из одной обмотки в другую передается через посредством магнитного поля.
В последующем будет показано, что при любом скольжении машины н.с. обмоток статора и ротора вращаются относительно статора с одной и той же частотой и, следовательно, неподвижны одна относительно другой. Поле в машине создается их совместным действием.
Примем, так же как для трансформатора, что в асинхронной машине при ее работе имеют место основное поле и поле рассеяния. Индукционные линии основного поля проходят через воздушные зазоры, зубцы и ярма статора и ротора и сцепляются с обеими обмотками — статорной и роторной. Этому полю соответствует главный поток Ф в воздушном зазоре.
Индукционные линии полей рассеяния проходят между стенками пазов, вокруг лобовых частей обмоток и между коронками зубцов (§ 3-16). Так как магнитные сопротивления для потоков индукционных трубок рассеяния определяются в основном воздушными промежутками, то в первом приближении их можно принять постоянными и в соответствии с этим считать постоянными индуктивности рассеяния обмоток статора и ротора Lσ1 и Lσ2 (как для первичной и вторичной обмоток трансформатора).
Главный поток Ф наводит в обмотке статора э.д.с.
 (3-77)
(3-77)
и в обмотке ротора, вращающегося относительно поля со скольжением s, э.д.с.
 . (3-78)
. (3-78)
Так как согласно (3-74) f2 = sf1, то можно написать:
 , (3-79)
, (3-79)
где
 (3-80)
(3-80)
есть э.д.с., наведенная в обмотке ротора при s = l, т. е. при неподвижном роторе.
Поля рассеяния наводят в обмотках статора и ротора э.д.с. рассеяния  и
и  , которые можно считать пропорциональными соответствующим токам:
, которые можно считать пропорциональными соответствующим токам:
 ;
;  . (3-81)
. (3-81)
Индуктивное сопротивление рассеяния статорной обмотки
 . (3-82)
. (3-82)
Индуктивное сопротивление рассеяния роторной обмотки
 , (3-83)
, (3-83)
где x2 = 2πf1Lσ2 — сопротивление при неподвижном роторе (при s = l).
Наряду с индуктивными сопротивлениями рассеяния обмотки статора и ротора имеют активные сопротивления r1 и r2.
Таким образом, допустив, что в машине существуют основное поле (и соответствующий ему поток Ф) и отдельно поля рассеяния, мы можем для обмотки статора, так же как для первичной обмотки трансформатора, написать уравнение напряжений
 . (3-84)
. (3-84)
Для обмотки ротора уравнение напряжений напишется в следующем виде:
 . (3-85)
. (3-85)
В дальнейшем мы покажем, что при составлении соотношений, устанавливающих связь между напряжением, токами, мощностями, вращающим моментом и скольжением асинхронной машины, а также связи этих величин с ее параметрами, можно исходить из ее аналогии с трансформатором; при этом вращающаяся асинхронная машина заменяется неподвижной, работающей как трансформатор с активным сопротивлением роторной цепи  и ее индуктивным сопротивлением рассеяния х2.
и ее индуктивным сопротивлением рассеяния х2.
3-8. Пространственная диаграмма н.с. двигателя
Как указывалось, основное поле в машине создается совместным действием н.с. обмоток статора и ротора.
Намагничивающая сила обмотки статора вращается относительно статора с частотой n1 (об/мин) (или с угловой частотой ω1).
Намагничивающая сила обмотки ротора вращается относительно ротора с частотой  (или sω1) в направлении его вращения. Последнее объясняется тем, что при одном и том же направлении вращения поля относительно обмоток статора и ротора (при s>0) порядки чередования фаз этих обмоток будут одинаковы. Так как сам ротор вращается в сторону вращения поля с частотой n2(ω2), то н. с. ротора относительно статора вращается с частотой
(или sω1) в направлении его вращения. Последнее объясняется тем, что при одном и том же направлении вращения поля относительно обмоток статора и ротора (при s>0) порядки чередования фаз этих обмоток будут одинаковы. Так как сам ротор вращается в сторону вращения поля с частотой n2(ω2), то н. с. ротора относительно статора вращается с частотой
 .
.
Отсюда видим, что н.с. статора и ротора вращаются относительно статора в одну и ту же сторону с одной и той же частотой; следовательно, они неподвижны одна относительно другой.
Обратимся к рис. 3-31, где изображены статор и ротор вращающейся машины. Ее основное поле, синусоидально распределенное в воздушном зазоре, можно изобразить пространственным вектором  , вращающимся с синхронной частотой ω1. При этом индукция в любой точке внутренней окружности статора определяется проекцией вектора на линию, проведенную через центр и выбранную точку.
, вращающимся с синхронной частотой ω1. При этом индукция в любой точке внутренней окружности статора определяется проекцией вектора на линию, проведенную через центр и выбранную точку.
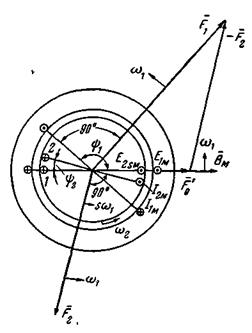
Рис. 3-31. Пространственная диаграмма н.с. двигателя (sω1 + ω2 = ω1).
Пусть в рассматриваемый момент времени вектор направлен по горизонтали, как показано на рис. 3-31. Такое же направление будет иметь пространственный вектор  н.с. создающей в воздушном зазоре основное поле с амплитудой . В этот момент времени в фазах обмоток статора и ротора, оси которых перпендикулярны к вектору , будут наводиться максимальные э.д.с.
н.с. создающей в воздушном зазоре основное поле с амплитудой . В этот момент времени в фазах обмоток статора и ротора, оси которых перпендикулярны к вектору , будут наводиться максимальные э.д.с. 
 . Направления , найденные по правилу правой руки, одинаковы при s>0, так как в этом случае поле относительно обеих обмоток перемещается в одну и ту же сторону (против часовой стрелки).
. Направления , найденные по правилу правой руки, одинаковы при s>0, так как в этом случае поле относительно обеих обмоток перемещается в одну и ту же сторону (против часовой стрелки).
Если бы роторная цепь имела только активное сопротивление, то максимум тока I2м в фазе обмотки ротора получался бы одновременно с максимумом э.д.с. E2sм в этой фазе. Но так как роторная цепь наряду с активным сопротивлением имеет индуктивное сопротивление рассеяния, то максимум тока I2м наступит позднее, чем максимум э.д.с. E2sм. В рассматриваемый момент времени максимальный ток I2м будет иметь место в фазе 2, сдвинутой относительно фазы 1 на угол ψ2 (в электрических радианах) в соответствии со сдвигом по фазе (во времени) на угол ψ2 э.д.с. и тока в обмотке ротора.
Так как амплитуда вращающейся н.с. совпадает с осью той фазы, ток которой имеет в данный момент времени максимальное значение (рис. 3-27), то пространственный вектор  н.с. роторной обмотки совпадает с осью фазы 2.
н.с. роторной обмотки совпадает с осью фазы 2.
Результирующая н.с.  . Следовательно,
. Следовательно,  . Последнее равенство при известных и позволяет определить пространственный вектор
. Последнее равенство при известных и позволяет определить пространственный вектор  н.с. статора и ту фазу его обмотки, которая имеет максимальный ток
н.с. статора и ту фазу его обмотки, которая имеет максимальный ток  .
.
На рис. 3-31 показаны векторы н.с. и только те фазы обмоток статора и ротора, в которых э.д.с. и токи в рассматриваемый момент времени имеют максимальные значения.
Значения и соответствующего потока Ф, сцепляющегося с обмоткой статора, определяются в основном напряжением U1: поток Ф должен иметь такое значение, чтобы наведенная им э.д.с. E1 почти полностью уравновешивала напряжение U1. При увеличении скольжения, что вызывается возрастанием нагрузки на валу, увеличиваются ток I2 и F2, а это в свою очередь приводит к увеличению I1 и F1, так как н.с.  должна остаться почти неизменной, поскольку остается почти неизменным создаваемый ею поток Ф.
должна остаться почти неизменной, поскольку остается почти неизменным создаваемый ею поток Ф.
3-9. Приведение вращающейся машины к неподвижной, работающей как трансформатор
Намагничивающая сила ротора при его вращении совместно с н.с. статора создает основное толе. Очевидно, что точно такое же поле будет создаваться в машине и при неподвижном роторе, если токи в его обмотке по величине и фазе (относительно э.д.с.) остаются теми же, что и при вращении.
На рис. 3-32 представлена векторная диаграмма роторной цепи при s>0, соответствующая уравнению напряжений (3-85).
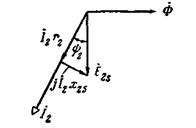
Рис. 3-32. Векторная диаграмма роторной цепи при s > 0.
Из этого уравнения находим:
 . (3-86)
. (3-86)
Если числитель и знаменатель правой части равенства разделить на s, то получим тот же ток
 , (3-87)
, (3-87)
где Е2 и х2 — э.д.с. и индуктивное сопротивление рассеяния роторной цепи при неподвижном роторе.
Таким образом, вместо вращающегося ротора можно рассматривать неподвижный ротор, но при этом необходимо считать активное сопротивление его цепи равным . В этом случае ток роторной цепи I2 остается тем же самым, что и при скольжении s, так же как и сдвиг его по фазе ψ2 относительно э.д.с. (рис. 3-32 и 3-33).
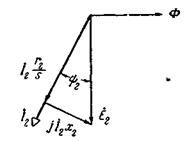
Рис. 3-33. Векторная диаграмма роторной цепи при неподвижном роторе.
Теперь мы можем перейти от вращающегося ротора к неподвижному (эквивалентному), взяв здесь только фазы статора и ротора, оси которых совпадают, и рассматривать работу машины как работу условного трансформатора, первичная (статорная) и вторичная (роторная) обмотки которого пронизываются одновременно одним и тем же главным потоком Ф (рис. 3-34). При этом необходимо, чтобы н.с. обмоток по амплитуде были равны F1 и F2 и чтобы эти н.с. по фазе (во времени) были сдвинуты на такой же угол, на который они были сдвинуты в пространстве при работе машины двигателем.
Уравнения напряжений для фаз статора и ротора можем написать так же, как для первичной и вторичной обмоток трансформатора. Уравнение напряжений роторной цепи (3-85) после деления его членов на s получает следующий вид:
 . (3-88)
. (3-88)
Отсюда также видим, что при замене вращающейся машины неподвижной, когда она работает как трансформатор (рис. 3-34), нужно в ее роторной цепи иметь активное сопротивление .
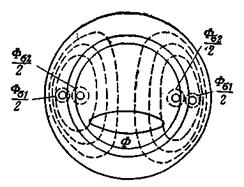
Рис. 3-34. Фазы обмоток статора и ротора асинхронной машины, работающей как трансформатор.
Тогда временной сдвиг н.с. статорной и роторной обмоток такого трансформатора будет соответствовать пространственному сдвигу н.с. вращающейся машины и мы можем написать:
 ; (3-89)
; (3-89)
здесь  взято с учетом потерь в стали статора Pс1, и вследствие этого несколько отличается от на диаграмме рис. 3-31, где для упрощения мы пренебрегали этими потерями (практически
взято с учетом потерь в стали статора Pс1, и вследствие этого несколько отличается от на диаграмме рис. 3-31, где для упрощения мы пренебрегали этими потерями (практически  ). Согласно (3-59) перепишем уравнение (3-89) в следующем виде:
). Согласно (3-59) перепишем уравнение (3-89) в следующем виде:
 . (3-90)
. (3-90)
Разделим обе части этого равенства на  . При этом получим:
. При этом получим:
 , (3-91)
, (3-91)
где
 (3-92)
(3-92)
есть ток ротора, приведенный к обмотке статора.
Обратимся теперь к уравнению напряжений роторной цепи (3-88). Помножим его на  и два последних члена правой части еще на
и два последних члена правой части еще на  .
.
Тогда, учитывая формулы для э.д.с. (3-77) и (3-80) и для приведенного тока (3-92), получим:
 , (3-93)
, (3-93)
где  (3-94)
(3-94)
— э.д.с. обмотки ротора, приведенная к обмотке статора;
 (3-95)
(3-95)
и
 (3-96)
(3-96)
— сопротивления обмотки ротора, приведенные к обмотке статора.
С учетом (3-92) и (3-94) те же соотношения между r2 и  и между х2 и
и между х2 и  мы получили бы, исходя из равенств:
мы получили бы, исходя из равенств:
 и
и  ; (3-97)
; (3-97)
Приведенные величины  и
и  были бы равны действительным величинам обмотки ротора, если бы она была выполнена с теми же числами фаз, витков в фазе, пазов на полюс и фазу и с тем же шагом, что и обмотка статора. В такой обмотке электрические потери, а также относительные падения напряжения согласно (3-97) должны остаться неизменными.
были бы равны действительным величинам обмотки ротора, если бы она была выполнена с теми же числами фаз, витков в фазе, пазов на полюс и фазу и с тем же шагом, что и обмотка статора. В такой обмотке электрические потери, а также относительные падения напряжения согласно (3-97) должны остаться неизменными.
3-10. Векторная диаграмма асинхронного двигателя
На основе уравнений напряжений (3-84) и (3-93) и уравнения токов (3-91), которые мы еще раз напишем:
;
 ;
;
, (3-98)
могут быть построены векторные диаграммы асинхронной машины, приведенной к работе трансформатором.
На рис. 3-35 представлена диаграмма, соответствующая работе машины двигателем.
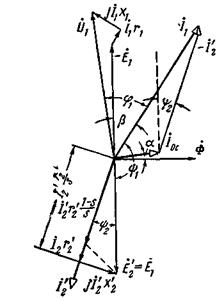
Рис. 3-35. Векторная диаграмма асинхронного двигателя (приведенного к работе трансформатором).
Она аналогична векторной диаграмме трансформатора, имеющего чисто активную нагрузку. К первичной (статорной) обмотке подведено напряжение  . На зажимах, приведенной вторичной (роторной) обмотки, получается напряжение
. На зажимах, приведенной вторичной (роторной) обмотки, получается напряжение
 . (3-99)
. (3-99)
Мощность, отдаваемая вторичной обмоткой, равна:
 , (3-100)
, (3-100)
т. е. той механической мощности  , которую развивал бы ротор машины при работе ее двигателем со скольжением s [cм. уравнение (3-70а)].
, которую развивал бы ротор машины при работе ее двигателем со скольжением s [cм. уравнение (3-70а)].
Из диаграммы на рис. 3-35 мы можем также получить выражение для электромагнитной мощности Рэм, передаваемой полем со статора ротору. Для этого спроектируем векторы напряжений обмотки статора на направление вектора  . Будем иметь:
. Будем иметь:
 . (3-101)
. (3-101)
Умножим полученное уравнение на m1I1;
 . (3-102)
. (3-102)
Из диаграммы следует, что
 . (3-103)
. (3-103)
Подставляя (3-103) в (3-102), получим:
 , (3-104)
, (3-104)
а отсюда, учитывая, что  ,
,  ,
,  , будем иметь:
, будем иметь:
 , (3-105)
, (3-105)
или
 . (3-106)
. (3-106)
3-11. Векторная диаграмма асинхронного тормоза
Векторная диаграмма н.с. машины, работающей тормозом, принципиально не отличается от диаграммы рис 3-31, так как при вращении ротора против поля (s>l) направление перемещения поля относительно проводников статора и ротора будет тем же, что и при работе машины двигателем.
Диаграмма временных векторов может быть построена для условного трансформатора (рис. 3-34) на основе тех же уравнений (3-98). Она представлена на рис. 3-36.
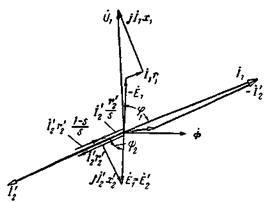
Рис. 3-36. Векторная диаграмма асинхронного тормоза (приведенного к работе трансформатором).
Здесь вектор  направлен против
направлен против  , так как при s > 1 величина
, так как при s > 1 величина  является отрицательной; следовательно, мы его должны рассматривать как вектор напряжения, приложенного извне к зажимам роторной цепи. Мы должны считать, что в роторную цепь включен внешний источник энергии, мощность которого
является отрицательной; следовательно, мы его должны рассматривать как вектор напряжения, приложенного извне к зажимам роторной цепи. Мы должны считать, что в роторную цепь включен внешний источник энергии, мощность которого  вводится в обмотку ротора, где расходуется на электрические потери. Другая часть
вводится в обмотку ротора, где расходуется на электрические потери. Другая часть  полных электрических потерь
полных электрических потерь  в обмотке ротора покрывается за счет мощности, передаваемой ротору со статора магнитным полем.
в обмотке ротора покрывается за счет мощности, передаваемой ротору со статора магнитным полем.
Для вращающейся машины, работающей тормозом, мощность  является механической мощностью, подведенной извне к ее ротору.
является механической мощностью, подведенной извне к ее ротору.
3-12. Асинхронный генератор и его векторная диаграмма
Работу асинхронной машины генератором (при s < 0) мы также можем привести к работе некоторого условного трансформатора.
Обратимся сначала к рис. 3-37, где приведена диаграмма пространственных векторов н.с. обмоток статора и ротора при работе машины генератором.
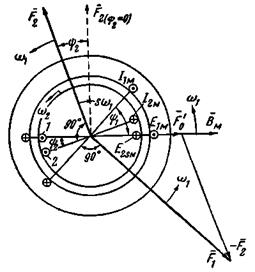
Рис. 3-37. Пространственная диаграмма н.с. асинхронного генератора (  ).
).
Здесь, так же как и для двигателя, принято, что в рассматриваемый момент времени пространственный вектор индукции , вращающийся с угловой частотой ω1 относительно статора, направлен по горизонтали.
На рис 3-37 показаны фазы статора и ротора, в которых наводятся максимальные э.д.с.  и
и  . Их направления найдены с учетом перемещения проводников фаз относительно поля. При ω1 < ω2 проводники фазы ротора перемещаются относительно поля в направлении, обратном перемещению относительно поля проводников фазы статора (рис. 3-38). Поэтому э.д.с. E1м и E2sм имеют взаимно противоположные направления.
. Их направления найдены с учетом перемещения проводников фаз относительно поля. При ω1 < ω2 проводники фазы ротора перемещаются относительно поля в направлении, обратном перемещению относительно поля проводников фазы статора (рис. 3-38). Поэтому э.д.с. E1м и E2sм имеют взаимно противоположные направления.
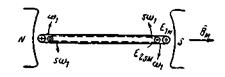
Рис. 3-38. К определению направлений э.д.с. статорной и роторной обмоток при s < 0.
Если бы ток  совпадал по фазе с э.д.с.
совпадал по фазе с э.д.с.  , то вектор
, то вектор  совпадал бы с осью катушки 1 ротора, имеющей максимальную э.д.с.
совпадал бы с осью катушки 1 ротора, имеющей максимальную э.д.с.  . Но вследствие наличия в роторной цепи индуктивного сопротивления x2s ток отстает по фазе относительно на угол ψ2. Поэтому максимальный ток I2м будет иметь место в катушке 2, где э.д.с. была максимальной ранее на промежуток времени, соответствующий углу ψ2. Следовательно, в действительности (при ψ2 > 0) вектор будет совпадать с осью катушки 2. При ψ2 > 0 (при отстающем от э.д.с. токе) н.с. смещается в сторону, противоположную вращению н.с. относительно ротора, но по отношению к статору она смещается в сторону вращения поля.
. Но вследствие наличия в роторной цепи индуктивного сопротивления x2s ток отстает по фазе относительно на угол ψ2. Поэтому максимальный ток I2м будет иметь место в катушке 2, где э.д.с. была максимальной ранее на промежуток времени, соответствующий углу ψ2. Следовательно, в действительности (при ψ2 > 0) вектор будет совпадать с осью катушки 2. При ψ2 > 0 (при отстающем от э.д.с. токе) н.с. смещается в сторону, противоположную вращению н.с. относительно ротора, но по отношению к статору она смещается в сторону вращения поля.
Намагничивающую силу статора , найдем, исходя из равенства  . Отсюда найдем ту фазу статора, ток которой в данный момент времени имеет максимальное значение (рис. 3-37).
. Отсюда найдем ту фазу статора, ток которой в данный момент времени имеет максимальное значение (рис. 3-37).
Если допустить, что  и x2s = 0, то мы получили бы совпадение по фазе и
и x2s = 0, то мы получили бы совпадение по фазе и  ; максимальный ток был бы в той же катушке, в которой наводится максимальная .э.д.с. . В действительности > 0 и x2s > 0, поэтому и сдвинуты по фазе, но на угол, меньший
; максимальный ток был бы в той же катушке, в которой наводится максимальная .э.д.с. . В действительности > 0 и x2s > 0, поэтому и сдвинуты по фазе, но на угол, меньший  ( опережает на угол ψ1 < ); следовательно, мощность
( опережает на угол ψ1 < ); следовательно, мощность  — положительна, так же как для вторичной обмотки трансформатора. Тем самым подтверждается, что при s<0 машина работает генератором.
— положительна, так же как для вторичной обмотки трансформатора. Тем самым подтверждается, что при s<0 машина работает генератором.
Переходя от вращающейся машины, работающей генератором, к неподвижной машине, работающей трансформатором (рис. 3-34), мы должны иметь н.с. обмоток, равными по амплитуде F2 и F1 и сдвинутыми по фазе (во времени) так же, как они сдвинуты в пространстве при работе машины генератором.
Следовательно, согласно уравнениям (3-98) векторная диаграмма трансформатора, эквивалентного асинхронному генератору, будет иметь вид, представленный на рис. 3-39 (здесь также показаны векторы э.д.с. и падений напряжения цепи вращающегося ротора при s < 0).
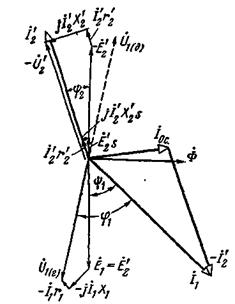
Рис. 3-39. Векторная диаграмма асинхронного генератора (приведенного к работе трансформатором).
При работе машины трансформатором с токами  и
и  , показанными на рис. 3-39, мы должны считать роторную обмотку за первичную, а статорную — за вторичную. На зажимах вторичной обмотки мы будем иметь напряжение
, показанными на рис. 3-39, мы должны считать роторную обмотку за первичную, а статорную — за вторичную. На зажимах вторичной обмотки мы будем иметь напряжение  . Оно направлено против напряжения
. Оно направлено против напряжения  , которое было приложено к машине при ее работе двигателем. При этом мощность, отдаваемая генератором в сеть, равна m1U1I1cosj1.
, которое было приложено к машине при ее работе двигателем. При этом мощность, отдаваемая генератором в сеть, равна m1U1I1cosj1.
Мы должны считать, что к зажимам первичной обмотки извне приложено.напряжение

Мощность, подводимая к первичной (роторной) обмотке, равна:
Она является чисто активной мощностью и соответствует механической мощности ротора  при работе машины генератором со скольжением s.
при работе машины генератором со скольжением s.
Для того чтобы выяснить, какие условности принимаются в отношении и , обратимся к рис. 3-40. Будем считать, что машина 2 работает генератором с напряжением на его зажимах  .
.
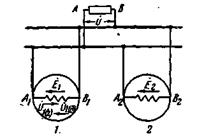
Рис. 3-40. К рассмотрению работы машины двигателем и генератором.
Если машина 1 работает двигателем и, следовательно, потребляет активную мощность, то векторная диаграмма строится для обхода B2A2A1B1B2: для этого обхода величина  рассматривается как составляющая напряжения
рассматривается как составляющая напряжения  , уравновешивающая э.д.с.
, уравновешивающая э.д.с.  ; ток относительно э.д.с. при этом сдвинут на угол, больший
; ток относительно э.д.с. при этом сдвинут на угол, больший  (
(  на рис. 3-35).
на рис. 3-35).
Если машина 1 работает генератором и, следовательно, отдает активную мощность, то векторная диаграмма строится для обхода В1А1АBВ1; здесь  – составляющая э.д.с. , равная падению напряжения в сопротивлении А—В; при этом ток относительно э.д.с. сдвинут на угол, меньший (
– составляющая э.д.с. , равная падению напряжения в сопротивлении А—В; при этом ток относительно э.д.с. сдвинут на угол, меньший (  на рис. 3-39).
на рис. 3-39).
Реактивный ток, необходимый для возбуждения в асинхронной машине магнитного поля, она сама не может создавать. Он к ней должен подводиться из сети при всех режимах ее работы.
Асинхронный генератор может работать только при опережении током э.д.с. . Такой режим при одиночной работе генератора можно создать при помощи конденсаторов. Однако в обычных случаях требуются конденсаторы большой емкости. Они получаются громоздкими и дорогими: к тому же, если их емкость постоянна, то напряжение на зажимах генератора с увеличением нагрузки резко падает, а его стабилизация встречает большие затруднения.
Асинхронный генератор иногда включается на параллельную работу с синхронным генератором, позволяющим путем изменения его тока возбуждения изменять реактивную составляющую отдаваемого им тока (§ 4-7,в). Условия работы синхронной машины при этом ухудшаются, так как она должна работать с пониженным cos φc, отдавая отстающий реактивный ток не только во внешнюю сеть, но и асинхронной машине для создания в ней магнитного поля (рис. 3-41).
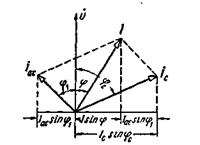
Рис. 3-41. Диаграмма векторов напряжения и токов: нагрузки  , асинхронного генератора
, асинхронного генератора  и синхронного генератора
и синхронного генератора  при их параллельной работе.
при их параллельной работе.
3-13. Вращающий момент
Дата добавления: 2016-01-29; просмотров: 1651;